Двигатели переменного тока получили наибольшую популярность среди всех существующих видов электроприводов. В чем же их преимущества? Каковы главные принципы работы? Обо всем подробно поговорим ниже.
Двигатель переменного тока
Двигатели переменного тока понадобились примерно в середине XIX века, когда началось массовое внедрение осветительных сетей с одной фазой. Первым приводом переменного тока по праву считается синхронный двигатель на основе постоянных магнитов, который собрал Чарльз Уинстон в 1841 году.
Никола Тесла
Пусковой момент у таких двигателей отсутствовал, поэтому на практике стали применять лишь машины, созданные Томсоном и Сименсом уже 1884-1885 годах. В это же время были созданы двигатели намного большей мощности. Это связано с математическим формулированием концепции магнитного поля, которое вращается (заслуга Галилео Феррариса). Никола Тесла смог реализовать концепцию в своих синхронных и асинхронных многофазных приводах. Эти агрегаты и были запущены в массовое производство.
Существует три основных вида электродвигателей переменного тока. Что это за агрегаты и каковы их различия? Об этом поговорим ниже.
Общие сведения об МПТ
Сегмент МПТ или электромеханических преобразователей можно условно разделить на однофазные и трехфазные системы. Также на базовом уровне выделяют асинхронные, синхронные и коллекторные устройства, при этом общий принцип действия и конструкционное исполнение у них имеет много схожего. Данная классификация машин переменного тока носит условный характер, поскольку современные станции электромеханического преобразования частично задействуют рабочие процессы от каждой группы устройств.
Как правило, в основе МПТ находится статор и ротор, между которыми предусматривается воздушный зазор. Опять же, независимо от типа машины, рабочий цикл строится на вращении магнитного поля. Но если в синхронной установке движение ротора соответствует направлению силового поля, то в асинхронной машине ротор может двигаться в другом направлении и с разными частотами. Это различие обуславливает и особенности применения машин. Так, если синхронные могут выступать и в качестве генератора, и как электромеханический двигатель, то асинхронные в основном используют как двигатели.
Что касается количества фаз, то выделяют одно- и многофазные системы. Причем, с точки зрения практического использования, заслуживают внимание представители второй категории. Это по большей части трехфазные машины переменного тока, в которых функцию энергоносителя как раз выполняет магнитное поле. Однофазные же устройства ввиду эксплуатационной непрактичности и крупных размеров постепенно выходят из практики применения, хотя в некоторых сферах решающим фактором их выбора является низкая стоимость.
Асинхронный двигатель
Первый асинхронный агрегат был изобретен инженером Михаилом Осиповичем Доливо-Добровольским. Двигатель был трехфазным и имел короткозамкнутый тип ротора.
Это было началом переворота в промышленности всех стран мира.
«Асинхронный» в названии говорит о том, что магнитное поле в статоре двигателя всегда вращается с большей частотой, чем у ротора.
Устройство
Основные элементы – статор и ротор.
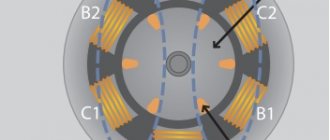
Форма статора цилиндрическая, саму деталь собирают из стальных листов. В пазы статора укладывают обмотку. Последнюю делают из специального обмоточного провода. Ось каждой обмотки в статоре сдвинута на 120° относительно всех других. Существует два типа соединения концов обмоток: треугольник и звезда. Выбор типа зависит от напряжения в сети.
В таком виде двигателя бывают две разновидности ротора: короткозамкнутые и фазные.
Короткозамкнутый ротор
Короткозамкнутые роторы тоже собирают из стальных листов. В пазы заливают расплавленный алюминий, который образует некие стержни. Их накоротко замыкают торцевые кольца. Эту конструкцию еще называют «беличья клетка». Она и является короткозамкнутой обмоткой якоря (ротора).
Фазный ротор
В фазном роторе присутствует трехфазная обмотка, почти такая же, как в статоре. Ее концы соединяют по схеме звезды, а те, что остаются свободными, подводят к кольцам. К ним также подключены щетки, которые позволяют вводить резистор. Он помогает изменить активное сопротивление в цепи якоря. Это уменьшает большие пусковые токи.
Принцип работы
Магнитное поле статора взаимодействует с токами, которые наводит это самое поле в роторе. При этом вращение возникнет только тогда, когда есть определенная разница в частоте вращения магнитных полей. В этом и заключается основополагающий принцип работы асинхронного электродвигателя.
Отличия от машин постоянного тока
Принципиальная конструкционная разница заключается в расположении обмотки. В системах переменного тока она охватывает статор, а в машинах постоянного тока – ротор. В обеих группах электродвигатели различаются по типу возбуждения тока – смешанные, параллельные и последовательные. Сегодня машины переменного и постоянного тока используются в промышленности, сельском хозяйстве и в бытовой сфере, однако первый вариант более привлекателен по своим эксплуатационным качествам. Генераторы и двигатели переменного тока выигрывают за счет более технологичной конструкции, надежности и высокой энергетической отдачи.
Применение устройств, работающих на постоянном токе, распространено в сферах, где на первый план выходят требования к точности регулирования рабочих параметров. Это могут быть тяговые механизмы транспорта, обрабатывающие станки и сложные измерительные приборы. В плане производительности машины постоянного и переменного тока имеют высокий КПД, но с разными возможностями технико-конструкционной подстройки под конкретные условия применения. Работа с постоянным током дает больше возможностей для управления частотой вращения, что важно при обслуживании серводвигателей и шаговых моторов.
