Ультразвуковой датчик — это специальный инструмент, используемый для измерений в промышленной автоматизации. С его помощью можно измерять расстояние, высоту и уровень, а также определять положение в пространстве, обнаруживать наличие объектов и даже подсчитывать их по отдельности. Благодаря этому, УЗ-прибор имеет широкое применение в промышленности. Однако есть некоторые условия, которые могут мешать устройству корректно выполнять задачу. Обо всем этом далее.
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ
Технические спецификации и особенности продукта:
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис. 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3
- Введение в микроконтроллеры stm8
- Микроконтроллер STM8S103F3
- Схема центрального микроконтроллера LEGO MINDSTORMS EV3 programmable brick main hardware schematics
Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Описание и назначение
Датчик ультразвука — техническое устройство, которое состоит из нескольких основных частей:
Излучатель
Наиболее распространены два вида излучателей: магнитострикционный и пьезоэлектрический.
Магнитострикционный — ультразвуковые колебания возникают при изменении линейных размеров ферромагнетика в переменном магнитном поле.
Достоинства:
- надежность — не менее 10 000 часов непрерывной работы;
- коэффициент полезного действия 80%.
Недостатки:
- сложная конструкция;
- необходимо водяное охлаждение.
Пьезоэлектрический – ультразвуковые волны возникают при изменении линейных размеров диэлектрика, выполненного в виде мембраны, в переменном электрическом поле.
Достоинства:
- простота конструкции;
- получение ультразвука широкого частотного диапазона;
- незначительные размеры.
Недостатки:
- низкая мощность излучения.
- В ультразвуковых датчиках используются в основном пьезоэлектрические излучатели.
Приемник
Пьезоэлектрический эффект имеет обратную сторону: ультразвук, попадая на пьезоэлемент, вызывают в нем колебательные движения, в результате которых возникает электрический ток. На этом принципе работают датчики ультразвукового излучения: возникновение тока в электрической цепи говорит о появлении объекта перед прибором.
По конструкции приемо-передающей системы выделяют два типа датчиков:
- с одной головкой
В данной схеме передатчик и приемник — единый элемент. Мембрана, излучив ультразвук, принимает отраженный сигнал и формирует электрический сигнал. Это упрощает конструкцию, уменьшает размер. Однако есть недостаток. Мембрана после излучения не может сразу перейти к приему – необходимо время, чтобы колебания погасли. Этот период получил наименование «мертвое время». Расстояние до приемника, ближе которого отраженный объектом сигнал будет попадать на мембрану в мертвое время, называется слепой зоной. На таком расстоянии прибор не фиксирует сигнал, и объект не обнаружиться. С этим явлением борются. При помощи настроек и специальных режимов работы удается уменьшить слепую зону в 2 раза, но полностью устранить ее невозможно.
- с двумя головками
Передатчик и приемник – отдельные части конструкции. У прибора нет слепой зоны, однако требуется настройки элементов для совпадения частоты передачи и приема сигнала.
Назначение датчика ультразвука — фиксация появления объектов в зоне действия, измерение расстояния до них, подсчет перемещающихся в зоне обзора предметов, определения уровня сыпучих грузов и жидкостей. При выполнении этих задач он может работать в темноте, в условиях задымленности, запыленности, повышенной влажности, высоких и низких температур. Прибор нечувствителен к звуковым сигналам слышимого диапазона. При необходимости легко регулируется на другие измерительные диапазоны.
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry
Pi, ESP8266 и ESP32 модулях.
Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач. Датчик имеет небольшие габариты и простой интерфейс.
Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Работа ультразвукового уровнемера
Ультразвуковой датчик уровня устанавливается на верхнюю часть резервуара и передает импульс вниз. Этот импульс, движущийся со скоростью звука, отражается обратно в передатчик от поверхности жидкости. Передатчик измеряет временную задержку между переданным и принятым эхо-сигналом, а бортовой процессор устройства вычисляет расстояние до поверхности жидкости.
Ультразвуковой датчик уровня выполняет расчеты для преобразования расстояния прохождения волны в меру уровня в резервуаре. Промежуток времени между запуском звуковой очереди и получением обратного эха, прямо пропорционален расстоянию между датчиком и жидкостью в сосуде.
Частотный диапазон ультразвукового уровнемера находится в диапазоне 15–200 кГц. Низкочастотные приборы используются для более сложных применений, таких как большие расстояния и измерения уровня твердого тела, а высокочастотные — для более коротких измерений уровня жидкости.
Для практического применения ультразвукового датчика уровня, необходимо учитывать ряд факторов.
