Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.
Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Человек в синхронном мире
Один занятой молодой человек запланировал на вечер свидание. Он очень хочет, чтобы все прошло идеально, а для этого нужно сделать несколько дел:
- разобраться с рабочими документами;
- забрать костюм из химчистки;
- съездить в цветочный магазин за букетом лилий;
- а самое главное – попросить маму приготовить ее фирменный торт.
Без торта, букета, костюма и стопки разобранных бумаг, свидание точно не состоится.
Молодой человек живет в синхронном мире. Это значит, что он не может приступить к следующему делу, пока не закончится предыдущее.
Прежде всего, нужно отправить запрос на торт, так как приготовление занимает несколько часов. Он звонит маме, и она тут же начинает замешивать тесто. К вечеру торт несомненно будет готов. Однако молодой человек не успеет сделать остальные дела, и свидание не состоится. Дело в том, что все это время он провел с трубкой у уха, ожидая подтверждения о завершении запроса. Бессердечный синхронный мир не позволил ему поработать и купить букет.
Решить проблему могло бы асинхронное программирование. С его помощью блокирующий процесс маминой готовки можно убрать из потока приготовления к свиданию.
В асинхронном мире человек не зависит от торта. Он просит маму перезвонить, а сам едет за парадным костюмом в химчистку. Когда выложена последняя вишенка, мама запускает событие «Торт готов». Нарядный молодой человек хватает букет и бежит на свидание.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Шаблоны асинхронности
Можно выделить три самые популярные схемы асинхронных запросов. Рассмотрим их реализацию с помощью «обещаний» (JavaScript) и операторов async-await (C#).
Для демонстрации потребуются тестовые функции, которые имитируют возвращение нужных объектов с задержкой.
JavaScript:
function getPromise(returnValue) { return new Promise((resolve) => { setTimeout(() => { resolve(returnValue); }, 300); }); }
C#:
public static async Task GetStringTask(String toReturn) { await Task.Delay(300); return toReturn; } public static async Task GetIntTask(int toReturn) { await Task.Delay(300); return toReturn; }
Последовательное выполнение
Используется для связанных задач, которые нужно запускать друг за другом. Например, первый запрос получает названия фильмов, а второй – информацию о них.
JavaScript:
getPromise(‘value1’) .then((result) => { return getPromise(result + ‘value2’); }).then((result) => { return getPromise(result + ‘value3’); }).then((result) => { console.log(result); // => value1value2value3 });
Каждая функция возвращает новый Promise, выполнение которого также можно отслеживать. В результате получается удобная одноуровневая цепочка обещаний.
C#:
var str = await GetStringTask(«Hello world»); var len = await GetIntTask(str.Length); var res = await GetStringTask(«Len: » + len); Console.Out.WriteLine(res);
Переменная str получит значение только тогда, когда отработает функция GetStringTask. Лишь после этого обработчик кода продолжит выполнение.
Параллельное выполнение
Применяется для решения независимых задач, когда важно, чтобы выполнились все запросы. Например, данные веб-страницы грузятся с трех серверов, а после этого начинается рендеринг.
Концепция в JavaScript:
Promise.all([ promise1, promise2, promise3 ]).then((results) => { … })
Параметр results – это массив, в котором содержатся результаты всех трех выполненных операций.
C#:
var tasks = new Task[3]; tasks[0] = GetIntTask(1); tasks[1] = GetIntTask(2); tasks[2] = GetIntTask(3); Task.WaitAll(tasks); for (int i = 0; i < 3; i++) { Console.Out.WriteLine(«Res » + i + «: » + tasks
.Result); }
Метод WaitAll класса Task собирает результаты трех запросов вместе.
Управление частотными контроллерами
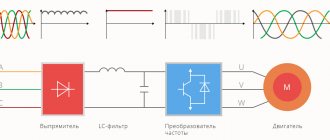
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
- Выпрямитель – тиристорный или транзисторный мост, преобразующий переменный ток в постоянный,
- Инвертор – блок АИМ/ШИМ, работающий по обратному принципу, то есть преобразующий постоянный ток в переменный.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.
Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.
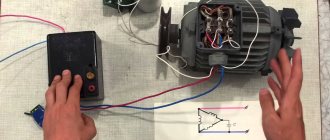
Управление трехфазным двигателем в однофазной сети (PS11036, IRPT2060A, IR2130)
В области силовых приборов “законодателями» являются фирмы INTERNATIONAL RECTIFIER — сокращенно IR и MITSUBISHI Electric — сокращенно ME, а также INFENION Technologies — IT.
Я привожу наименование фирм-изготовителей для того, чтобы пользователи могли ориентироваться при выборе элементов. Так как, в основном, только эти фирмы занимаются разработкой элементной базы для силовых приводов.
Данная статья поможет многим радиолюбителям применить современные силовые электронные приборы для управления 3-х фазными электродвигателями в однофазной сети.
Схема
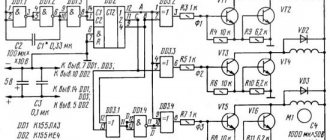
На рис. 1 приведена схема электрическая принципиальная электронного привода электродвигателя. Устройство работает следующим образом.
Рис. 1. Схема управления трехфазными двигателями с помощью силовой электроники в однофазной сети.
Задающий генератор DD1 серии NE555 вырабатывает импульсы частотой 360 Гц, поступающие на вывод 9 DD2 (счетный вход) 55БТМ8 (аналог 74175N — четыре D-триггера). В микросхеме используются три D-тригг*ра в качестве схемы, сдвига.
То есть, с их прямых и инверсных выходов выходит трехфазное напряжение управления частотой 60 Гц, которое подается на соответствующие входы микросхемы DA3 IR2130S.
Чтобы электронный привод работал на различных частотах, нужно резистор R2 номиналом 100 кОм заменить на цепочку из постоянного 62 кОм и переменного 56 кОм резисторов.
Микросхема DA3 IR2130S представляет собой шестиканальный высоковольтный драйвер (схема управления) управления выходными ключами фирмы IR. При нажатии на кнопку S1 “Пуск» драйвер управляет как верхними ключами, так и нижними.
Транзисторы VТ1, VТ2, VТ3 — верхние ключи, соответственно VТ4, VТ5, VТ6 — нижние ключи. Питание схемы осуществляется таким образом.
Трансформатор Т1 понижает напряжение сети до 18 В, которое выпрямляется мостом VDS2 и фильтруется конденсаторами С3, С6. Выпрямленное напряжение поступает на стабилизатор DA2 7815.
С выхода DA2 напряжение +15 В служит для питания микросхемы DA3 IR2130. Напряжение +15 В понижается стабилизатором DA1 7805 (КРЕН5) до 5 В, необходимого для питания микросхем DD1, DD2.
Рис. 2. Схема генератора на микросхеме.
Рис. 3. Установка дополнительного резистора.
Рис. 4. Схема драйвера.
Внимание! Минусовой провод на схеме показан как “общЕго ни в коем случае нельзя соединять с корпусом прибора. Он должен быть надежно изолирован от корпуса. Сам корпус привода и электродвигатель должны быть надежно заземлены.
При работе с устройством надо соблюдать осторожность, чтобы избежать поражения электрическим током!
Детали
Мост VDS1 должен быть рассчитан на прямой ток 20…25 А и обратное напряжение 400 В. Данные параметры зависят от мощности используемого двигателя. Я рассчитывал на мощность 1.5…2 кВт.
Подходящим является мост КВРС2504 — Іпр. = 25 А и LJo6p. = 400 В. Примененный мост можно, конечно, заменить отечественными мощными диодами, установив их на радиатор, но опять же габариты схемы увеличатся.
Мост VDS2 рассчитан на Uo6p. = 400 В и Іпр.=1 А, например, КЦ405. Диоды VD1, VD2, VD3 должны быть быстродействующими, с ІІобр. не менее 400 В, например, 11DF4 или 10DF6.