Введение
Электродвигатели переменного тока — это электрические машины, которые преобразуют электрическую энергию в механическую. Они также являются наиболее совершенным и распространенным типом привода для машин и механизмов, которые преобразуют электрическую энергию в механическую.
Электродвигатели основаны на процессе электромагнитной индукции, который происходит при движении токопроводящей среды в магнитном поле.
В качестве токопроводящей среды обычно используется обмотка, состоящая из достаточно большого количества проводников, которые соответствующим образом соединены друг с другом. Магнитное поле в двигателе генерируется либо постоянными магнитами, либо обмотками возбуждения, которые протекают токами. Электродвигатели являются реверсивными, т.е. в генераторном режиме они могут преобразовывать электрическую энергию в механическую и наоборот.
Электродвигатели состоят из защитного корпуса, содержащего неподвижный полый цилиндрический статор, состоящий из отдельных изолированных пластин из электрической (магнитной) стали. Обмотки для возбуждения, изготовленные из медной проволоки, расположены в пазах на внутренней стороне статора. Внутри статора находится подвижный ротор, вращающийся на валу, который также состоит из стальных пластин, которые также изолированы друг от друга термостойким лаком. Медные обмотки расположены в пазах ротора. Обмотка статора подключена к источнику переменного тока.
Асинхронные двигатели делятся на синхронные и асинхронные в зависимости от соотношения скорости и частоты.
Асинхронные двигатели имеют номинальный режим работы, соответствующий непрерывному, короткому, повторяющемуся короткому или прерывистому режиму работы. Электродвигатели также имеют номиналы.
При изготовлении и подборе электродвигателей большое значение имеют условия эксплуатации и климатические условия, в зависимости от типа используемых электродвигателей, которые имеют конструктивные особенности, делающие их пригодными для эксплуатации в различных условиях.
При выборе электродвигателя необходимо учитывать его КПД и потери электроэнергии в проводниках, питающих двигатель.
Двигатели переменного тока необходимы для удовлетворения требований промышленного производства. Они используются в большинстве электрических приводов. Синхронные электродвигатели используются, например, в качестве двигателей в крупных установках, таких как поршневые компрессоры, воздушные каналы, гидравлические насосы и т.д.
Асинхронные двигатели используются также в промышленности, например, для привода универсальных крановых систем, а также различных грузовых лебедок и другого оборудования, необходимого в производстве.
Все эти вопросы требуют дальнейшего осмысления и изучения.
Поэтому цель диссертации должна быть сформулирована.
Тема диссертации — асинхронные электродвигатели переменного тока.
Для достижения этой цели необходимо решить следующие задачи:
- Анализ основной информации об асинхронных электродвигателях переменного тока и их назначении;
- изучение ключевых показателей;
- описание того, как это работает;
- Спецификация ценовой характеристики.
Цель и задачи диссертации определили выбор ее структуры. Статья состоит из введения, пяти глав, заключения и списка литературы, использованной при написании статьи.
Наконец, подытоживаются важнейшие результаты дипломной работы.
Устройство асинхронной МПТ
Для технической основы данного устройства в виде ротора и статора используется листовая сталь, которую перед сборкой покрывают изоляционным масляно-канифольным слоем с обеих сторон. В машинах малой мощности сердечник может выполняться из электрической стали без дополнительного покрытия, поскольку изолятором в данном случае выступает естественный оксидный слой на металлической поверхности. Статор фиксируется в корпусе, а ротор на валу. В асинхронных машинах переменного тока большой мощности сердечник ротора может крепиться и на ободе корпуса втулкой, насаженной на вал. Непосредственно вал должен вращаться на подшипниковых щитах, которые также фиксируются к основе корпуса.
Внешние поверхности ротора и внутренние поверхности статора изначально обеспечиваются пазами для размещения проводников обмотки. У статора машин переменного тока обмотка чаще выполняется трехфазной и подключается к соответствующей сети на 380 В. Ее также называют первичной. Аналогично выполняется и обмотка ротора, окончания которой обычно формируют соединение в конфигурации звезды. Предусматриваются и контактные кольца, через которые дополнительно может подключаться реостат для регулировки или трехфазный пусковой элемент.
Важно отметить и параметры воздушного зазора, который выполняет функцию демпферной зоны, снижающей шум, вибрации и нагрев при работе устройства. Чем габаритнее машина, тем больше должен быть зазор. Его величина может варьироваться от одного до нескольких миллиметров. Если конструкционно невозможно оставить достаточно места для воздушной зоны, то предусматривается система дополнительного охлаждения установки.
Устройство
Машина, работающая и на постоянном, и на переменном токе, состоит из двух частей:
- неподвижной — индуктора или статора;
- вращающейся внутри нее — якоря или ротора.
Каждый узел состоит из сердечника и обмотки, размещенной в его пазах. Отличие машин Iпост и Iпер. состоит в порядке подачи тока: в первом случае – на обмотку вращающейся части, во втором – неподвижной.
Еще одна особенность: статорные и роторные сердечники набирают из отдельных изолированных листов электротехнической стали, что препятствует возникновению в них вихревых токов.
Понятия «индуктор» и «якорь» относятся к машинам постоянного тока.
