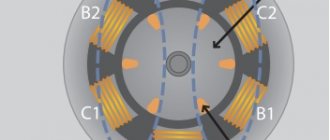
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.
Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.
Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.
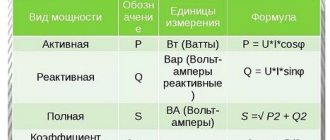
Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 – 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
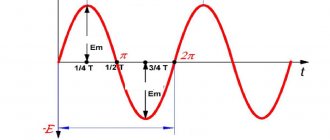
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.
Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя
Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.
Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Источник: electrik.info
Номинальная мощность электродвигателя
Термины и определения.
Большое разнообразие типов и конструкций электрических машин и потребность в объективной оценке и сравнении их данных привели к необходимости стандартизации основных понятий в области характеристик, расчетных параметров и режимов работы машин. Термины и определения этих величин установлены несколькими ГОСТ и являются обязательными для применения в документации всех видов, учебниках, учебных пособиях, технической и справочной литературе. Стандарты содержат более 200 терминов и определений. В настоящем параграфе приводятся основные из них, относящиеся ко всем или ко многим типам вращающихся электрических машин независимо от их назначения и конструктивного исполнения. Асинхронный электродвигатель Асинхронный электродвигатель – электрическая асинхронная машина для преобразования электрической энергии в механическую. Принцип работы асинхронного электродвигателя основан на взаимодействии вращающегося магнитного поля, возникающего при прохождении трёхфазного переменного тока по обмоткам статора, с током, индуктированным полем статора в обмотках ротора, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля. Синхронный электродвигатель Синхронной называется электрическая машина, скорость вращения n (об/мин) которой связана постоянным отношением с частотой n = 60 * f / p (где р — число пар полюсов машины) сети переменного тока, в которую эта машина включена. Синхронный машины служат генераторами переменного тока; синхронные электродвигателя применяются во всех тех случаях, когда нужен двигатель, работающий при постоянной скорости; для получения регулируемого реактивного тока устанавливают синхронные компенсаторы. Электродвигатель постоянного тока Хотя система своременного электроснабжения основана на применении переменного тока, тем не менее машины постоянного тока находят широкое использование в самых различных отраслях промышленности и в быту.
Номинальные режимы работы двигателя
Различные условия работы производственных механизмов обуславливают различные режимы работы электроприводов. Поэтому в электромашиностроении номинальные режимы электрических двигателей классифицируются на восемь режимов с условными обозначениями от S1 до S8.
S1 — продолжительный номинальный режим работы. Соответствует режиму, при котором двигатель работает с номинальной нагрузкой столько времени, что превышения температуры всех его частей достигают установившихся значений, которые должны быть равны допустимым (рис. 6.8). Условию τуст=τдоп
соответствуют каталожные данные двигателя
Pн
,
Uн
,
Iн
,
nн
.
Двигатели продолжительного номинального режима работы предназначены преимущественно для обширной группы электроприводов механизмов непрерывного действия.
S2 — кратковременный номинальный режим работы. Режим, при котором периоды номинальной нагрузки чередуются с периодами отключения двигателя, причем за время работы двигатель не успевает нагреться до установившейся температуры, а за время отключения успевает охладиться до температуры окружающей среды (рис. 6.9). Вследствие этого начальное превышение температуры при каждом включении равно нулю, а достигаемое в конце работы превышение температуры двигателя согласно (6.35):
определяется величиной нагрузки, временем работы tрн
и постоянной времени нагрева
Tн
. Таким образом, номинальная мощность двигателя кратковременного режима S2 соответствует определенному номинальному времени работы
tрн
, значения которого стандартизованы величинами 15, 30, 60 и 90 мин.
Если фактическое время работы больше номинального, двигатель будет нагреваться до температуры, большей допустимой, и во избежание этого нагрузка должна быть снижена. Таким образом, нельзя использовать двигатель с такой же нагрузкой в длительном режиме, так как установившаяся температура двигателя t o уст
будет больше допустимой
t o доп
(рис. 6.9).
В случае, если фактическое время работы будет меньше номинального, двигатель можно в соответствующей степени перегрузить.
