Всем доброго времени суток. В предыдущих статьях я рассказывал о применении операционных усилителей в линейных схемах, где ОУ охвачен отрицательной обратной связью, которая позволяет строить усилители, параметры которых будут в основном определяться элементами обвязки ОУ. Данная статья расскажет о применении ОУ без обратной связи или даже с положительной обратной связью (ПОС).
Для сборки радиоэлектронного устройства можно преобрески DIY KIT набор по ссылке.
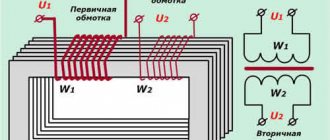
Схема инвертирующего усилителя с двухполярным питанием
Базовая схема инвертирующего усилителя с двухполярным питанием выглядит вот так:
Здесь мы видим два резистора и сам . На вход подаем сигнал, а с выхода уже снимаем усиленный сигнал. Как можно заметить, НЕинвертирующий вход ОУ заземлен. Как же работает схема? Здесь мы видим обратную связь. То есть с выхода сигнал подается обратно на вход через резистор R2. Наш усилитель является инвертирующим, так как сигнал на выходе на 180 градусов сдвинут по фазе относительно входного сигнала. Значит, в узле, где соединяются два резистора и инвертирующий вход, выходной сигнал будет приходить со знаком «минус». Такая обратная связь называется отрицательной обратной связью (ООС). Она уменьшает высокий коэффициент усиления ОУ до нужных нам значений.
В НЕинвертирующем усилителе обратная связь идет по напряжению, а в инвертирующем усилителе — по току.
Если вы читали статью про ОУ, то, наверное, помните, что если один из входов ОУ соединен с землей, то и другой вход имеем точно такой же потенциал. В данном случае НЕинвентирующий вход у нас соединен с землей, следовательно, на инвертирующем входе будет точно такой же потенциал, то есть 0 Вольт. Такой вход еще называют мнимой (виртуальной) землей. Как говорит на Википедия, «мнимый — это фальшивый, поддельный, ложный».
Коэффициент усиления по напряжению любого усилителя выражается формулой
Итак, что получаем в итоге?
Входное напряжение из формулы выше
Но так как наш усилитель инвертирует входной сигнал, следовательно, на выходе у нас будет напряжение со знаком «минус», то есть -Uвых.
В этом случае ток I2 будет выражаться формулой:
Отсюда находим коэффициент усиления
Так как входное сопротивление инвертирующего входа бесконечно велико, следовательно, ток будет протекать только через цепь R1—>R2. Два разных тока в одной ветви быть не может, поэтому получается, что
В итоге наша формула сокращается и получаем
Компаратор напряжения — выход с открытым коллектором
Как правило, выход компаратора напряжения представляет собой выход с открытым коллектором.
Выход открытый коллектор имеет отрицательную полярность. Это означает, что на этом выходе не бывает положительного сигнала и нагрузка должна подключаться между этим выходом и источника питания.
В некоторых схемах к выходу компаратора подключают нагрузочный (подтягивающий) резистор для того, чтобы обеспечить сигнал высокого уровня поступающего на вход следующего элемента схемы.
Операционные усилители (ОУ), такие как LM324, LM358 и LM741 обычно не используются в радиоэлектронных схемах в качестве компаратора напряжения из-за их биполярных выходов. Тем не менее, эти операционные усилители могут быть использованы в качестве компараторов напряжения, если к выходу ОУ подключить диод или транзистор для того чтобы создать выход с открытым коллектором.
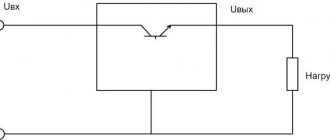
Ниже представлена логика работы компаратора имеющий выход с открытым коллектором:
Ток будет течь через открытый коллектор, когда напряжение на входе (+) будет ниже, чем напряжение на входе (-). И соответственно ток не будет протекать через открытый коллектор, когда напряжение на входе (+) будет выше, чем напряжение на входе (-).