Принцип работы асинхронной МПТ
Трехфазную обмотку в данном случае подключают к симметричной сети с трехфазным напряжением, в результате чего в воздушном зазоре формируется магнитное поле. Относительно обмотки якоря принимаются специальные меры для достижения гармонического пространственного распределения поля для демпферного зазора, что образует систему вращающихся магнитных полюсов. Согласно принципу действия машины переменного тока, на каждом полюсе формируется магнитный поток, который пересекает контуры обмотки, тем самым провоцируя генерацию электродвижущей силы. В трехфазной обмотке индуцируется трехфазный ток, обеспечивающий вращающий момент двигателя. На фоне взаимодействия тока ротора с магнитными потоками происходит формирование электромагнитной силы на проводниках.
Если ротор под действием внешней силы приводится в движение, направление которого соответствует направлению потоков магнитного поля машины переменного тока, то ротор начнет обгонять темпы вращения поля. Это происходит в тех случаях, когда частота вращения статора превосходит номинальную синхронную частоту. В то же время будет изменено направление движения электромагнитных сил. Таким образом формируется тормозящий момент с обратным действием. Данный принцип работы позволяет использовать машину и в качестве генератора, работающего в режиме отдачи активной мощности в сеть.
Принцип работы
Электрические машины могут выступать в роли:
- генератора. Установка производит ток, обусловленный явлением электромагнитной индукции: изменения магнитного потока, пересекающего проводник, приводит к возникновению в нем ЭДС;
- двигателя. Электромагнитное воздействие со стороны статора заставляет подвижную составляющую вращаться.
Важное отличие от устройств Iпост: в режиме двигателя вращается магнитное поле, создаваемое статором. Это обусловлено характером Iпер. (периодическое изменение величины и направления) и расположением катушек обмотки.
По типу питания электрические машины делятся на два вида:
- однофазные. Статорные катушки разнесены на угол в 1800, вследствие чего при протекании в них Iпер. формируется пульсирующее магнитное поле. Его можно представить как сумму двух полей, вращающихся в противоположном направлении. Наличия пульсирующего поля для обращения ротора недостаточно, но если тому придать такое движение извне, он продолжит вращение в ту же сторону. Это обусловлено тем, что за счет электромагнитного взаимодействия подвижный элемент гасит ту составляющую пульсирующего магнитного поля, что направлена против его вращения. В результате действующим остается только одно вращающееся магнитное поле, оно и увлекает ротор за собой. На ранних этапах ротор раскручивали вручную, сегодня для этого применяют пусковую обмотку, шунтирование или запуск через конденсатор;
- трехфазные. Обмотки фаз А, В и С разносят на треть периода (в однополюсной машине это 120 градусов), вследствие чего из-за разности токов в фазах результирующее магнитное поле как бы вращается в одну сторону. Очевидно, что за период оно совершит один оборот, то есть при частоте тока 50 Гц поле вращается со скоростью 3000 об/мин. Если на роторе установить электромагнит с двумя парами полюсов, а на статоре — 6 равноудаленных катушек, подключенных к фазам в последовательности А – В – С – А – В – С, то скорость вращения поля сократится вдвое: до 1500 об/мин. Она равна W = (60*f)/n, где f — частота электрического тока, n — число пар полюсов и катушек, подключенных к одной фазе.
Сказанное относится как к двигателю, так и к генератору. То есть для создания 3-фазного тока частотой 50 Гц при наличии 30 пар полюсов ротор требуется вращать со скоростью всего 100 об/мин вместо 3000, что важно для роторов гидроэлектростанций.
Сколько бы ни было катушек, все они объединены в 3 однофазные группы, поэтому статор 3-фазной электрической машины всегда имеет 6 выводных клемм. В группах катушки подключаются параллельно или последовательно.
Устройство и принцип действия синхронных МПТ
В части исполнения и расположения статора синхронная машина похожа на асинхронную. Обмотка называется якорем и выполняется с тем же количеством полюсов, как и в предыдущем случае. У ротора предусматривается обмотка возбуждения, энергетическое снабжение которой обеспечивают контактные кольца и щетки, подключенные к источнику постоянного тока. Под источником подразумевается маломощный генератор-возбудитель, устанавливаемый на одном валу. В синхронной машине переменного тока обмотка выполняет функцию генератора первичного магнитного поля. В процессе проектирования конструкторы стремятся создавать условия для того, чтобы индукционное распределение поля возбуждения на поверхностях статора было как можно ближе к синусоидальному.
При повышенных нагрузках обмотка статора формирует магнитное поле с вращением в направлении ротора с аналогичной частотой. Таким образом образуется единое поле вращения, при котором поле статора будет оказывать воздействие на ротор. Данное устройство машин переменного тока позволяет их использовать как электродвигатели, если изначально обеспечивается подводка трехфазного тока к синхронной обмотке. Такие системы создают условия для координированного вращения ротора с частотой, соответствующей полю статора.
Электрические машины переменного тока
Электрические машины переменного тока. Назначение, область применение, устройство принцип действие машин.
Машины переменного тока бывают двух видов. Это синхронные машины и асинхронные. У синхронных машин скорость вращения ротора строго зависит от частоты переменного тока. Можно сказать скорость вращения «синхронна» с частотой тока. Не трудно догадаться, что у асинхронных машин частота вращения в общем случае зависит от нагрузки на валу, а не от частоты питающего тока. Кроме деления на синхронные и асинхронные электрические машины еще делятся по назначению. Это могут быть генераторы. То есть такая машина, которая преобразует механическую энергию вращения в переменный электрический ток. Машина, которая преобразует электрическую энергию в механическую называется двигателем. Также существует еще один класс электрических машин. Они преобразуют электрическую энергию, тоже в электрическую, но другой частоты или напряжения. Синхронной машиной переменного тока называют такую машину, в которой: основное магнитное поле то есть поле статора создается постоянным током. В частном случае это может быть даже постоянный магнит. А вращение ротора происходит с частотой изменения тока.