Двигатели кратковременного режима широко используются на электрическом транспорте (двери, разгрузочные механизмы) и для различных кратковременно работающих вспомогательных механизмов в промышленности.
S3 — повторно-кратковременный номинальный режим работы. Режим, при котором периоды работы с номинальной нагрузкой чередуются с периодами отключения двигателя, причем за время работы двигатель не успевает нагреться до установившейся температуры, а за время паузы не успевает охладиться до температуры окружающей среды (рис. 6.10).
По прошествии определенного числа циклов после включения температура двигателя, повышаясь, достигнет квазиустановившегося значения, и будет колебаться вокруг среднего значения t o у.ср
. Максимальное превышение температуры
τmax
не должно превышать допустимого значения
τдоп
. Для наиболее полного использования двигателя по нагреву колебания температуры вокруг среднего установившегося значения должны быть минимальными. Это может быть достигнуто при выполнении условия
tр
S4 — повторно-кратковременный номинальный режим с частыми пусками.Данный режим характеризуется значительным влиянием пусковых динамических процессов на нагрев двигателя. Это может происходить при достаточно большом суммарном времени пуска за цикл работы.
S5 — повторно-кратковременный номинальный режим с частыми реверсами.В цикле работы электропривода присутствуют как тяжелые, длительные по времени пусковые режимы, так и участки с электрическим торможением.
S6 — перемежающийся номинальный режим работы. Характеризуется чередованием периодов работы двигателя с номинальной нагрузкой с периодами работы вхолостую, причем за время работы с нагрузкой двигатель не успевает нагреться до установившейся максимальной температуры, а за время работы вхолостую не успевает охладиться до установившейся минимальной температуры холостого хода. Характеристикой режима S6 является относительная продолжительность нагрузки:
где tн
и
tхх
– времена работы соответственно с номинальной нагрузкой и в холостую.
Продолжительность цикла не должна превышать 10 мин. Номинальные значения ПН нормируются величинами 15, 25, 40, 60 и 100%.
S7 — перемежающийся номинальный режим работы с частыми реверсами.Этот режим отличается от повторно-кратковременного S5 тем, что в цикле работы отсутствуют периоды отключения двигателя.
S8 — перемежающийся номинальный режим работы с двумя и более скоростями в цикле работы.Тяжелый режим работы, в котором отсутствуют периоды отключения двигателя, одновременно регулируется скорость вращения двигателя (соответственно есть пусковые и тормозные режимы). Этим режимом работы характеризуются приводы подач металлорежущих станков с автоматизированным рабочим циклом при изготовлении сложных изделий.
Таким образом, номинальные режимы S4÷S8 дополняют конкретную информацию об интенсивных повторно-кратковременных режимах и о продолжительных режимах с переменной циклической нагрузкой.
Что такое номинальная мощность?
С термином «номинальная мощность» мы сталкиваемся практически ежедневно. Выбираем ли электрический чайник или лампу накаливания – везде указано это значение. Единицей измерения являются ватты или киловатты. Казалось бы – что может быть проще в этом вопросе? Ведь еще со школьного курса физики всем известно, что для определения мощности (P) достаточно перемножить значения тока и напряжения. Но что скрывается за словами « номинальная мощность »? Под термином «номинальный» понимают определенное значение чего-либо, не учитывающее внешних корректирующих факторов. Таким образом, номинальная мощность – указанное производителем значение, которое может быть получено только при предусмотренных расчетных параметрах. Это общее понятие. В каждом же конкретном случае необходимо учитывать свои специфичные особенности. Приведем пример с лампой накаливания. На ее стеклянной колбе отмечено: 230 В, 100 Вт. То есть, 100 Вт может быть достигнуто только при напряжении в 230 В. Номинальная мощность – это те самые 100 Вт. Ее значение уменьшается со снижением напряжения и увеличивается с повышением так как эти параметры находятся в прямой зависимости друг от друга (P=I*U).
Частота вращения ротора
Для вычисления этого параметра электродвигателей нам понадобится частота переменного тока и количество оборотов в минуту при оптимальной нагрузке. Пусть в паспортной табличке указаны следующие данные: частота тока составляет 50 Гц, а количество оборотов – 2800.
