С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ)3×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.
Принцип действия.
Работа данного двигателя напрямую зависит от взаимодействия магнитных полей статора и коллектора. Как мы с вами уже знаем, что в статоре и на коллекторе есть обмотки. Если подать на эти обмотки напряжение, то за счёт этого будут создаться магнитные поля. А эти магнитные поля уже и будут заставлять коллектор вращаться. Смотрите, как это показано на картинке.
Регулирование частоты вращения электродвигателей
Порядка 70% потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
- частота напряжения;
- число пар полюсов;
- величина напряжения;
- добавочное сопротивление в цепи ротора;
- вентильный каскад.
Изменяемые параметры для ДПТ:
- напряжение питания;
- сопротивление цепи обмотки якоря;
- магнитный поток.
Методы регулирования частоты вращения электродвигателя
Далее мы подробно рассмотрим эти способы и их применимость к различным типам электродвигателей.
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ. Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором). Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
- обширный диапазон регулировки;
- «жесткость» механических характеристик;
- минимум потерь «скольжения», мощности.
Недостаток — высокая стоимость (в последние годы становится менее актуально).
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором. Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки. Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
- экономичность;
- «жёсткие» механические характеристики.
Недостатки:
- ограниченное количество возможных скоростей;
- ступенчатость переключения скоростей.
Изменение питающего напряжения
Применение: асинхронные двигатели.
Изменять напряжение на статоре можно, включая в его цепь резисторы (старый и неэкономичный способ), автотрансформаторы или тиристорные регуляторы. При регулировании скорости изменением напряжения, критический момент пропорционален квадрату подводимого напряжения. Снижается устойчивость к кратковременным перегрузкам и КПД, поэтому метод предпочтителен при «вентиляторной» нагрузке. Еще один недостаток — малый диапазон регулирования.
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором. При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
- простота реализации;
- критический момент = const;
Недостатки:
- большие потери (при изменении скорости половина мощности тратится на выделение тепла);
- малый диапазон;
- «мягкие» механические характеристики.
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Смысл регулирования каскадными схемами заключается в подаче в цепь ротора добавочной ЭДС. Изменяя добавочную ЭДС ротора, мы изменяем ток ротора, а значит его момент и скорость. Создать добавочную ЭДС, помимо устройства вентильного каскада, может и ДПТ — машинно-вентильный каскад.
Достоинства:
- Минимум сопутствующей силовой и контактной аппаратуры;
- плавность регулировок;
- малая мощность управления.
Недостатки:
- стоимость;
- низкий коэффициент мощности;
- плохая устойчивость к перегрузкам.
Изменение напряжения питания якоря
Применение: любые ДПТ. Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
- плавность регулировок;
- простота пусков и торможений;
- экономичность.
Недостатки:
- необходимость трехкратного преобразования энергии→низкий КПД;
- три электрические машины в системе;
- дорогая эксплуатация.
Введение добавочного резистора в цепь якоря
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Преимущества:
- минимальные потери→экономичность;
- широкий диапазон регулирования
Недостатки:
- невозможно бесконечно уменьшать ток в обмотке возбуждения, двигатель уйдет «в разнос».
Для оформления заказа позвоните менеджерам компании Кабель.РФ® по телефону или пришлите заявку на электронную почту с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей.
Достоинства и недостатки.
Основные достоинства ДПТ:
1. Простое устройство двигателя.
2. Можно очень легко изменять частоту вращения вала.
3.За счет сильного момента очень хорошие пусковые характеристики.
4. Можно использовать как в качестве двигателя, так же и в качестве генератора.
5. По сравнению с некоторыми другими двигателями, имеет не большие размеры.
Недостатки:
1. Очень высокая цена.
2. Если подключать двигатель к переменной сети, то так же нужны выпрямительные устройства.
3. Очень часто приходится обслуживать коллекторно-щёточный узел.
4. Коллектор имеет ограниченный срок службы из-за износа.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
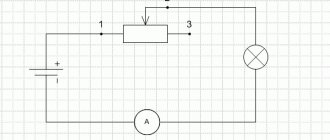
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Применение.
Двигателя постоянного тока широко применяются на различной технике. Такой, как: краны, экскаваторы, с трамваи, электрички, тепловозы, теплоходы и так далее. Ещё, такие двигателя, используют в электроинструменте. На производстве, их можно встретить на станках, где нужно регулировать частоту вращения в очень широком диапазоне.