Формула 1 — зависимость частоты вращения ротора синхронной машины от частоты переменного тока. где n это частота, с которой вращается ротор, измеряется в оборотах в минуту. То есть, сколько полных оборотов совершит ротор за одну минуту. f частота питающего переменного тока p количество пар полюсов у магнитной системы машины
В настоящее время асинхронные машины используются в основном в режиме двигателя. Машины мощностью больше 0.5 кВт обычно выполняются трёхфазными, а при меньшей мощности – однофазными.
Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5 кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Широкое применение асинхронных двигателей объясняется их достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания. Неподвижная часть машины называется статор
, подвижная –
ротор
. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается
трёхфазная обмотка
(3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами c
1,
c
2,
c
3, концы –
c
4,
c
5,
c
6.
Начала и концы фаз выведены на клеммник, закреплённый на станине. Обмотка статора может быть соединена по схеме звезда или треугольник. Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с U
л=660В по схеме звезда или в сеть с
U
л=380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
Сердечник ротора
набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов:
короткозамкнутая
и
фазная
. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).
Короткозамкнутая обмотка ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
Однафазные асинхронные двигатели.
Асинхронный двигатель является простейшей из электрических машин. Как и любая электрическая машина, он имеет две основные части: статор и ротор.
Статор (рис. 6.1) состоит из чугунной станины 1, в которой закреплен магнитопровод 2 в виде полого цилиндра. Между станиной и сердечником обычно оставляют зазор, через который проходит охлаждающий воздух. Для уменьшения потерь на вихревые токи магнитопровод набирают из тонких (0,5 мм) листов электротехнической стали, изолированных друг от друга лаком.
Рис. 6.1. Конструкция статора асинхронного двигателя:
1 — станина; 2 — сердечник; 3 — обмотка;
4 — лапа; 5 — прокладка
В пазы, вырезанные по внутренней окружности статора, укладывают обмотку 3. У двухполюсной машины обмотка статора состоит из трех катушек, сдвинутых на углы 120°, у четырехполюсной — из шести катушек, сдвинутых на 60°, у шестиполюсной — из девяти катушек и т. д. Обмотку в пазах статора закрепляют клиньями.
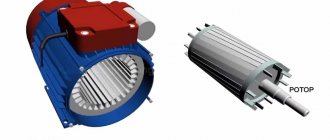
Ротор также набирают из тонких листов электротехнической стали. В пазах ротора размещают обмотку, которая может быть короткозамкнутой или фазной (рис. 6.2). Короткозамкнутая обмотка типа
Рис. 6.2. Общий вид ротора асинхронного двигателя с коротко- замкнутой (а) и фазной (б) обмотками
«беличья клетка» изображена на рис. 6.3. Она состоит из толстых проводящих стержней (медь, алюминий), соединенных по торцам медными или алюминиевыми кольцами. Короткозамкнутая обмотка не изолируется от ротора. Иногда ее изготовляют заливкой расплавленного алюминия в пазы ротора.
Контактные кольца1, изготовленные из латуни или меди, укрепляют на валу двигателя с помощью изолирующих прокладок. Щеткодержатель с угольными или медно-графитовыми щетками 2 крепят на подшипниковом щите.
Рис. 6.3. Общий вид коротко- замкнутой обмотки типа «беличья клетка»
Рис. 6.4. Схема соединения фазной обмотки ротора с регулировочными реостатами:
1 —’контактные кольца, 2— щетки; 3 — реостаты
Общий вид асинхронного двигателя показан на рис. 6.5.
Рис. 6.5. Общий вид асинхронного двигателя с короткозамкнутой (а) и фазной (б) обмотками ротора
Принцип действия асинхронного двигателя.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля и основных законов электротехники.
При включении двигателя в сеть трехфазного тока в статоре образуется вращающееся магнитное поле, силовые линии которого пересекают стержни или катушки обмотки роторо. При этом, согласно закону электромагнитной индукции, в обмотке ротора индукциреутся ЭДС, пропорциональная частоте пересечения силовых линий. Под действием индуцированной ЭДС в короткозамкнутом роторе возникают значительные токи.
В соответствии с законом Ампера на проводники с током, находящиеся в магнитном поле, действуют механические силы, которые по принципу Ленца стремятся устранить причину, вызывающую индуцированный ток, т. е. пересечение стержней обмотки ротора силовыми линиями вращающегося поля. Таким образом, возникшие механические силы будут раскручивать ротор в направлении вращения поля, уменьшая скорость пересечения стержней обмотки ротора магнитными силовыми линиями.
Достичь частоты вращения поля в реальных условиях ротор не может, так как тогда стержни его обмотки оказались бы неподвижными относительно магнитных силовых линий и индуцированные токи в обмотке ротора исчезли бы. Поэтому ротор вращается с частотой, меньшей частоты вращения поля, т. е. несинхронно с полем, или асинхронно.
Если силы, тормозящие вращение ротора, невелики, то ротор достигает частоты, близкой к частоте вращения поля. При увеличении механической нагрузки на валу двигателя частота вращения ротора уменьшается, токи в обмотке ротора увеличиваются, что приводит к увеличению вращающего момента двигателя. При некоторой частоте вращения ротора устанавливается равновесие между тормозным и вращающим моментами.