Переменный ток создает магнитное поле, которое имеет частоту 50*60=3000 оборотов в секунду. Известно, что электродвигатель асинхронный, а это означает, что наблюдается отставание от номинальной частоты вращения на некоторую величину. Назовем ее скольжением и обозначим за s.
Величина скольжения определяется следующей формулой: s = ((3000 – 2800) / 3000) * 100% = 6,7%.
Выбор генератора по мощности
Выбирая генератор, потребитель обращает внимание на различные параметры установки – вес, запас моторесурса, мобильность, наличие дополнительного функционала, цену, и т.д. Но в первую очередь необходимо выбирать установку, ориентируясь на ее мощность. Как правильно рассчитать этот показатель и на что обратить внимание?
Чтобы было понятней, разберем эту ситуацию на простом примере. Допустим, в нашем пользовании имеются такие бытовые приборы: пылесос, калорифер, морозильник. Мощность этих бытовых приборов составляет соответственно 1 кВт, 2 кВт и 0,3 кВт. Получается, чтобы обеспечить работу этих приборов, нам необходим генератор мощностью не менее 3 кВт. Чтобы понять это, разберемся в таком понятии, как номинальная мощность генератора.
Номинальная, или, как ее еще называют, реальная мощность установки, существенно отличается от максимальной. В технической документации производители чаще всего указывают именно максимальные показатели по мощности для данной модели генератора. Стоит отметить, что с такой нагрузкой установка без критических последствий может работать очень непродолжительное время – в некоторых случаях это секунды, иногда 1-2 минуты. В то же время реальная, или номинальная мощность несколько ниже максимального показателя. Для ее расчета необходим коэффициент мощности cos φ. Этот показатель определяется отношением активной мощности к полной.
Линейная скорость
Этот механический параметр характеризует оборудование, в устройстве которого используется данный асинхронный двигатель. Допустим, что к валу двигателя присоединен диск определенного радиуса R. В этом случае величина линейной скорости может быть определена по следующей формуле:
- Линейная скорость = Угловая скорость * R.
- Рассчитаем линейную скорость для нашего примера. Возьмем R = 0.3 м.
- Линейная скорость = 293,276 * 0,3 = 87,9828 м/c.
Пример
Допустим, в нашем распоряжении генератор с показателями мощности в 3 кВА и cos φ, равным 0,8. В таком случае номинальная мощность данной установки будет равна:
3 кВА х 0,8=2,4 (кВт)
Теперь можно понять, почему мощность может указываться в тех или иных единицах измерения, в ваттах (Вт) или Вольт Амперах (ВА). Некоторые производители, чтобы избавить потребителя от необходимости проведения вычислений, просто указывают в сопроводительной документации оба значения мощности – номинальной и максимальной. Встречаются также варианты, когда производителем указывается только одна из мощностей и приводится значение коэффициента мощности. Некоторые недобросовестные компании могут скрывать коэффициент мощности от потребителя. Это делается с целью выдать генератор за более мощную, чем на самом деле, установку.
Максимально допустимая мощность лодочного мотора
Американский стандарт BIA определяет максимально безопасную мощность подвесного мотора для лодки из произведения ее длины к ширине транца.
| Мощность (л.с.) | 3 | 5 | 7,5 | 10 | 15 | 20 | 25 | 30 | 40 | 50 | 60 |
| Длина*Ширина танца (кв.м.) | 3,25 | 3,5 | 3,8 | 4,1 | 4,4 | 4,8 | 5,2 | 6,4 | 7,0 | 7,5 | 8,0 |
Правда тут необходима некоторая корректировка. Если лодка узкая и достаточно плоскодонная (как первые «Казанки») то такая расчетная мощность будет не совсем безопасной, особенно при управлении малоопытным шкипером. При таком раскладе рекомендуется результирующую мощность после расчетов разделить на 2. Даже такой мощности будет вполне достаточно для выхода лодки на режим глиссирования, а также лодка будет вполне безопасной.
Источник
Учет вида нагрузки
Для бытовых электроприборов характерны два вида нагрузки:
Активная (омическая) нагрузка потребляется приборами, которые преобразуют получаемую энергию в тепло. Это электрическая плита, утюг, фен, калориферы и т.д. Реактивную нагрузку потребляют остальные электроприборы, преобразующие в тепло только незначительную часть энергии. Основная часть потребляемой энергии используется с другой целью. Примерами таких приборов могут быть холодильник, пылесос, телевизор, компьютер и т.д.