На этом у меня всё. Статья получилась не очень объёмной, но для общего понятия вполне информативна. Если есть вопросы, то задавайте их в комментариях, жмите на кнопки социальных сетей и подписывайтесь на обновление. Пока.
С уважением Александр!
СПОСОБЫ ВОЗБУЖДЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Под возбуждением электродвигателей постоянного тока (ПТ) понимается эффект создания в них ЭДС, обеспечивающей вращение ротора. Их рабочие характеристики зависят от того, каким образом включена обмотка возбуждения (ОВ) по отношению к цепи якоря.
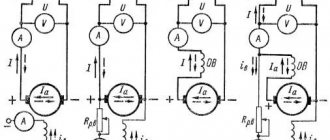
Наиболее распространены следующие схемы подключения:
- с независимым возбуждением (две обмотки не связаны одна с другой, а ОВ питается от отдельного источника);
- с параллельным возбуждением или шунтируемого типа (в них ОВ включена параллельно якорной цепочке);
- с последовательным возбуждением (ОВ включается последовательно с якорной обмоткой).
В ряде случаев, связанных с особенностями эксплуатации двигателей постоянного тока, применяется комбинированная схема включения.
Иногда ее называют «смешанной» или «компаундной» (в ней последовательное подключение совмещается с параллельным). Рассмотрим каждый из перечисленных вариантов более подробно.
Независимое возбуждение.
При этой схеме подключения обмотка возбуждения электрически не связана с катушкой якоря (рис.1). Для снижения тепловых потерь и создания необходимой величины ЭДС число витков в ней делается достаточно большим, что позволяет снизить ток возбуждения.
Регулировать ток в якоре можно посредством резистора Rдоб, включенного последовательно. Частоту вращения можно менять резистором Rрег. Возможность независимого управления параметрами двигателя относят к плюсам этой схемы.
Ее минус – необходимость использования дополнительного источника питания, что приводит к увеличению материальных издержек. Применение схемы с независимым возбуждением определяется особенностями конструкции управляемого электропривода.
Параллельное возбуждение.
Электрическая схема подключения с параллельным возбуждением в целом напоминает рассмотренную выше. Ее особенность – наличие электрической связи ОВ с якорной цепью (рис.2).
Эффективность работы двух рассмотренных схем практически одинакова. Преимущество этого способа включения в том, что в данной ситуации отпадает необходимость в дополнительном источнике питания. Ее минус – невозможность раздельной регулировки параметров электродвигателя.
Принцип работы электродвигателя с последовательным возбуждением.
Особенностью этой схемы является последовательное включение ОВ и якорной цепочки (рис.3). При таком варианте подключения ток якоря является одновременно и током возбуждения (Iя =Iв). Это вынуждает производителей оборудования наматывать ОВ проводом того же сечения, что и у якоря.
Недостаток этой схемы – в том, что скорость двигателя зависит от нагрузки на валу. При ее увеличении падение напряжения на обмотках и магнитный поток возрастают. А это приводит к сильному падению скорости вращения. При снижении нагрузки частота вращения двигателя резко возрастает и может достичь опасных значений (он может начать работать «вразнос»).
Данный вариант применяют в случаях, когда необходимо выдерживать большое пусковое усилие (момент). Или же когда двигателю предстоит работать в режиме кратковременных перегрузок. Схемы с последовательным запуском используются в тяговых двигателях (в метро, трамваях, электровозах и троллейбусах).
Принцип действия двигателя со смешанным возбуждением.
К каждому из полюсов системы со смешанным возбуждением подключено две обмотки: последовательная и параллельная (рис.4). Их допускается включать таким образом, чтобы магнитные потоки суммировались (согласное подключение), либо вычитались один из другого (встречное включение).
В зависимости от того, как соотносятся части каждого из магнитных потоков, двигатель постоянного тока со смешанным возбуждением приближаются по своим свойствам к одному из уже рассмотренных ранее вариантов.
Такие схемы применяются в ситуациях, когда необходим большой по величине пусковой момент и одновременно невозможно обойтись без регулировки частоты вращения вала при переменных нагрузках.
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы . Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Источник: servodroid.ru
Дополнительная статья ЧИТАТЬ