Синхронный двигатель
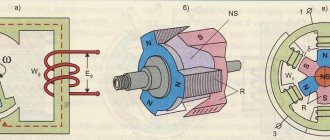
Устройство статора синхронного двигателя аналогично устройству статора асинхронного двигателя. Ротор синхронного двигателя представляет собой электромагнит или постоянный магнит (рис. 6.6).
Принцип работы синхронного двигателя поясняется рис. 6.7. Внутри магнита N1 S1 помещен магнит NS. Если магнит N1 S1 вращать, то он потянет за собой магнит NS. В стационарном режиме частоты вращения обоих магнитов одинаковы.
К валу магнита NS можно приложить механическую нагрузку. Чем больше эта нагрузка, тем больше угол отставания оси магнита NS от оси магнита NiSi. При некоторой нагрузке силы притяжения между магнитами будут преодолены и ротор остановится.
В реальном двигателе поле магнита N1 S1 заменено вращающимся магнитным полем статора; при этом ротор либо вращается синхронно с магнитным полем статора, отставая на угол , либо останавливается (выпадает из синхронизма) при перегрузке. Таким образом, независимо от нагрузки ротор всегда вращается с постоянной частотой, равной частоте вращения магнитного поля статора:
Рис. 6.6. Схематическое изображение Рис. 6.7. К пояснению принципа синхронного двигателя работы синхронного двигателя
Постоянство частоты вращения — важное достоинство синхронного двигателя. Строгое постоянство частоты вращения требуется во многих областях техники, например при записи и воспроизведении звука. Недостаток синхронного двигателя — трудность пуска: для пуска нужно раскрутить ротор в сторону вращения поля статора. Для этого чаще всего применяют специальную короткозамкнутую обмотку, вделанную в ротор. В момент пуска двигатель работает как асинхронный. Когда частота вращения ротора приближается к частоте вращения поля статора, ротор входит в синхронизм и двигатель работает как синхронный. Короткозамкнутая обмотка при этом оказывается обесточенной, так как частота вращения ротора равна частоте вращения поля статора и стержни обмотки ротора не пересекаются магнитными силовыми линиями.
В настоящее время существует тенденция замены на подвижных объектах (корабли, самолеты, автомобили) электрических цепей постоянного тока цепями переменного тока повышенной частоты (200, 400 Гц и выше). Возможность использования бесколлекторных машин переменного тока, трансформаторов и магнитных усилителей позволяет повысить надежность работы цепи, а также уменьшить габариты и массу машин и аппаратов.
При оборудовании объекта сетью переменного тока широкое применение находит электропривод на переменном токе. Разработаны схемы с асинхронными и синхронными двигателями, которые позволяют выполнить все операции, осуществляемые ранее двигателями постоянного тока.
Преимущества асинхронных двигателей особенно заметны тогда, когда по условиям работы привода нет необходимости в плавном регулировании частоты вращения в широких пределах и больших пусковых моментах (привод насосов, вентиляторов и др.).
Синхронные двигатели особенно удобны для привода роторов гироскопов. В тех случаях, когда гироскоп используют для особо точных измерений (например, в баллистических ракетах), приводом ротора гироскопа служит синхронный двигатель. При этом частота вращения ротора зависит только от конструкции двигателя и частоты питающего тока, которую можно стабилизировать с очень высокой степенью точности.
Синхронный генератор
Ротор синхронных машин вращается синхронно с вращающимся магнитным полем (отсюда их название). Поскольку частоты вращения ротора и магнитного поля одинаковы, в обмотке ротора не индуцируются токи. Поэтому обмотка ротора получает питание от источника постоянного тока.
Устройство статора синхронной машины (рис. 6.8) практически не отличается от устройства статора асинхронной машины.
Рис 6.8. Общий вид статора синхронного генератора.
Рис 6.9. Общий вид неявнополюсного ротора синхронного генератора.
Роторы синхронных генераторов могут быть явнополюсными (рис. 6.9) и неявнополюсными (рис. 6.10). В первом случае синхронные генераторы приводятся в действие тихоходными турбинами гидроэлектростанций, во втором — паровыми или газовыми турбинами теплоэлектростанций.
Рис. 6.10. Общий вид неявнополюсного ротора синхронного генератора
Используют различные способы возбуждения синхронных генераторов. Широкое распространение получил синхронный генератор с машинным возбудителем, представляющим собой генератор постоянного тока, расположенный на одном валу с синхронным генератором. Машинный возбудитель приводится в действие от того же первичного двигателя, что и синхронный генератор. Выходные зажимы возбудителя через щетки и кольца подсоединены к обмотке ротора синхронного генератора. Напряжение синхронного генератора можно регулировать реостатом в цепи обмотки возбуждения возбудителя, что удобно и энергетически выгодно, так как в этой обмотке протекают сравнительно небольшие токи.
Находят также применение генераторы с самовозбуждением через полупроводниковые или механические выпрямители.
Из характеристик синхронного генератора наибольший практический интерес представляют внешние характеристики, выражающие зависимость напряжения на зажимах генератора от тока нагрузки при неизменных значениях тока возбуждения, частоты и коэффициента мощности.
Явнополюсные и неявнополюсные синхронные машины
Главным отличием явнополюсных систем является присутствие в конструкции выступающих полюсов, которые крепятся к специальным выступам вала. В типовых механизмах фиксация выполняется с помощью Т-образных хвостовых крепежей к ободу крестовины или валу через втулку. В устройстве машин переменного тока малой мощности эта же задача может решаться болтовыми соединениями. В качестве материала обмотки используется полосовая медь, которую наматывают на ребро, изолируя специальными прокладками. В наконечниках с полюсами в пазах размещаются стержни обмотки для пуска. В этом случае применяется материал с высоким удельным сопротивлением наподобие латуни. Контуры обмотки по торцам приваривают к короткозамыкающим элементам, образуя общие кольца для короткого замыкания. Явнополюсные машины с силовым потенциалом на 10-12 кВт могут выполняться в так называемой обращенной конструкции, когда якорь вращается, а полюса индуктора сохраняют неподвижное состояние.