Если вам нужна помощь в выборе мощности генератора для вашего дома, производственного цеха или любого другого объекта, обратитесь за квалифицированной консультацией к нашим специалистам.
Источник: www.tecnuvo.ru
Типы двигателей
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.
Главный недостаток электродвигателей постоянного тока — возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
Синхронные электродвигатели
Синхронные двигатели — оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок — до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
номинальная мощность электродвигателя
3.13 номинальная мощность электродвигателя
: Полезная механическая мощность на валу, выраженная в ваттах (Вт) или киловаттах (кВт).
Смотри также родственные термины:
Номинальная мощность электродвигателя (электродвигателей)
Номинальная мощность электродвигателя (электродвигателей)
Словарь-справочник терминов нормативно-технической документации . academic.ru . 2015 .
Смотреть что такое “номинальная мощность электродвигателя” в других словарях:
Номинальная мощность электродвигателя (электродвигателей) — 1.7 По ГОСТ 10512 78 Источник … Словарь-справочник терминов нормативно-технической документации
Номинальная мощность — 4а. Номинальный ток светового прибора Ток, указанный изготовителем на световом приборе Источник: ГОСТ 16703 79: Приборы и комплексы световые. Термины и определения оригинал документа … Словарь-справочник терминов нормативно-технической документации
Электрическая мощность — Электрическая мощность физическая величина, характеризующая скорость передачи или преобразования электрической энергии. Содержание 1 Мгновенная электрическая мощность … Википедия
СТО 70238424.29.160.30.002-2009: Электродвигатели. Организация эксплуатации и технического обслуживания. Нормы и требования — Терминология СТО 70238424.29.160.30.002 2009: Электродвигатели. Организация эксплуатации и технического обслуживания. Нормы и требования: 3.1 асинхронный пуск вращающегося электродвигателя переменного тока : Пуск вращающегося электродвигателя… … Словарь-справочник терминов нормативно-технической документации
1: — Терминология 1: : dw Номер дня недели. «1» соответствует понедельнику Определения термина из разных документов: dw DUT Разность между московским и всемирным координированным временем, выраженная целым количеством часов Определения термина из… … Словарь-справочник терминов нормативно-технической документации
Номинальный вращающий момент
Такой параметр, как вращающий момент электродвигателя, показывает, каким образом механическая мощность устройства зависит от угловой скорости. Эту зависимость иллюстрирует простое соотношение: вращающий момент – это отношение мощности к угловой скорости.
Существует также соотношение между вращающим моментом и радиусом шкива: Момент = Сила * Радиус.
Это равенство говорит о том, что меньшем радиусе вращения сила увеличивается, и наоборот. То есть при проектировании устройства с асинхронным двигателем следует учесть тот факт, что действующая сила увеличивается с приближением к оси вала. В некоторых случаях эта особенность может сыграть важную роль.
Таким образом, для расчета всех необходимых электрических и механических характеристик электродвигателя достаточно знать данные, которые указаны на паспортной табличке или, другими словами, шильдике. Простые формулы помогут правильно настроить работу электрооборудования и оптимально использовать производственные ресурсы.
Подключение электродвигателя — основные схемы, способы и особенности подсоединения различных моделей (инструкция + фото)Однофазный электродвигатель: основные виды, принцип работы и инструкция по подключению и настройке. Обзор лучших производителей!
Перемотка электродвигателей: пошаговая инструкция по ремонту и восстановлению обмотки двигателя своими руками (инструкция с фото и видео)
Виды электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
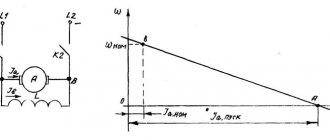
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам
Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
Правильная мощность двигателя и преобразователя частоты
Производители электродвигателей и частотных преобразователей разработали различные методы для быстрого выбора мощности двигателей и частотных преобразователей под конкретную нагрузку оборудования. Такая же базовая процедура используется большинством инженерных приложений. Однако для инженеров важно четко понимать процедуру выбора.
