Методы пуска двигателей постоянного тока, снижающие нагрузку на детали мотора в связи с завышенными значениями пускового тока. Особенности реализации прямого пуска, его достоинства и недостатки. Как осуществляется пуск трехфазных электромоторов методом плавного увеличения питающего напряжения.
Характерной особенностью электродвигателей постоянного тока (ЭПТ) является необходимость использования пусковых токов увеличенного номинала по сравнению с более распространёнными асинхронными электродвигателями, функционирующими на переменном токе. Это заставляет производителей тщательнее выбирать способ пуска двигателя постоянного тока, от которого будет зависеть функциональность электромотора, его надежность и долговечность.
На практике применяют несколько методов пуска, каждый из которых способен временно ограничить значение пускового тока, чтобы цепь обмотки якоря преждевременно не вышла из строя.
Рассмотрим перечисленные способы детальнее.
Прямой пуск
При запуске ЭПТ токовая нагрузка растет вместе с увеличением значения крутящего момента, передаваемого на ротор. Этот момент характеризуется значительным ростом температуры обмотки статора, что может стать причиной повреждения изоляции и короткого замыкания. Резкое возрастание нагрузки чревато сильными вибрациями и приводит к механическому повреждению деталей мотора.
При прямом пуске проблема решается подключением обмотки якоря непосредственно к электроцепи, но при условии стабильности показателей электрического тока.
Прямой пуск электродвигателя ПТ используется для маломощных электродвигателей (с номиналом, не превышающим 1 кВт), и он самый простой в реализации. Рабочие температуры при этом растут не настолько сильно, как при использовании других способов пуска.
В случае интенсивной эксплуатации электродвигателя с частым включением/выключением его оснащают расцепителем, управляемым вручную. Его задача – подавать напряжение в момент пуска непосредственно на клеммы двигателя.
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Картинка кликабельна.
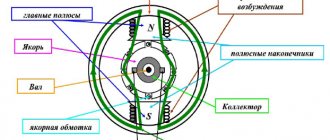
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Реостатный пуск
Этот способ, в отличие от предыдущего, используется для обеспечения пуска электромоторов повышенной мощности.
Для этого в его электрическую схему включают реостат, представляющий собой секционный провод с высоким показателем удельного сопротивления. При реостатном способе пуска ЭПТ сопротивление реостата быстро уменьшается, что позволяет исключить большие перепады по току.
Такой прием позволяет осуществлять разгон вала электромотора с постоянным ускорением, что положительно сказывается на долговечности двигателя. Число секций реостата может варьироваться в широких пределах, обычно это 2-7 сегментов. Их количество зависит от разности максимального и минимального значений пускового тока, а также от требований к плавности пуска.
Задача обеспечения выравнивания значений пускового тока на всех стадиях процесса в рамках заданного временного промежутка решаема, но в целом автоматизации не поддается. Если без этого нельзя, то есть ЭПТ является частью автоматизированного комплекса, используется приём с автоматическими контакторами, которые срабатывают поочередно и шунтируют пусковые сопротивления.
При выходе двигателя на рабочие обороты реостат подлежит отключению от цепи, поскольку его характеристики позволяют работать непродолжительное время, иначе он просто выйдет из строя. Снижение сопротивления, как и его рост в начале, происходит дискретно.
Устройство электродвигателя
Основные элементы, из которых состоит типичный трехфазный двигатель таковы:
- Корпус, имеющий ножки, которыми он крепится к фундаменту;
- Статор, напоминающий по строению простой трансформатор. Имеет сердечник и обмотку При подаче тока создается вихревое электромагнитное поле.
- Ротор. Основная вращающаяся часть.
- Вал, на который жестко насажен ротор. Передняя часть выходит наружу, имеет шпоночную борозду под шестерни или шкив. На заднюю часть, выходящую за пределы корпуса насаживается крыльчатка для охлаждения и обдува.
- Подшипки, находящиеся в нишах передней и задней крышки.
- Герметичная клеммная коробка.
Плавный пуск
Метод плавного пуска электрического двигателя постоянного тока номиналом 12В применяется как альтернатива реостатному. Он используется в ситуациях, когда задача контроля скорости вращения не стоит. В качестве примера можно назвать аварийные турбинные насосы.
Принцип функционирования следующий: после запуска электродвигателя постоянного тока срабатывает устройство, удерживающее ток на якоре в рамках определенного значения, которое выше тока на валу мотора, и этот регулятор напряжения работает до тех пор, пока обороты двигателя не достигнут номинальных величин.
После этого ЭПТ начинает работать в обычном режиме, соответствующем величине напряжения источника питания, который не обязательно должен быть маломощной сетью постоянного тока – допускается использование аккумуляторов. Его подключение к двигателю осуществляется посредством специальных контакторов.
Отметим, что при методе плавного пуска мотора постоянного тока используются разные схемы пуска – от однофазных до трехфазных. Последняя сложнее в реализации, но считается самой надежной и универсальной.
Независимо от вида пуска (прямого, плавного, реостатного) двигателя постоянного тока, используются несколько типов возбуждения:
- последовательное;
- параллельное;
- независимое.
Рассмотрим особенности пуска электродвигателя перечисленных типов возбуждения.