У неявнополюсных машин конструкция базируется на цилиндрическом роторе, выполняемом из стальной поковки. В роторе присутствуют пазы для формирования обмотки возбуждения, полюса которой рассчитываются на высокие частоты вращения. Однако применение такой обмотки в электрических машинах с переменным током большой мощности невозможно из-за высокой степени износа ротора в жестких условиях эксплуатации. По этой причине даже в установках средней мощности для роторов применяют высокопрочные компоненты из цельных поковок на основе хромоникельмолибденовых или хромоникелевых сталей. В соответствии с техническими требованиями к прочности, максимальный диаметр рабочей части у ротора неявнополюсной синхронной машины не может быть выше 125 см. Это объясняет необычный форм-фактор ротора с удлиненным корпусом, хотя и по данному параметру есть ограничения, связанные с увеличением вибраций у слишком длинных элементов. Предельная длина ротора составляет 8,5 м. К неявнополюсным агрегатам, которые используются в промышленности, можно отнести различные турбогенераторы. С их помощью, в частности, связывают рабочие моменты паровых турбин с тепловыми энергостанциями.
Ключевые показатели
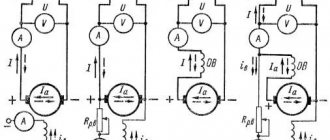
При выборе электродвигателя переменного тока такие функции, как
Их эффективность, определяемая как отношение полезной мощности, которую они используют, к общей мощности, подаваемой на данный прибор.
Коэффициент мощности линии электропередачи, называемый коэффициентом мощности или значением «косинусного фи». Этот коэффициент равен отношению активной мощности электрической цепи к общей подаваемой в нее мощности. Величина косинусного заряда зависит от устройства и принципа действия электрооборудования, электрических сетей и систем. Чем выше значение косинуса, тем ближе оно к 1, тем эффективнее и экономичнее расходуется электричество. Это значение не должно быть ниже 0,9.
При оценке электродвигателей используются также их рабочие характеристики, т.е. зависимость параметров двигателя от мощности вала. Так и есть: Скорость, крутящий момент, характеристика коэффициента мощности, КПД.
Также существуют следующие особенности, которые характеризуют этот тип продукции.
Номинальный режим работы — это режим работы, на который рассчитан двигатель.
Номинальные параметры электрической машины, характеризующие номинальный режим работы машины, относятся к работе машины на высоте до 1000 м над уровнем моря и при температуре газообразной охлаждающей среды до +40 градусов Цельсия и охлаждающей воды до +30 градусов.
Номинальные режимы работы электрических машин, включающие длинный, короткий, повторный и прерывистый режимы.
Номинальная мощность — эффективная механическая мощность на валу, выраженная в Вт, кВт, МВт, указана на заводской табличке двигателя.
Номинальное напряжение — соответствует номинальному режиму работы электродвигателя.
Номинальное напряжение возбуждения двигателя.
Номинальный ток электродвигателя — это ток, соответствующий номинальному режиму работы.
Номинальный ток возбуждения двигателя — это ток возбуждения, соответствующий номинальному режиму работы.
Номинальная скорость электрической машины.
Изменение номинальной скорости электродвигателя.
К параметрам, необходимым для характеристики электродвигателей, относятся также: рабочая температура отдельных частей двигателя, коэффициент инерции, начальный пусковой ток, начальный пусковой момент, минимальный крутящий момент, максимальный крутящий момент, максимально допустимое превышение температуры частей двигателя, высота оси вращения электродвигателя.
Технико-экономические показатели — размер, вес и стоимость электродвигателя — зависят от его основных размеров — внутреннего диаметра сердечника арматуры и его длины. Основные размеры, в свою очередь, зависят от мощности двигателя, частоты вращения и основных электромагнитных нагрузок в номинальном режиме работы — эжекции в воздушном зазоре и линейной нагрузки.
Весь набор параметров позволяет охарактеризовать данный вид продукции.
Особенности вертикальных гидрогенераторов
Отдельный класс явнополюсных синхронных МПТ, обеспеченных вертикальным валом. Такие установки подключаются к гидравлическим турбинам и подбираются под мощности обслуживаемых потоков по частоте вращения. Большинство машин переменного тока данного типа являются тихоходными, но при этом имеют большое количество полюсов. Среди ответственных рабочих компонентов вертикального гидрогенератора можно отметить упорный подшипник и подпятник, на который приходится нагрузка от вращающихся частей движка. На подпятник, в частности, накладывается и давление от потоков воды, которая действует на турбинные лопасти. Кроме того, для остановки вращения предусматривается тормоз, а в рабочей структуре также присутствуют направляющие подшипники, воспринимающие радиальные усилия.
В верхней части машины наряду с гидрогенератором могут размещаться вспомогательные агрегаты – например, возбудитель генератора и регулятор. К слову, последний представляет собой самостоятельную машину переменного тока с обмоткой и полюсами на постоянных магнитов. Данная установка обеспечивает питание двигателя для обеспечения функции автоматического регулятора. В больших вертикальных гидрогенераторах возбудитель может заменяться синхронным генератором, который вместе с возбудительными узлами и ртутными выпрямителями обеспечивает энергоснабжение силовых устройств, обслуживающих рабочий процесс основного гидрогенератора. Конфигурация машины с вертикальным валом также используется в качестве приводного механизма мощных гидравлических насосов.