Одна из лучших процедур использует простую нумерацию, основанную на кривых ограничения нагрузки, чтобы сделать основной выбор мощности двигателя. Эта процедура описана ниже. Затем проверяются другие факторы, чтобы обеспечить оптимальную комбинацию двигателя и преобразователя.
Рекомендуются 4 следующих принципа подбора:
Принцип выбора 1:
Во-первых, базовая скорость должно выбираться таким образом, чтобы двигатель работал как можно с большей скоростью, немного превышающей базовую скорость 50 Гц.
Это желательно, потому что:
- Тепловая мощность двигателя улучшается при f ≥ 50 Гц из-за более эффективного охлаждения на более высоких скоростях.
- Потери коммутации преобразователя минимальны, когда он работает в диапазоне ослабления поля выше 50 Гц.
- При постоянной нагрузке на крутящий момент достигается больший диапазон скорости, когда двигатель работает хорошо в диапазоне ослабления поля с максимальной скоростью. Это означает, что наиболее эффективное использование крутящего момента и скорости привода переменной скорости .
Типичные кривые крутящего момента и мощности при постоянном приводе мощности / крутящего момента
Это может означать экономию средств в виде меньшего двигателя и преобразователя .
Хотя многие производители утверждают, что их преобразователи могут производить выходные частоты до 400 Гц, эти высокие частоты практически не используются, за исключением особых (и необычных) исполнений. Конструкция стандартных каркасных двигателей и снижение пикового крутящего момента в зоне ослабления поля ограничивают их использование на частотах выше 100 Гц.
Максимальная скорость, с которой может запускаться стандартный двигатель с короткозамкнутым ротором , должна всегда проверяться у изготовителя, особенно для более крупных 2-полюсных (3000 об / мин) двигателей более 200 кВт. Шум вентилятора, создаваемый двигателем, также значительно увеличивается по мере увеличения скорости двигателя.
Сравнение крутящего момента, создаваемого 4-полюсным и 6-полюсным двигателями , показано на рисунке 1. Это иллюстрирует более высокую крутящую способность 6-полюсной машины.
Сравнение предельных кривых тепловой мощности для двух двигателей с короткозамкнутым ротором мощностью 90 кВт
a) 90 кВт 4-полюсный двигатель (1475 об / мин)
b) 90 кВт 6-полюсный двигатель (985 об / мин)
Принцип выбора 2:
Выбор двигателя большей мощности просто для того, чтобы быть «безопасным», обычно не рекомендуется, потому что это означает, что также должен быть выбран преобразователь с увеличенным частотным диапазоном. Преобразователи частоты, в частности, ШИМ-тип, рассчитаны на максимальное значение пикового тока, которое представляет собой сумму основных и гармонических токов в двигателе .
Чем больше двигатель, тем больше пиковые токи.
Чтобы избежать этого пикового тока, превышающего расчетный предел, конвертер никогда не должен использоваться с размером двигателя, большим, чем для указанного . Даже когда большой двигатель слегка загружен, его пики гармонических токов высоки.
Принцип выбора 3:
После выбора двигателя достаточно легко выбрать правильный размер преобразователя из каталога производителя . Обычно они рассчитаны на ток (не кВт) на основе определенного напряжения. Это следует использовать только в качестве руководства, поскольку преобразователи всегда должны выбираться на основе максимального непрерывного тока двигателя.
Хотя большинство каталогов основаны на стандартных номинальных значениях мощности двигателя IEC (кВт), двигатели разных производителей имеют несколько разные номинальные токи.
Исполнения электродвигателей по климатике
При подборе электродвигателя необходимо знать каких климатических условий данный двигатель будет эксплуатироваться.
Ниже перечислены обозначения разных климатических исполнениях:
- У –Умеренном климате;
- ХЛ – Холодном климате;
- ТС – Тропическом Сухом климате;
- ТВ – Тропическом Влажном климате;
- Т –Тропическом климате (обобщенное);
- М – Морском климате;
Цифровое значение после буквенного обозначения марки показывают на тип ее размещения:
- 1 – работа на «улице»;
- 2 –работа на «улице», но под навесом;
- 3 – работа в помещениях;