Пример работы инвертирующего усилителя
Давайте посмотрим, как работает наш усилитель в программе-симуляторе электронных схем Proteus. Здесь мы собираем базовую схему с двухполярным питанием
В Proteus она будет выглядеть вот так:
Здесь мы взяли значение резисторов R2=10 кОм и R1=1 кОм, следовательно, коэффициент усиления такой схемы будет равен -10. Знак «минус» в данном случае просто инвертирует усиленный сигнал, что мы и видим на осциллограмме ниже. Входной сигнал — это розовая осциллограмма, а выходной — это желтая осциллограмма. Выходной сигнал находится в противофазе относительно входного, то есть инвертирует его. Отсюда и название «инвертирующий усилитель».
Трехфазные драйверы
Для управления электродвигателями часто применяются трехфазные системы электропривода. Естественно, такую систему управления силовыми транзисторами можно реализовать с помощью трех полумостовых драйверов. Но, при всей своей очевидности, данное решение получается довольно габаритным, различие значений некоторых параметров драйверов разных фаз может приводить к «перекосам» системы, снижению эффективности управления и понижению общего КПД системы.
Поэтому компания IR предлагает готовые решения данной задачи, реализованные в виде трехфазных драйверов. Наиболее интересным примером такого драйвера является микросхема IRS26302D, представленная на рисунке 4. Драйвер имеет семь выходных каналов, управляемых независимыми входами. Шесть каналов используются для построения самого трехфазного моста, а седьмой канал может применяться для реализации корректора коэффициента мощности (ККМ) или системы защиты и рекуперации.
Рис. 4. Типовая схема включения семиканального трехфазного драйвера
Если с функционалом ККМ вопросов у читателя, вероятно, не возникнет, то описание работы системы защиты может быть полезным. Итак, при управлении мощным мотором с высокой механической инерционностью, при снятии управляющих воздействий с драйвера (для остановки мотора) мотор может продолжить свое вращение по инерции, выполняя тем самым роль генератора электроэнергии — потенциал силовой шины системы начнет повышаться. Если мотор достаточно мощный, то напряжение может вырасти настолько, что превысит все допустимые уровни рабочих напряжений как драйвера, так и транзисторов моста, что приведет к их пробою и выходу из строя. Для предотвращения такой ситуации может использоваться дополнительный седьмой канал драйвера. Микросхема постоянно отслеживает значение тока на силовой шине с помощью токоизмерительного резистора, и в момент, когда будет детектирован большой обратный ток в шине (ситуация генерации электроэнергии мотором), транзистор, управляемый седьмым каналом, откроется и начнет «сливать» избыточную мощность на защитном диоде (или резисторной сборке). Если же вместо пассивного сжигания энергии в резисторном модуле в виде тепла использовать рекуператор, включенный в цепь вместо этих резисторов, то можно запасать избыточную энергию в аккумуляторных батареях для ее последующего использования (например, при работе двигателя на повышенной нагрузке).
Естественно, одной этой микросхемой семейство трехфазных драйверов, производимых компанией IR, не исчерпывается. Более полный перечень микросхем с указанием их ключевых параметров приводится в таблице 4.
Таблица 4. Трехфазные драйверы и их ключевые параметры
| Наименование | Число каналов | Напря-жение на шине, В | Ток Io+, мA | Ток Io-, мA | Время задержки пере-ключения плечей полумоста ном., нс | Время вклю-чения Ton ном., нс | Время выклю-чения Toff ном., нс | Инверти-рованные входы | Корпус |