Список литературы
- Атабеков В.Б. Ремонт трансформаторов, электрических машин и оборудования. — М.: Средняя школа, 1988.
- Брускин Д.Е. и др. Электрические машины. — М.: Высшая школа, 1983
- Инструкция по приему качества производственно-технической продукции и товаров народного потребления № П-7 от 25 апреля 1965 г.
- Николаева М.А. Сертификация товаров народного потребления. — М.: Экономика, 1997
- Общероссийский классификатор видов экономической деятельности, продукции и услуг. Том 1,2 — Москва: Приоритетное издательство, 1999.
- Основные виды промышленного оборудования, электрооборудования и приборов / Под ред. — М.: Высшая школа, 1986.
- Савичев О.П., Козачев Л.А. Оборудование промышленное: Учебник. — Л.: Издательство ЛФЭИ, 1986.
- Знание продукции промышленного оборудования: учебное пособие. Часть 2. Учебное руководство.
- Электрооборудование и приборы. — СПб : Издательство СПбГУЭФ, 1993 г.
- Экспертиза в области розничной торговли/под ред. проф. Ю.Н. Голубева: Учебник. — Санкт-Петербург: Санкт-Петербургский государственный университет экономики и финансов, 1997 г. — 235с.
- Руководство по электротехнике: в 3 т. Т.2. электротехнические устройства / под общим редактированием МЭИ В.Г. Герасимов, П.Г. Грудинский, Л.А. Жуков и др. — 6-е изд. С. и доп. — М.: Энергоиздат, 197 8.
Коллекторные МПТ
Наличие коллекторного узла в конструкции МПТ зачастую обуславливается необходимостью выполнения функции преобразования частоты вращения в электрической связи разночастотных цепей на обмотках ротора и статора. Это решение позволяет наделять устройство дополнительными эксплуатационными свойствами, в числе которых автоматическая регуляция рабочих параметров. Коллекторные машины переменного тока, которые подключаются к трехфазным сетям, получают по три щеточных пальца в каждом сегменте двойного полюсного деления. Соединение щеток между собой выполняется по параллельной схеме перемычками. В этом смысле коллекторные МПТ похожи на электродвигатели с постоянным током, но отличаются от них количеством применяемых щеток на полюсах. Помимо этого, статор в данной системе может иметь несколько дополнительных обмоток.
Замкнутая обмотка якоря при использовании коллектора с трехфазными щетками будет представлять собой трехфазную комплексную обмотку с соединением в виде треугольника. В процессе вращения якоря каждая фаза обмотки сохраняет неизменную позицию, однако секции поочередно переходят от одной фазы к другой. Если в коллекторной машине переменного тока используется шестифазный комплект щеток со сдвигом на 60° относительно друг друга, то формируется шестифазная обмотка с соединением по схеме многоугольника. На щетках многофазной машины с коллекторной группой частота тока определяется вращением магнитного потока по отношению к неподвижным щеткам. Направление вращения ротора может быть как встречным, так и согласованным.
Как изменить направление вращения ротора в электроприводе переменного тока?
Из всех машин переменного тока наиболее популярными стали асинхронные, питающиеся от напряжения 380В. Об их реверсе мы и поговорим.
Первое, что нужно знать – для осуществления реверса асинхронного двигателя хватить изменения двух фаз.
Самая распространенная схема подключения – с двумя магнитными пускателями. Для реверса двигателей постоянного тока она особенно не отличается, в нашем случае характерно использование двухполюсных пускателей, о чем говорит даже ее название: «схема реверсивного пускателя».
Реверс двигателя переменного тока
Когда с помощью кнопки «Пуск 1» включается пускатель КМ1, напряжение начинает подаваться на обмотки, при этом кнопка «Пуск 2» будет блокирована от незапланированного включения. Это происходит благодаря тому, что размыкаются нормально-замкнутые контакты КМ1. Ротор начинает вращение.
Когда пускатель КМ1 отключается с помощью кнопки «Стоп» (можно также снять напряжение), нажатием кнопки «Пуск 2» включается КМ2. Результат – прямая подача через контакты линии L2, линии L1 и L3 занимают места друг друга. Теперь блокируется уже кнопка «Пуск 1», ведь нормально-замкнутые контакты КМ2 размыкаются. Начинается вращение в противоположную сторону.
Такая схема применима ко всем асинхронным трехфазным двигателям. Простота осуществления и доступные детали – главные положительные стороны.
Зачастую реверс осуществляется благодаря эл. системам управления двигателями. Их коммутационные схемы собираются на тиристорах, пускателей нет. Тем не менее их можно установить, чтобы сделать возможным дистанционное включение/выключение в цепи.
Подключение системы импульсно-фазного управления
Устройства на тиристорах гораздо надежнее, хоть и сложнее тех, что на контакторах. В них используют импульсно-фазные и частотные системы управления. Такие устройства выполняют несколько функций: изменение направления вращения ротора в двигателе, а также регулирование частоты его вращения.
Быту иногда нужно подключить двигатель на 380В в сеть на 220В с возможностью реверса. Для этого в первую очередь нужно переподключить обмотку по другой схеме (звезда или треугольник).
Схемы подключения обмотки
Если же возникает необходимость подключения асинхронного трехфазного электропривода к сети с одной фазой, то нужно использовать конденсаторные двигатели. Конденсатор можно подключить отдельно по схеме ниже.