Резисторы R6, R8, R10, R12, R13, R14 номиналом 100 Ом, R7, R9. R11 — номиналом 47 Ом. Защитные диоды VD4….VD9 — быстродействующие, с ІІобр. не менее 400 В и выдерживающие прямой импульсный ток более 30 А, например, MUR680.
Но можно обойтись и без защитных диодов — для этого нужно применить выходные ключи VТ1 …VТб с защитными диодами, встроенными в корпуса транзисторов.
Особое внимание следует обратить на выходные ключи VТ1 ….VТ6 — это транзисторы технологии IGBT — по входу полевой транзистор, т.е. затвор, а по выходу коллектор и эмиттер — это в первом приближении.
То есть IGBT — это смесь полевой и биполярной технологии. Такие транзисторы производят фирмы Infineon: BUP311D, BUP313D, Harris: HGTH20N40C1D, IR: IRG8C30D, IRGBC2GD с защитными (обратны* ми) диодами.
Рис, 5. Схема силового привода с использованием модуля фирмы MITSUBISHI SEMICONDUCTOR PS11036.
Все резисторы на схеме мощностью 0,25 Вт, кроме R15 — проволочный (падение напряжения на кем должно быть не более 0,5 В). Суммарная емкость конденсаторов после выпрямления сетевого напряжения должна быть около 1000 мкФ при нагрузке 2 кВт и более.
На схеме указаны номиналы С7 и С8 по 330 мкФ для случая нагрузки 1,5 кВт. Конденсаторы C10, С11, С12 номиналом 0,1 мкФ обязательно должны быть с малыми диэлектрическими потерями и термостабильными, рассчитанными на напряжение 50 В.
Трансформатор Т1 — мощностью не более 10 Вт. Если возникли трудности с приобретением DD1 NE555, ее можно заменить мультивибратором, собрав на отечественной 555-й серии.
Схема такого генератора показана на рис. 2. Тактовая частота будет определяться формулой:
F = 1/2C1R1,
где:
Такой генератор будет работать в диапазоне 45 Гц … 25 кГц. Если такой широкий диапазон генерирования не нужен, то вместо переменного резистора R1 номиналом в 510 Ом нужно установить цепочку из резистора номиналом 100 Ом и 470 Ом (рис.
3). Выходные ключи VТ1….VТ6 обязательно надо установить на теплоотвод через электроизоляционные теплопроводные прокладки (подойдет слюда от больших конденсаторов), иначе у конструктора возникнут трудности с теплоотводом и электроизоляцией.
Фирма JR об этом позаботилась и разработала силовые модули в широком ассортименте. В частности для однофазной сети были разработаны модули типов IRPT2060A на мощность нагрузки 2,2 кВт и IRPT2064A на мощность нагрузки 1,5 кВт (рис. 4).
В модуле, кроме силовых ключей, еще установлены силовой мост, токоизмерительные шунты (выводы IS1, IS2 и IS3, IS4) для IRPT2060A номиналом по 25 мОм (для IRPT2064A — номиналом по 45 мОм), терморезистор (выводы RT1 и RT2), имеющий значение 50 кОм ±5% при температуре модуля 25°С и 3,1 кОм при температуре 100°С для обоих модулей. В модуле еще установлен ключ (выводы BR и N). Он такой же мощный, как и шесть ключей, и предназначен для аварийного отключения модуля.
Я не стал с ним экспериментировать. Все ключи изолированы от корпуса модуля так, что отпадает проблема надежной теплоизоляции, хотя и в этом случае она не помешает при длительной работе модуля.
На рис. 5 приведена схема силового привода с использованием модуля фирмы MITSUBISHI SEMICONDUCTOR PS11036 мощностью 2,2 кВт. Эта схема самая простая в управлении.
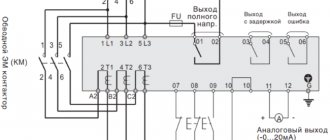
Правда, модули такого типа для однофазной сети я не смог найти. Но ведь можно включит и таким образом, как показано на схеме. Вывод FO — выход сигнала об аварии.