| IR3230S | 6 | 65 | 350 | 350 | — | 250 | 250 | LIN/HIN | 28 Lead SOIC |
| IRS2334M | 6 | 600 | 120 | 250 | 290 | 530 | 530 | LIN/HIN | 28-Lead MLPQ |
| IRS2334S | 6 | 600 | 120 | 250 | 290 | 530 | 530 | LIN/HIN | 20-Lead SOIC |
| IRS23365D | 6 | 600 | 180 | 380 | 275 | 530 | 530 | LIN/HIN | 48 Lead MLPQ |
| IR21363 | 6 | 600 | 200 | 350 | 290 | 425 | 400 | LIN/HIN | 28 or 44 Lead |
| IR21364 | 6 | 600 | 200 | 350 | 290 | 500 | 530 | LIN/HIN | 28 or 44 Lead |
| IR21365 | 6 | 600 | 200 | 350 | 290 | 425 | 400 | LIN/HIN | 28 or 44 Lead |
| IR21368 | 6 | 600 | 200 | 350 | 290 | 425 | 400 | LIN/HIN | 28 or 44 Lead |
| IRS2336 | 6 | 600 | 200 | 350 | 275 | 530 | 530 | LIN/HIN | 28 or 44 Lead |
| IRS23364D | 6 | 600 | 200 | 350 | 270 | 530 | 530 | — | 28 or 44 Lead |
| IRS2336D | 6 | 600 | 200 | 350 | 270 | 530 | 530 | LIN/HIN | 28 or 44 Lead |
| IRS26310DJ | 6 | 600 | 200 | 350 | 290 | 530 | 530 | — | 44 Lead PLCC |
| IR2130 | 6 | 600 | 250 | 500 | 2500 | 675 | 425 | LIN/HIN | 28 or 44 Lead |
| IR2131 | 6 | 600 | 250 | 500 | 700 | 1300 | 600 | — | 28 or 44 Lead |
| IR2132 | 6 | 600 | 250 | 500 | 800 | 675 | 425 | LIN/HIN | 28 or 44 Lead |
| IR2133 | 6 | 600 | 250 | 500 | 250 | 750 | 700 | LIN/HIN | 28 or 44 Lead |
| IR2135 | 6 | 600 | 250 | 500 | 250 | 750 | 700 | LIN/HIN | 28 or 44 Lead |
| IR2136 | 6 | 600 | 250 | 500 | 290 | 425 | 400 | LIN/HIN | 28 or 44 Lead |
| IRS2330 | 6 | 600 | 250 | 500 | 2000 | 500 | 500 | LIN/HIN | 28 or 44 Lead |
| IRS2330D | 6 | 600 | 250 | 500 | 2000 | 500 | 500 | LIN/HIN | 28 or 44 Lead |
| IRS2332 | 6 | 600 | 250 | 500 | 700 | 500 | 500 | LIN/HIN | 28 or 44 Lead |
| IRS2332D | 6 | 600 | 250 | 500 | 700 | 500 | 500 | LIN/HIN | 28 or 44 Lead |
| IR2233 | 6 | 1200 | 250 | 500 | 250 | 750 | 700 | LIN/HIN | 28 or 44 Lead |
| IR2235 | 6 | 1200 | 250 | 500 | 250 | 750 | 700 | LIN/HIN | 28 or 44 Lead |
| IR2238Q | 6 | 1200 | 350 | 540 | 1000 | 550 | 550 | HIN | 64 Lead MQFP |
| IRS26302DJ | 7 | 600 | 200 | 350 | 290 | 530 | 530 | LIN/HIN | 44 Lead PLCC |
Насыщение выхода инвертирующего усилителя
Давайте представим себе такую ситуацию. У нас входное переменное напряжение амплитудой 1 В. Коэффициент усиления 50. По нашим расчетам на выходе мы должны получить сигнал амплитудой 50 В. Но как мы получим 50 В, если питание нашего усилителя, допустим, +-15 В? Усиленный сигнал, амплитудой больше чем 15 В, мы получить не сможем. Хотя типичное падение напряжения во внутренних цепях реальных ОУ составляет около 0,5-1,5 В. То есть максимальный размах сигнала, который мы можем получить в данном случае на выходе будет 27-29 Вольт.
Хотя в настоящее время есть ОУ, которые все-так позволяют получать на выходе +-Uпит. Такое свойство некоторых ОУ называется Rail-to-Rail. В дословном переводе «от рельса до рельса» или «от шины до шины». Есть такие параметры, как Rail-to-Rail по входу (Rail-to-Rail input). Здесь на вход мы можем подавать сигналы вплоть до Uпит ОУ. Иногда в даташите оговаривается, с отрицательной или положительной шины питания можно подходить к этому параметру. Есть также есть Rail-to-Rail output. Здесь на выходе мы можем получить напряжение +-Uпит. Если усиленный сигнал на выходе не вписывается в такой диапазон, то он будет срезаться. Такое свойство ОУ называется насыщением выхода. То есть надо всегда помнить, что если амплитуда сигнала будет превышать +-Uпит усилителя, то такой сигнал на выходе будет срезан по этому уровню.
Продемонстрируем это в симуляторе Proteus. Итак, давайте на вход подадим синусоидальный сигнал амплитудой в 1 В, а коэффициент усиления сделаем 20, подобрав нужные резисторы. То есть по нашим расчетам мы должны получить синус с амплитудой в 20 Вольт. Смотрим осциллограмму
Подавали на вход синусоиду, а получили на выходе синусоиду с обрезанными верхушками и амплитудой в 14 В. Одна клеточка в данном случае — это 2 В. Как вы видите,сигнал, амплитудой более чем +-Uпит мы получить не сможем. Всегда помните об этом, особенно при конструировании радиоэлектронных устройств.
Драйверы полумостов
Большинство микросхем из номенклатуры драйверов компании International Rectifier содержат в одном корпусе два выходных канала для управления верхним и нижним ключом. Эти драйверы управляют входными каналами независимо, что может быть использовано для одновременного открытия обоих ключей, или зависимо — это подразумевает невозможность одновременного открытия ключей (даже на короткий период за счет встраиваемой паузы между переключением ключей — так называемый Dead-Time (DT)), что обеспечивает принципиальное отсутствие сквозного тока через ключи. Во втором случае драйверы носят название полумостового драйвера (Half-Bridge driver).
Механизм встроенного временного промежутка Dead-Time обеспечивает гарантированное закрытие одного силового ключа до момента начала открытия ключа в противоположном плече. Гарантией надежного закрытия противоположного транзистора является встроенная схема, контролирующая состояние ключей, и наличие схемы задержки, формирующей промежуток времени, в течение которого закрыты оба транзистора в плечах полумоста.
Большинство драйверов обоих типов имеет структуру, представленную на рисунке 2 на примере структурной схемы драйвера IRS2110.
Рис. 2. Внутренняя структурная схема драйвера IRS2110
Как видно из рисунка 2, сигналы управления верхним и нижним ключами поступают через соответствующие входы Hin и Lin на триггеры Шмитта, затем через элемент «3ИЛИ-НЕ» — на преобразователи уровня и формирователи ШИМ. Благодаря наличию элементов логического «ИЛИ» существует возможность заблокировать работу драйвера с помощью входного сигнала (Shut-Down), а имеющиеся на входе элементов RS-триггеры исключают неопределенное состояние входов после подачи напряжения питания на устройство.
Входные сигналы совместимы по уровням с сигналами микросхем, выполненных по стандартам технологии ТТЛ/КМОП. Некоторые драйверы интерпретируют как логическую единицу входной сигнал, уровень которого составляет не менее 10% от напряжения питания драйвера (например, IRS211x). Другие драйверы (например, серий IRS210x, IRS212x и IRS213x) имеют фиксированный диапазон напряжений, соответствующий переходному состоянию между логическими уровнями. Для указанных типов драйверов он соответствует интервалу 1,5…2 В.
Микросхемы обеспечивают одинаковую временную задержку прохождения сигнала для обоих каналов и имеют дополнительный функционал — возможность перехода в неактивное состояние (при наличии входа SD), разделение силовой и сигнальной «земель», ограничение максимального рабочего тока транзисторов и т.п. Типовые схемы включения драйверов представлены на рисунке 3.
Рис. 3. Типовые схемы включения полумостовых драйверов: без Dead-Time (а) и с Dead-Time (б)
Номенклатура полумостовых драйверов в портфеле IR очень широка. В следующих сводных таблицах 2 и 3 приводится информация о микросхемах, представляющих наибольший интерес для пользователя.
Таблица 2. Полумостовые драйверы без встроенной функции Dead-Time
| Наименование | Напря-жение на шине, В | Ток Io+, мA | Ток Io-, мA | Время вклю-чения Ton ном., нс | Время выклю-чения Toff ном., нс | Инверти-рованные входы | Разделены сигнальная и силовая «земли» | Вход отклю-чения (SD) | Корпус |
| IRS2001M | 200 | 130 | 270 | 160 | 150 | — | PQFN 4 x 4 | ||
| IRS2001 | 200 | 290 | 600 | 160 | 150 | — | 8-Lead SOIC | ||
| IRS2011 | 200 | 1000 | 1000 | 60 | 60 | — | 8-Lead SOIC | ||
| IRS2110 | 500 | 2500 | 2500 | 130 | 120 | — | Да | Да | 16-Lead SOIC |
| IR25604 | 600 | 200 | 350 | 220 | 200 | LIN / HIN | 8-Lead SOIC | ||
| IRS2301 | 600 | 200 | 350 | 220 | 200 | — | 8-Lead SOIC | ||
| IRS2302 | 600 | 200 | 350 | 220 | 200 | — | 8-Lead SOIC | ||
| IRS26072D | 600 | 200 | 350 | 200 | 200 | — | 8-Lead SOIC | ||
| IRS2607D | 600 | 200 | 350 | 515 | 500 | — | 8-Lead SOIC | ||
| IRS2101 | 600 | 290 | 600 | 160 | 150 | — | 8-Lead SOIC | ||
| IRS2106 | 600 | 290 | 600 | 220 | 200 | — | 8-Lead SOIC | ||
| IRS21064 | 600 | 290 | 600 | 220 | 200 | — | 14-Lead SOIC | ||
| IRS2112 | 600 | 290 | 600 | 135 | 130 | — | Да | Да | 16-Lead SOIC |
| IRS21856 | 600 | 500 | 500 | 150 | 160 | LIN/HIN | 14-Lead SOIC | ||
| IRS2181 | 600 | 1900 | 2300 | 180 | 220 | — | 8-Lead SOIC | ||
| IRS21814 | 600 | 1900 | 2300 | 180 | 220 | — | Да | Да | 14-Lead SOIC |
| IRS21814M | 600 | 1900 | 2300 | 180 | 220 | — | Да | Да | PQFN 4 x 4 |
| IR25607 | 600 | 2500 | 2500 | 120 | 94 | LIN/HIN | 16-Lead SOIC | ||
| IRS2113 | 600 | 2500 | 2500 | 130 | 120 | — | Да | Да | 16-Lead SOIC |
| IRS2113M | 600 | 2500 | 2500 | 130 | 120 | — | Да | Да | PQFN 4 x 4 |
| IRS2186 | 600 | 4000 | 4000 | 170 | 170 | — | 8-Lead SOIC | ||
| IRS21864 | 600 | 4000 | 4000 | 170 | 170 | — | Да | Да | 14-Lead SOIC |
| IRS21867 | 600 | 4000 | 4000 | 170 | 170 | — | 8-Lead SOIC | ||
| IR2213 | 1200 | 2000 | 2500 | 280 | 225 | — | Да | Да | 16-Lead SOIC |
Таблица 3. Полноценные полумостовые драйверы (с Dead-Time)
| Наименование | Напря-жение на шине, В | Ток Io+, мA | Ток Io-, мA | Время задержки переклю-чения плечей полумоста ном., нс | Время вклю-чения Ton ном., нс | Время выклю-чения Toff ном., нс | Инверти-рованные входы | Разделены сигнальная и силовая «земли» | Корпус |
| IRS2003 | 200 | 290 | 600 | 520 | 680 | 150 | LIN | 8-Lead SOIC | |
| IRS2004 | 200 | 290 | 600 | 520 | 680 | 150 | — | 8-Lead SOIC | |
| IR25601 | 600 | 120 | 260 | 100 | 220 | 220 | LIN/HIN | 8-Lead SOIC | |
| IR25606 | 600 | 200 | 350 | 540 | 220 | 200 | LIN/HIN | 8-Lead SOIC | |
| IRS2509S | 600 | 200 | 350 | 530 | 750 | 250 | IN | 8-Lead SOIC | |
| IRS2608D | 600 | 200 | 350 | 530 | 250 | 250 | LIN | 8-Lead SOIC | |
| IR25602 | 600 | 210 | 360 | 520 | 680 | 150 | LIN | 8-Lead SOIC | |
| IRS2103 | 600 | 290 | 600 | 520 | 680 | 150 | LIN | 8-Lead SOIC | |
| IRS2104 | 600 | 290 | 600 | 520 | 680 | 150 | — | 8-Lead SOIC | |
| IRS2108 | 600 | 290 | 600 | 540 | 220 | 200 | HIN | 8-Lead SOIC | |
| IRS21084 | 600 | 290 | 600 | 540…5000 | 220 | 200 | HIN | Да | 14-Lead SOIC |
| IRS2109 | 600 | 290 | 600 | 540 | 750 | 200 | — | 8-Lead SOIC | |
| IRS21091 | 600 | 290 | 600 | 540…5000 | 750 | 200 | — | 8-Lead SOIC | |
| IRS21094 | 600 | 290 | 600 | 540…5000 | 750 | 200 | — | Да | 14-Lead SOIC |
| IRS2111 | 600 | 290 | 600 | 650 | 750 | 150 | — | 8-Lead SOIC | |
| IRS2304 | 600 | 290 | 600 | 100 | 150 | 150 | — | 8-Lead SOIC | |
| IRS2308 | 600 | 290 | 600 | 540 | 220 | 200 | — | 8-Lead SOIC | |
| IRS2183 | 600 | 1900 | 2300 | 400 | 180 | 220 | LIN | 8-Lead SOIC | |
| IRS21834 | 600 | 1900 | 2300 | 400…5000 | 180 | 220 | LIN | Да | 14-Lead SOIC |
| IRS2184 | 600 | 1900 | 2300 | 400 | 680 | 270 | — | 8-Lead SOIC | |
| IRS21844 | 600 | 1900 | 2300 | 400…5000 | 680 | 270 | — | Да | 14-Lead SOIC |
| IRS21844M | 600 | 1900 | 2300 | 400…5000 | 680 | 270 | — | Да | PQFN 4 x 4 |
| IR2114 | 600 | 2000 | 3000 | 330 | 440 | 440 | — | Да | 24 Lead SSOP |
| IR21141 | 600 | 2000 | 3000 | 330 | 440 | 440 | — | Да | 24 Lead SSOP |
| IR2214 | 1200 | 2000 | 3000 | 330 | 440 | 440 | — | Да | 24 Lead SSOP |
| IR22141 | 1200 | 2000 | 3000 | 330 | 440 | 440 | — | Да | 24 Lead SSOP |
Ток смещения и смещение выхода
Входы реального ОУ потребляют небольшой ток, который называется током смещения. В англоязычных даташитах он называется Input Bias Current. Если входные цепи ОУ построены на биполярных транзисторах, то такой ток смещения будет где-то несколько десятков наноампер, в отличите от ОУ, где входные цепи построены на полевых транзисторах. Во входных цепях, построенных на полевых транзисторах, ток смещения оценивается десятыми долями пикоампер. Следовательно, ток смещения очень важен именно для ОУ, чьи входные цепи построены на биполярных транзисторах.
Почему же так важен ток смещения? Давайте еще раз рассмотрим схему
Даже если мы не подаем никакого сигнала на вход, то на выходе у нас все равно будет какое-то маленькое постоянное напряжение. Почему так происходит? Во всем как раз и виноват ток смещения. Он создает падение напряжения на резисторе обратной связи. В данном случае — это резистор R2. А как вы знаете, на большем сопротивлении падает большее напряжение. То есть если номинал сопротивления R2 будет очень большим, то на нем будет падать большое напряжение, которое как раз и пойдет на выход нашего ОУ.
Допустим, ток смещения равен 0,1 мкА, а резистор R2= 1 МОм, то какое падение напряжения будет в этом случае на резисторе? Вспоминаем закон Ома: I=U/R, отсюда U=IR= 0,1 В. То есть на выходе у нас уже будет постоянное напряжение 0,1 В! Подавая на вход такого усилителя полезный сигнал с током смещения в 0,1 мкА , на выходе этот сигнал будет усиливаться и суммироваться с постоянной составляющей в 0,1 В. В нашем случае происходит смещение нулевого уровня. Наглядно — на рисунке ниже.
Входное напряжение смещения компаратора
Компараторы не являются совершенными устройствами, и их работа может иметь недостаток от последствий такого параметра, как входное напряжение смещения. Входное напряжение смещения для многих компараторов может составлять всего несколько милливольт и в большинстве схем может быть проигнорировано.
В основном проблема, связанная с входным напряжением смещения возникает, когда входное напряжение изменяется очень медленно. Конечным результатом входного напряжения смещения является то, что выходной транзистор не полностью открывается или закрывается, когда входное напряжение находится недалеко от опорного напряжения.
Следующая диаграмма иллюстрирует эффект смещения входного напряжения возникающий в результате медленного изменения входного напряжения. Этот эффект возрастает при увеличении выходного тока транзистора. Поэтому, для уменьшения этого эффекта, необходимо обеспечить максимальное сопротивление резистора R4.
Последствия входного напряжения смещения можно уменьшить, добавив в схему гистерезис. Это приведет к тому, что опорное напряжение будет меняться, когда выход компаратора переходит на высокий или низкий уровень.
Способы борьбы с током смещения
В некоторых случаях током смещения можно пренебречь, если он не оказывает сильного влияния на ваши требования по сигналу. Но если все-таки вы разрабатываете какое-либо точное устройство, где выходной сигнал должен строго вписываться в рамки ТЗ, то в этом случае можно прибегнуть к таким способам:
1) Ставить в цепь обратной связи резистор малого номинала.
На малом сопротивлении падает малое напряжение. Следовательно, на выходе уже будет меньшее постоянное напряжение. Стандартный диапазон резисторов от нескольких килоом и до 50 кОм.
2) Ввести в схему компенсирующий резистор
В этом случае он будет определяться по формуле:
Если все-таки выходной сигнал соответствует вашим ожиданиям и без RК , то лучше его не ставить, так как любой резистор вносит шумовые искажения в сигнал. Зачем лишний раз добавлять в схему шум?
3) Использовать ОУ с входными цепями, построенными на полевых транзисторах, либо подбирать ОУ с малыми токами смещения, благо сейчас технологии производства таких ОУ далеко шагнули вперед.
Программирование и компаратор
Компоратор используется не только как часть электрической схемы ШИМ и т. д., его часто используют для создания отдельных программ или их компонентов. Например, устройство часто используется для создания java-коллекций.
- Чтобы работать, Вам понадобится специальная программа Maven. Для начала Вам нужно создать проект, для полноценной работы необходимо подключение к интернету. Создаете новый проект, в структуре выберете два компонента: comparator и pojo. Наличие проверяется при помощи утилиты JUnit 4.11;
- Установите pom.xml и создайте новый файл. Прерывание процесса недопустимо, поэтому очень важно на каждом этапе сохранять. После осуществляется создание и настройка POJO, где указываются нужные настройки. Параметры зависят от требований к конкретной библиотеке. Это могут быть даты рождения, общая информация по проживанию и т. д.;
- И только после создается компаратор. Это класс, который используется для поверки данных и их распределения по нужным папкам. Использование данного класса необходимо, если нужно отсортировать определенную информацию по заданным параметрам (цвета, размеры, даты). Благодаря этому обеспечивается защита данных и их классификация по определенному принципу.
Купить готовый компаратор можно в любом магазине радиотехнических приборов и электротехники. Цена прибора варьируется в зависимости от его назначения и количества каналов.
Инвертирующий усилитель с однополярным питанием
В некоторых случаях нам даже иногда нужно переместить нулевой уровень на более высокий «пьедестал», чтобы мы могли полностью усиливать сигнал, если дело касается однополярного питания. Работать с однополярным питанием всегда проще и удобнее, чем с двухполярным. Поэтому, в этом случае надо поднять нулевой уровень на некоторый пьедестал, чтобы полностью усиливать переменный сигнал. То есть добавить постоянную составляющую в сигнал. В этом случае схема примет чуть-чуть другой вид:
Как можно увидеть, сейчас мы питаем наш ОУ однополярным питанием. Что будет, если мы НЕинвертирующий выход посадим на землю?
То есть мы получили базовую схему инвертирующего усилителя, но только с однополярным питанием. Давайте ппросимулируем такую схему. Коэффициент усиления в данном случае будет равен-10, так как мы взяли соотношение резисторов 10 килоом и 1 килоом. Загоняю на вход сигнал амплитудой в 1 В.
Что имеем в итоге на виртуальном осциллографе?