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»)
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Запуск ЭПТ с параллельным возбуждением
При использовании такой схемы обмотка якоря и обмотка возбуждения подключены параллельно, что обеспечивает одинаковую разность потенциалов. При этом на вход вспомогательной обмотки при пуске подается несколько меньший ток, нежели на обмотки статора/ротора.
Чтобы снизить влияние пусковых характеристик на оборудование, непосредственно при старте срабатывает реостат, уменьшая нагрузки на мотор, после чего отключается. Если пуск в силу разных причин может оказаться затяжным, используется схема, состоящая из нескольких пусковых резисторов/реостатов:
В этом случае последовательность сопротивлений Rпуск1-Rпуск3 позволяет снизить ток, идущий через обмотки, до минимальных значений. Как только ток достигнет порогового значения, сработают реле К1-К3, что приведёт к замыканию контакта К1.1. В результате первый резистор будет зашунтирован, ток скачкообразно повысится, но за счёт оставшихся резисторов снова снизится, и в момент минимума замкнется следующий контакт, а затем по такой же схеме – последний. К этому моменту скорость вращения вала достигнет номинала.
При торможении эта же схема сработает в обратную сторону.
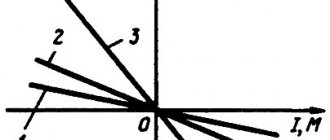
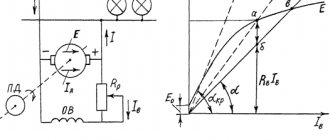
Графический метод расчета пусковых реостатов
В основе графического метода лежит пусковая диаграмма двигателя. Пусковая диаграмма, представленная на рис. 13.14, совмещена с трехступенчатым пусковым реостатом; K1, К2 и КЗ являются контактами силовых контакторов, посредством которых осуществляется переключение ступеней реостата, а rдоб1, rдоб2 и rдоб3 — резисторы ступеней пускового реостата. Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
I1 = (1,5…2,5)Iaном
I2 = (1,0…1,3)Iaном
при этом ток переключений I2 должен быть не меньше тока нагрузки, соответствующего статическому моменту сопротивления нагрузки МС, на вал двигателя. Для двигателей специального назначения, с тяжелыми условиями работы, например двигателей краново-металлургических серий, указанные значения токов могут быть увеличены.
Запуск ЭПТ с последовательным возбуждением
Особенностью применения для пуска двигателей постоянного тока такой схемы является последовательное подключение к мотору переменного сопротивления и катушки возбуждения.
В этом случае, как и в предыдущем, по цепи обеих катушек будет протекать ток одинакового номинала. Подобный метод характеризуется неплохими пусковыми характеристиками, но при условии, что вал электродвигателя в этот момент будет находиться подл нагрузкой. И ещё одна особенность ЭПТ с последовательным возбуждением: частота вращения вала в ходе пуска будет регулироваться в зависимости от нагрузки. Подобная схема идеально подходит для электротранспорта – трамваев, троллейбусов, с некоторыми модификациями – на поездах с электротягой.
Принципиальная схема пуска ЭПТ с последовательным возбуждением:
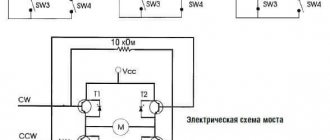
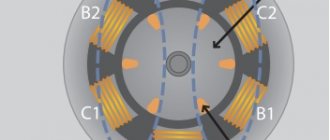
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Пуск ЭПТ с независимым возбуждением
Еще один способ пуска двигателей постоянного заключается в подключении ЭПТ в цепь посредством запитывания последней от независимого источника питания.
В приведенной в качества примера схеме катушка и сопротивление возбуждения запитываются отдельно от обмоток мотора. В цепи обмотки двигателя присутствует регулировочный реостат.
Такая реализация также требует наличия нагрузки на валу в момент пуска, в противном случае произойдет неконтролируемое повышение оборотов, чреватое поломкой мотора.
Классификация
Все трехфазные электродвигатели можно разбить на две группы:
Синхронные. Вращаются со скоростью постоянного магнитного поля. Для повышения мощности, ротор изготовляется по принципу трансформатора – имеет обмотки и сердечник. Напряжение подается через угольные щетки на кольца коллектора (контакты), закрепленного на валу, а уж потом – на катушки ротора.
Асинхронные, с короткозамкнутым ротором. Вращательный импульс идет от возбуждения катушек статора. Короткозамкнутые витки выполнены в виде беличьего колеса. Ротор вращается со скоростью ниже, чем электромагнитное поле статора. Отсюда и его название.
Пуск путем изменения питающего напряжения
Одной из самых сложных считается схема снижения пусковой нагрузки с применением управляемого выпрямителя или, как вариант, генератора постоянного напряжения, на плечи которого и ложится задача снижения питающего номинала по току.
В принципе с этой задачей справляется и реостат, но для электродвигателей повышенной мощности КПД реостата резко снижается. Использование отдельной микросхемы для изменения питающего напряжения позволяет снизить потери.
Вариант с генератором или выпрямителем используется на эл. моторах повышенной мощности. У него имеется еще один плюс: возможность реверсирования, которое реализуется изменением направления протекания тока в якоре.
Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств
В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :