Частотно-регулируемый, или частотно-управляемый привод (ЧРП, ЧУП) — система управления частотой вращения ротора асинхронного двигателя, которая включает в себя электродвигатель и преобразователь частоты.
Так как асинхронные двигатели могут вращаться на одной частоте, задаваемой им питающей сетью переменного тока, для управления ими используют преобразователи частоты.
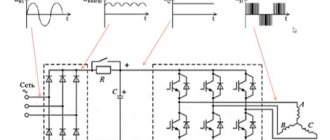
Схема 1. Частотно-регулируемый привод.
Частотный преобразователь (ЧП) — это устройство, объединяющее в себе выпрямитель и инвертор. Выпрямитель преобразует переменный ток промышленной частоты в постоянный, а инвертор наоборот. Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно. За счет такого принципа действия частотно регулируемый привод может плавно регулировать параметры вращения двигателя.
Преимущества применения частотно регулируемых приводов для управления АД
- Облегчает пусковой режим привода.
- Позволяет двигателю долго работать, независимо от степени загрузки.
- Обеспечивает большую точность регулировочных операций.
- Позволяет контролировать состояние отдельных узлов в цепях промышленной электрической сети. За счет этого возможно вести постоянный учет количества времени, наработанного двигателями, чтобы потом оценивать их результативность.
- Наличие электронных узлов дает возможность диагностировать неисправности в работе двигателя дистанционно.
- К устройству можно подключать различные датчики обратной связи (давления, температуры). В результате скорость вращения будет стабильна при постоянно меняющихся нагрузках.
- При пропадании сетевого напряжения включается управляемое торможение и перезапуск.
- В результате:
- повышается уровень КПД за счет чего можно сэкономить порядка 30-35 % электроэнергии;
- количество и качество конечного продукта возрастает;
- снижается износ комплектующих механизмов;
- возрастает срок службы оборудования.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существуют следующие основные способа управления:
1. Скалярное
· Скалярное управление U/f;
· Скалярное управление U/f с энкодером;
2. Векторное
· Векторное управление с разомкнутым контуром;
· Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
СКАЛЯРНОЕ РЕГУЛИРОВАНИЕ
Способ управления U/f
Скалярный метод управления асинхронным электродвигателем переменного тока, заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (U/f) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.
Отношение U/f вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения U/f мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение U/f увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в невозбуждённом состоянии.
Зависимость частоты питания двигателя от времени при скалярном упрравлении
Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение U/f на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода. Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/f довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
U/f — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/f без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/f.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/f составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/f определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/f одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/f предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.
Способ управления U/f с энкодером
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение U/f должно быть постоянным на разных скоростях.
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения.
Таким образом, если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/f.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/f минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/f. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Когда используется скалярное управлени
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для применений, где нет переменной нагрузки и отсутвуют высокие динамические нагрузки (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Недостатки скалярного управления
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
А процесс скалярного регулирования синхронного двигателя с постоянными магнитами может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для управления синхронным двигатлем на низких оборотах с высокими динамическими нагрузками.
Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
· во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
· во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
· также нельзя управлять одновременно моментом и скоростью.
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ
Векторное управление — метод управления бесщеточными электродвигателями переменного тока, который позволяет независимо и практически безынерционно регулировать скорость вращения и момент на валу электродвигателя.
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами, контролируется величина и угол пространственного вектора. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.
Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.
Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания и крутящего момента.
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания и крутящего момента. Для достижения максимальной производительности, преобразователь частоты должен держать данные вектора разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
Преимущества векторного управления:
· высокая точность регулирования скорости;
· плавный старт и плавное вращение двигателя во всем диапазоне частот;
· быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
· увеличенный диапазон управления и точность регулирования;
· снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
К недостаткам векторного управления можно отнести:
· необходимость задания параметров электродвигателя;
· большие колебания скорости при постоянной нагрузке;
· большая вычислительная сложность.
Сравнительная таблица методов управления частотным преобразователем.
| Метод управления | Диапазон управления скоростью | Погрешность скорости3, % | Время нарастания момента, мс | Пусковой момент | Цена | Описание | ||
| Скалярный | 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. | ||
| Векторный | Линейный | Полеориентированное управление | >1:2002 | 0 | <1-2 | Высокий | Высокая | Позволяет плавно и быстро управлять основными параметрами двигателя — моментом и скоростью. Для работы данного метода требуется информация о положении ротора. |
| Прямое управление моментом с ПВМ | >1:2002 | 0 | <1-2 | Высокий | Высокая | Гибридный метод, разработанный для того чтобы объединить преимущества https://engineering-solutions.ru/motorcontrol/vector/#foc и https://engineering-solutions.ru/motorcontrol/vector/#dtc. | ||
| Нелинейный | Прямое управление моментом с таблицей включения | >1:2002 | 0 | <1 | Высокий | Высокая | Имеет высокую динамику и простую схему, но характерной особенностью его работы являются высокие пульсации тока и момента. | |
| Прямое самоуправление | >1:2002 | 0 | <1-2 | Высокий | Высокая | Имеет частоту переключения инвертора ниже чем у других методов и предназначен для уменьшения потерь при управлении электродвигателями большой мощности. | ||
Список используемой литературы:
1. Botan Electric. «Как правильно выбрать метод управления преобразователем частоты? https://elenergi.ru, 2016
2. Cristian Busca. «Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.»: Aalborg universitet, 2010
3. Bial Akin, «Nishant Garg. Scalar (V/f) control of 3-phase induction motors. Application report. SPRABQ8.- Dallas, USA.»: Texas Instruments
4. Статьи https://engineering-solutions.ru
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка
: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия
: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение
: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство
: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность
: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.
Пищевая промышленность
: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ
: различное насосное оборудование, АСУ.
Стройкомплекс
: краны, подъемные механизмы.
Транспорт
: судовой привод, электротранспорт.
Преимущества способа частотного регулирования
- Управление электродвигателем может осуществляться на значительном расстоянии в удобном для этого месте
- Мягкий пуск и уменьшение затрат на техническое обслуживание устройства
- Возможность увеличивать производительность с помощью регулирования скорости, в соответствии с требуемой производственной потребностью
- Повышенный КПД преобразователя частоты до 97% асинхронной машины и до 95% повышает энергоэффективность за счет способа управления применяемого электродвигателя
- Статический преобразователь применяется для переменного момента (невысокий крутящий момент, небольшие скорости) с уменьшенной величиной напряжения на клеммах присоединения к электродвигателю. Также, для использования в случае неизменного момента и мощности, в таком случае высокая эффективность достигается за счет плавного управления скоростью. Благодаря этим возможностям система может считаться универсальной
- Обязательный контроль скорости способствует достижению оптимизации технологического процесса
Как выбрать частотный преобразователь
Следует принять во внимание:
- Мощность и разновидность асинхронного электродвигателя.
- Диапазон и точность регулировки скорости.
- Необходимость точного поддержания момента и скорости вращения на валу двигателя.
- Соответствие конструкции устройства персональным пожеланиям.
СОВЕТ: если какой-то из параметров должен отвечать особым требованиям, то лучше предпочесть не потенциально подходящий частотно регулируемый электропривод, а тот, который будет классом выше.
Виды преобразователей частоты
Существует несколько типов частотников, которые на данный момент являются самыми распространенными для производства и использования:
Электромашинные (электроиндукционные) преобразователи: используются в тех случаях, когда невозможно или нецелесообразно применение электронных ПЧ. Конструктивно такие устройства являются асинхронными двигателями с фазным ротором, которые работают в режиме генератора-преобразователя.
Данные устройства являются преобразователями со скалярным управлением. На выходе из данного аппарата создается напряжение заданной амплитуды и частоты для поддержания определенного магнитного потока в обмотках статора. Они применяются в тех случаях, когда не требуется поддерживать скорость вращения ротора в зависимости от нагрузки (насосы, вентиляторы и прочее оборудование).
Электронные преобразователи: широко применяется в любых условиях работы для различного оборудования. Такие устройства являются векторными, они автоматически вычисляют взаимодействие магнитных полей статора и ротора и обеспечивают постоянное значение частоты вращения ротора вне зависимости от нагрузки.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте. Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
Построение силовой части
Наибольшее распространение получили преобразователи частоты с промежуточным звеном постоянного тока, построенные по схеме выпрямитель — автономный инвертор. Принцип работы и области применения таких преобразователей частоты зависят от типа используемого выпрямителя и автономного инвертора (инвертор напряжения или инвертор тока).
Существует несколько различных схем выпрямителей. По принципу действия они могут быть разделены на три группы: управляемые, полууправляемые и неуправляемые. Схемотехнически все выпрямители строятся по трехфазной мостовой схеме.
Наибольшее распространение получили неуправляемые выпрямители. Выполняемые на самых простых и дешевых полупроводниковых приборах — диодах, они характеризуются максимальной простотой и надежностью, высоким КПД, а также достаточно высоким качеством выходного (выпрямленного) напряжения и гармонического состава тока, потребляемого из сети. Однако неуправляемость процесса преобразования энергии не позволяет реализовать режимы рекуперации, необходимые во многих случаях.
Управляемые выпрямители, выполняемые обычно на низкочастотных тиристорах, лишены как недостатков, так и большинства достоинств диодных выпрямителей. Они обладают высоким КПД и свойством обратимости по направлению преобразования энергии и обычно используются совместно с автономными инверторами тока для регулирования величины выходного тока преобразователя. Недостатки управляемых выпрямителей заключаются в повышенном уровне пульсаций выпрямленного напряжения, в пониженном значении коэффициента мощности, который уменьшается пропорционально выходному напряжению, и в одностороннем направлении выходного тока. При необходимости обеспечить протекание выпрямленного тока в обоих направлениях используют реверсивные тиристорные преобразователи, состоящие из двух включенных встречно-параллельно тиристорных выпрямителей, один из которых предназначен для протекания тока нагрузки в прямом, а другой в обратном направлении. Это усложняет и удорожает преобразователь.
Полууправляемые выпрямители занимают промежуточное положение между управляемыми и неуправляемыми выпрямителями, позволяя регулировать значение выпрямленного напряжения без возможности рекуперации энергии в сеть. В случае управляемых и полууправляемых выпрямителей появляется возможность отключения силовой схемы преобразователей частоты от сети без использования дополнительного оборудования.
В зависимости от типа автономного инвертора контур постоянного тока может быть выполнен как звено, обеспечивающее постоянное напряжение (обычно C- или LC-фильтр), или как звено, поддерживающее постоянство тока (фильтр в виде реактора со значительной индуктивностью). Величина емкости конденсатора в звене постоянного тока обычно составляет 2000–20000 мкФ; такие конденсаторы имеют большие габариты и высокую стоимость.
Характерными особенностями автономных инверторов тока (АИТ, рис. 1а) являются питание от источника тока (в цепь источника включен дроссель значительной индуктивности), обмен реактивной энергией нагрузки с коммутирующим конденсатором, значительное колебание напряжения на входе инвертора при постоянном токе источника, а также зависимость формы кривой напряжения на выходе и входе инвертора от характера нагрузки. АИТ технически реализуются проще, чем АИН, так как в них отсутствует возвратный диодный мост. В преобразователях частоты на основе АИТ при использовании управляемых выпрямителей возможна рекуперация энергии в сеть, что важно для электроприводов, работающих в повторно-кратковременных режимах работы.
Рис. 1. а)
Характерным недостатком АИТ является то, что он не может работать на холостом ходу (с отключенным двигателем). Кроме того, при использовании АИТ возможны существенные потери мощности и формирование дополнительных возмущающих моментов в двигателе, приводящих к колебаниям скорости. При необходимости формирования токов двигателя, близких к синусоидальным, требуется значительное усложнение схемы АИТ.
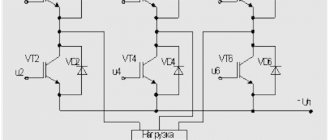
Особенностями автономных инверторов напряжения (АИН, рис. 1б) являются питание от источника напряжения, замыкание контура реактивного тока нагрузки через обратные диоды и независимость формы кривой напряжения на выходе инвертора от характера нагрузки. Недостатком АИН является необходимость использования реверсивных выпрямителей для организации рекуперативных режимов работы электропривода. Однако применение инверторов напряжения позволяет без усложнения схемы получить высокие энергетические показатели и обеспечить выходные токи, близкие к синусоидальным. Именно это обуславливает широкое применение АИН в современном электроприводе.
Рис. 1. б)
Для построения силовых ключей в области коммутируемых токов до 50 А используются биполярные транзисторы с изолированным затвором (IGBT) и полевые транзисторы с изолированным затвором (MOSFET), а также низкочастотные и высокочастотные диоды и тиристоры. Силовые биполярные транзисторы в диапазоне до 50 А находят основное применение в дешевом промышленном оборудовании. В области коммутируемых токов более 50 А основными используемыми приборами являются силовые модули на базе биполярных транзисторов, запираемые тиристоры (GTO, GCT, IGCT). Особо следует выделить транзисторные и диодно-транзисторные модули, выполненные по интегральной технологии на основе транзисторов типа IGBT. Низкие потери мощности в ключевых режимах, большие значения рабочих напряжений и токов, малые времена включений и отключений этих модулей, а также возможность их использования при параллельной работе позволяют создавать мощные и компактные преобразовательные установки с высокой частотой коммутации полупроводниковых ключей.
Рис. 2.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться на любой режим в настройках.
- Практически все устройства обладают диагностическими функциями, что позволяет быстро устранить возникшую неполадку. Однако рекомендуется в первую очередь проверить настройки, исключить вероятность непроизвольных действий работников.
- Регулируемыйприводможетсинхронизировать конвейерные процессы, либо задавать определённое соотношение взаимозависимых величин. Сокращение оборудования ведёт к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически заносятся в память преобразователя частоты. Благодаря чему повышается точность вычисления момента, и улучшается компенсация скольжения.
Область применения
Производителями предлагается широкий ассортимент приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузки, в том числе насосов и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль давления воды у конечного потребителя не вызывает проблем. Интерфейс с продуманной структурой сценариев отлично подходит для управления насосным оборудованием. Благодаря компактной конструкции, привод может быть установлен в шкаф различного исполнения. Продукты нового поколения обладают свойствами передовой техники:
- высокая скорость и точность управления в векторном режиме;
- существенная экономия электроэнергии;
- быстрые динамические характеристики;
- большой низкочастотный вращающий момент;
- двойное торможение и т. д.
Назначение и технические показатели
Комплектные ЧРП напряжением до и выше 1 кВ (предназначенные для приема и преобразования энергии, защиты электрооборудования от токов КЗ, перегрузки) позволяют:
- плавно запускать двигатель, а, следовательно, уменьшать его износ;
- останавливать, поддерживать частоту вращения вала двигателя.
Комплектные ЧРП шкафного исполнения до 1кВ выполняют те же задачи по отношению к двигателям с мощностью 0,55 – 800 кВт. Привод нормально работает, когда напряжение в электросети находится в пределах от -15% до +10%. При безостановочной работе снижение мощности наступает, если напряжение составляет 85%-65%. Общий коэффициент мощности cosj = 0,99. Выходное напряжение автоматически регулируется посредством автоматического включение резерва (АВР).