Как вы видите, в этом случае усиленная полуволна сигнала вырезается полностью. Оно и понятно, так как напряжение питания у нас однополярное и проломить «пол» нулевого потенциала невозможно. Но можно сделать одну хитрость: поднять «уровень пола» и дать сигналу место для размаха.
В этом случае нам надо добавить Uсм , для того, чтобы поднять сигнал над уровнем «пола». Но не все так просто, дорогие друзья!
Здесь уже будет использоваться более хитрая формула, а не просто вольтдобавка. Приблизительная формула выглядит вот так:
Итак, мы хотим усилить наш сигнал полностью без среза. Какое же должно быть значение Uвых ? Оно должно иметь значение половины Uпит , чтобы сигнал ходил туда-сюда без срезов. Но также надо учитывать и коэффициент усиления, иначе получится насыщение выхода, о чем мы писали выше.
В нашем случае мы хотим увеличить сигнал амплитудой в 1 В в 10 раз. То есть Uпит должно быть как минимум 20 Вольт. Так как ОУ поддерживают однополярное питание до 32 В, то давайте для красоты выставим Uпит = 30 В. Рассчитываем Uсм :
Проверяем симуляцию, все ок!
Как здесь можно увидеть, желтый выходной сигнал поднялся над нулевым уровнем и усилился без искажений. В данном случае желтый сигнал — это сумма постоянного напряжения и переменного синусоидального сигнала.
То есть получилось что-то типа вот этого:
Хорошо это или плохо, когда в переменном сигнале есть постоянная составляющая, то есть постоянное напряжение? В некоторых случаях это плохо, потому как такой сигнал трудно использовать, и поэтому чаще всего его прогоняют через конденсатор, так как он пропускает через себя только переменный ток и блокирует прохождение постоянного тока. А еще лучше поставить фильтр из дифференцирующей цепи, с помощью которого можно отсекать лишние частоты.
Назначение
Зачем нужен компаратор и как его использовать без усилителя? В большинстве случаев, этот прибор применяется в несложных компьютерных схемах, где нужно сравнивать сигналы входящего напряжения. Это может быть зарядное устройство для ноутбука или телефона, весы (определитель массы), датчик сетевого напряжения AVR, таймер (компоратор типа lm 358, микроконтроллер и т. д. Также его применяют различные интегральные микросхемы для контроля входных импульсов, обеспечивая связь между источником сигнала и его центром назначения.
Фото — компараторы для компьютера
Наиболее популярным примером является компаратор триггер (регулятор) Шиммера. Он работает в режиме многоканальности, соответственно, может сравнивать большое количество сигналов. В частности, данный триггер применяется для того, чтобы восстановить цифровой сигнал, который искажает связь в зависимости от уровня напряжения и расстояния источника питания.
Это аналог стандартного компаратора, просто с более расширенным функционалом, который обеспечивает измерение нескольких входящих сигналов.
Фото — ОУ компаратор
Также есть компаратор шероховатости. Это устройство, которое помогает визуально определить состояние поверхности, которая уже подвергалась обработке. Применение этого приспособления обосновано необходимостью определять допуски обработанных ранее поверхностей.
Драйверы измерения тока
При использовании вышеуказанных интегральных драйверов остается открытым вопрос о контроле тока, потребляемого нагрузкой. Если интегральная микросхема драйвера имеет функцию контроля тока, то, как правило, она просто сообщает о возникновении неисправности, используя дополнительный выход сигнализации об ошибке, никак не расшифровывая причину ее возникновения. Одной из причин аварийной ситуации может быть перегрузка по току выходного каскада.
Для контроля тока, потребляемого нагрузкой, компания International Rectifier выпускает интегральные микросхемы, позволяющие реализовать данную функцию. На рисунке 5 приведены схемы контроля тока, потребляемого нагрузкой, на микросхеме, совмещенной с драйвером (а), и специализированной микросхеме измерения тока (б).
Рис. 5. Примеры включения драйверов, контролирующих ток в нагрузке
Микросхемы IR22771 широко применяются при управлении двигателями и включаются индивидуально в каждую фазу. Микросхема не является драйвером в классическом смысле, т.к. не управляет выходными транзисторами, а только обеспечивает измерение тока и вырабатывает управляющие воздействия для центрального управляющего узла (чаще всего — DSP-контроллера).