Для того чтобы реверс был осуществлен, контакт с сети под буквой В нужно подключить к клемме под буквой А. Для конденсатора все наоборот: отсоединяем от А и подключаем к клемме В. Для максимального удобства лучше использовать шестиконтактный тумблер.
Главная особенность современной схемы управления двигателями переменного тока – многофункциональность. Зачастую она включает в себя не только механизм, благодаря которому осуществляется реверс, но и тот, что помогает контролировать частоту вращения ротора. Такая схему начала распространяться из-за развития микропроцессоров. Микропроцессорная электроника – основа работы современных преобразователей частоты. Подобные блоки для управления переменными машинами характерен своей высокой надежностью и «приятной» ценой. Еще один весомый плюс многофункциональной системы управления – значительная экономия электроэнергии (около 40%). Электродвигателями переменного тока можно управлять, основываясь на одном из двух существующих для этого принципов. Методы перечислены в списке ниже:
- принцип вольт-частотного регулирования;
- принцип векторного управления.
При вольт-частотном (или скалярном) принципе регулирования электромотора скорость вращения вала изменяется посредством смены частоты и напряжения в статоре. Модуль напряжения тоже изменяется. Регулирующих факторов в итоге два: частота и напряжение. Они имеют одинаковое значение. Чтобы двигатель работал, важно постоянство отношения напряжения в обмотке статора и его напряжения. Другими словами, любая смена частоты должна быть синхронизирована со сменой напряжения и наоборот. КПД привода в это время не меняется.
Удобство такой схемы заключается в том, что возможна одновременная работа с несколькими устройствами. Это критически важно во время работы сложных технологических линий, к примеру, во время контроля того, как движется конвейер. С вольт-частотным регулированием максимально возможный диапазон 1/40. Этого хватит, чтобы решить почти все задачи производства.
Из отрицательных качеств схемы можно упомянуть невозможность контроля вращающего момента и режима позиционирования. Основная область применения данного способа управления – конвейеры, насосы, вентиляторы.
При векторном управлении электромотором можно производить не только регулирование описанное выше, но и работу с магнитным потоком. Основа системы – представление основных параметров двигателя как векторов в пространстве. Микросхемы векторного управления созданы для контроля и изменения как амплитуды, так и фазы электротока в статоре. Это фактически меняет его вектор. Результат – возможность контроля вращающего момента электромотора.
Чтобы управление фазами тока было эффективным, нужно обязательно понимать, в каком состоянии он находится в конкретном моменте. Эту проблему решает датчик, который отслеживает положение ротора или система, определяющая его положение по двум параметрам: напряжению и токам в обмотках статичной части двигателя. При наличии устройства, контролирующего обратную связь, ее можно регулировать в диапазоне 1-1000 с точностью до сотых долей процента.
Применение МПТ
Сегодня МПТ используются всюду, где в том или ином виде требуется генерация механической или электрической энергии. Крупные производительные агрегаты применяются в обслуживании инженерных систем, энергетических станций и подъемно-транспортных узлов, а маломощные – в обычной бытовой технике от вентиляторов до насосов. Но в обоих случаях назначение машин переменного тока сводится к выработке энергетического потенциала в достаточном объеме. Другое дело, что имеют принципиальное значение конструкционные отличия, реализация внутренней конфигурации статора и ротора, а также управляющая инфраструктура.
Хотя общее устройство МПТ на протяжении длительного времени сохраняет один и тот же набор функциональных компонентов, повышающиеся требования к эксплуатации таких систем заставляют разработчиков вносить дополнительные органы контроля и управления. На современном этапе технологического развития особенно в контексте применения машин переменного тока в производственной сфере эксплуатацию подобных двигателей и генераторов сложно представить без высокоточных средств регуляции рабочих параметров. Для этого используются самые разные способы управления – импульсный, частотный, реостатный и т.д. Внедрение автоматики в регулирующую инфраструктуру также является характерной чертой современной эксплуатации МПТ. Управляющая электроника подключается к силовой установке с одной стороны, а с другой – к программным контроллерам, которые по заданному алгоритму дают команды на установку конкретных параметров работы механизма.
Ценовая спецификация
До 1996 года цены на электродвигатели росли огромными темпами, так что в 1995 году динамика цен составляла 280%, а с 1996 года рост цен значительно замедлился и составил 130%. Рост цен до 1996 года был в основном обусловлен инфляцией в России, а после того, как экономическая ситуация более или менее стабилизировалась, рост цен замедлился. Позже рост цен замедлился. В январе-марте 1997 г. темпы роста цен на продукцию машиностроения значительно замедлились. За три месяца этого года заводы, выпускающие продукцию машиностроения, увеличили цены в среднем на 3 процента. За соответствующий период прошлого года машиностроительная промышленность увеличила цены на свою продукцию на 11,3%. В целом, динамика цен в 1997 году составила 107,4%. В 1998 году тенденция к снижению цен продолжилась. Так, в первом квартале динамика цен составила 101,3%, во втором — 99,2%, однако в третьем квартале цены вновь начали расти, в основном из-за экономического кризиса, падения курса рубля и роста инфляции. В октябре 1998 года динамика цен составила 105,9%. Цены продолжали расти, что также было вызвано августовским кризисом.
В принципе, электродвигатели изготавливаются на заказ, и окончательная цена определяется при заключении договора. Более того, цена зависит от различных версий мотора (тропического, морского и т.д.), поэтому цена увеличивается. Экспортная версия также повышает цену двигателя.