Вот несколько ключевых моментов:
- Скорость звука через среду (обычно воздух), изменяется в зависимости от температуры. Преобразователь может иметь датчик температуры для компенсации изменений рабочей температуры, которые изменяют скорость звука и, следовательно, расчет расстояния, определяющий точное измерение уровня.
- Наличие пены/пыли на поверхности жидкости может выступать в качестве звукопоглощающего материала. В некоторых случаях поглощение может быть достаточным, чтобы исключить использование ультразвукового метода. Для повышения производительности в тех случаях, когда пена/пыль или другие факторы влияют на перемещение волны к поверхности жидкости и от нее, некоторые модели могут иметь направляющую луча, прикрепленную к преобразователю.
- Экстремальная турбулентность жидкости может вызвать колебания в показаниях прибора. Использование регулировки демпфирования в ультразвуковом датчике уровня или задержки отклика, может помочь преодолеть эту проблему. Трансивер обеспечивает демпфирование для управления максимальной скоростью изменения отображаемого уровня материала и флуктуацией выходного сигнала. Демпфирование замедляет скорость отклика дисплея, особенно когда жидкие поверхности находятся в состоянии перемешивания.
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс. Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
- Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).
Монтаж датчика на плату расширения для Ардуино
Куда подсоединять датчик? Как выбрать для него место? Есть ли вообще на нашей плате расширения свободное место? Сразу оговорюсь, что датчик можно посадить как на плату расширения, так и непосредственно на сами ножки Ардуино. А как их выбрать, мы сейчас узнаем. Итак.
Возьмём схему нашего готового шилда отсюда из раздела «схемы». Вот как это выглядит:
Это называется принципиальная схема. Принципиальная потому, что здесь в принципе показано, что к чему подключено, но реального расположения компонентов на плате эта схема не отражает. Зато её, по идее, легко и удобно читать. Мне изначально было неудобно, т.к. на торце у Ардуино по факту нет ни одной ножки, а на этой схеме мы видим на нём ножки D2-D6, что по началу просто рвало мне шаблон. Но если к этому привыкнуть, что схема настолько принципиальная
, что упрощает всё до состояния «квадратиков» и просто отвечает на вопрос «что к чему подключено» — тогда работать с ней становится уже легче.
Чтобы читать условные обозначения, вы можете воспользоваться кратким «словарём», но я рекомендую сделать это не сейчас, тем более что на нашей схеме отражены по большей части готовые компоненты, а не детали платы, для каждой из которых существует своё условное обозначение на схеме. Сейчас, не пугайтесь, мы попробуем найти на этой схеме «место» только для одного нового датчика. Обратите внимание, внизу схемы обозначены кнопки:
В комплекте их три, К1-К3. Мы их уже «втыкали» куда нужно, когда собирали радио по инструкции. Однако на плате есть ещё 2 гнезда «под кнопки»: К4 и К5. Выглядят они просто как четыре отверстия, однако обозначенные неодинаково. Нас интересует только те из пар отверстий, которые обозначены на плате квадратным контактом.
Хозяйке на заметку:
Почему у кнопок по два контакта, а мы используем по одному?
- Квадратные контакты ведут к линиям D5 и D6 Ардуино. Круглые – это «земля.»
- Для подключения кнопок нужны два контакта, т.к. при нажатии кнопки замыкается сигнальная линия (подтянута к питанию через резистор) и земля.
- При подключении датчика земля нужна только для питания. Землю мы чуть позже возьмём с разъёма Ардуино, поэтому в нашем случае вторые контакты не понадобятся
.
Вот так мы дополним схему датчиком (фотошоп мэд скиллз)
Задание:
посмотрите на принципиальную схему всего устройства радио ещё раз. Сколько и каких ножек у Ардуино ещё «свободны»? Можем ли мы повесить на этот Ардуино что-то ещё в рамках данного устройства, помимо нашего ультразвукового датчика? Ждём ваши ответы в комментариях.
Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм. ДхШхГ (Ш — без учета контактов подключения)
Рис. 5 Размеры ультразвукового датчика HC-SR04
- Внимание: ! Модуль не рекомендуется подключать непосредственно к подключенной к электропитанию плате микроконтроллера, необходимо отключить электропитание в момент подключения модуля , первым должен быть подключен вывод GND модуля, в противном случае,это может повлиять на нормальную работу модуля.
- ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.
Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта:
- https://life-prog.ru/view_msinv.php?id=62%D0%BC%D0%BE%D0%B6%D0%B5%D1%82
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой. Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:
Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
Датчик отправляет ультразвуковые импульсы и слушает эхо. На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров. Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
- Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта. Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта. Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.
- Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта. Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.
Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подробнее: https://www.kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx
- Контакты, по порядку слева направо, с лицевой стороны:
- Vcc – питание 5В
- Echo – выход
- Gnd –земля
Trig – вход
Процесс работы:
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.
Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах
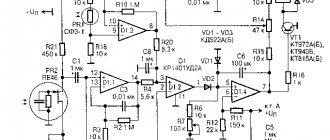
Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.
Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Прием и выделение электрических импульсов поступающих с преобразователя ультразвуковых сигналов TCT40-16R осуществляется микросхемой LM324 (обозначение на плате — U1 смотри схему) , который содержит 4 операционных усилителя. Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
МИКРОКОНТРОЛЛЕР ESP-8266 И УЛЬТРАЗВУКОВОЙ ДАТЧИК HC-SR04
Переделка ультразвукового датчика HC-SR04
Рис. 4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )
Рис. 5 Пространственная диаграмма излучения ультразвукового излучателя/приемника TCT40-16R/T (если бы мы видели ультразвук, то так бы мы видели распространение ультразвуковых волн в пространстве)
Характеристики ультразвукового излучателя/приемника TCT40-16R/T
1. Model: TCT40-16R/T (16 мм в диаметре) 2. Номинальная частота (Кгц): 40 КГц 3. Излучение At10v звукового давления (дб = 0.02mPa): ≥ 117dB 4. чувствительность Приемника at40KHz (дб = V/ubar): ≥-65dB 5. Электростатический потенциал at1KHz, < 1 В (PF): 2000 ± 30%
Ультразвуковые преобразователи справка 1
Ультразвуковые преобразователи справка 2
ПРИМЕНЕНИЕ
Эхолот. Рубрика «Как это работает?»
Ультразвуковые датчики Murata
Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Другие сферы применения
Ультразвуковые сенсоры применяют в различных областях:
- Для контроля физико-химических характеристик веществ. Принцип действия основан на сравнения скорости звука в проверяемом веществе с эталонным – расхождение указывает на изменения в веществе.
- Для контроля расхода жидких веществ в трубопроводах. Принцип действия основывается на сравнении скорости ультразвуковых колебаний по направлению потока и против него. Метод не требует помещение датчика внутрь трубопровода — сенсор крепится с наружной стороны.
- Для определения уровней жидких или сыпучих материалов. Принцип действия основан на отражении ультразвука, посылаемого датчиком, от границы раздела «газ – жидкий или сыпучий материал». При понижении уровня время прохождения колебаний меняется, и прибор сигнализирует об этом.
- Для охраны помещений. Принципов действия несколько:
- охранный датчик испускает ультразвуковое излучение. При появлении в зоне обнаружение объекта отраженный сигнал принимается датчиком. Далее он действует по выбранному алгоритму: включает сирену, подает сигнал на пульт охраны и т.д.;
- сигнал охранного датчика попадает на приемник, расположенный на некотором расстоянии. При прохождении объекта между приемником и излучателем сигнал прерывается, и сенсор действует по приведенному алгоритму.
Для надежности обычно применяют несколько ультразвуковых охранных датчиков, работающих на разных принципах.
- Пожарная безопасность. Ультразвуковой пожарный извещатель действует по тому же принципу, что и охранный. Реагирует не на объект, а на движение нагретого огнем воздуха. Отличается высокой чувствительностью. Измерители температуры газов и пожарные сигнализаторы, основанные на изменении скорости распространения при изменении температуры среды или появления дыма.
Ультразвуковой контроль качества материалов и изделий. Принцип действия основан на отличии скорости звука в разных средах и отражении ультразвука от границы сред. Обнаруживает точное расположение внутренних дефектов на глубине нескольких метров.
- Медицина. Проведение ультразвукового исследования для диагностики внутренних патологий. Принцип работы датчика основан том, что скорость прохождения ультразвуковых волн в тканях человека. Отраженный сигнал меняет длину волны в различных тканях организма. Визуализация сигнала на экране прибора дает возможность увидеть строение внутренних органов человека.
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
- Ultrasonic — самая популярная библиотека для HC-SR04.
- NewPing — отличается большей точностью и скоростью работы.
- Ультразвуковой дальномер URM37
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».
- Гаражный парктроник
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Применение сенсоров ультразвукового излучения в робототехнике
Главная задача, решаемая в робототехнике с помощью датчиков этого вида — ориентирование робота на местности, предотвращение столкновений и обеспечение обхода препятствий.
Достоинства систем ориентации, построенных на ультразвуковых датчиках:
- цена;
- проста в изготовлении, так как монтируется из легкодоступных элементов;
- при интегрировании в роботизированные устройства не требуется менять схему управления робота;
- универсальность;
- нечувствительность к неблагоприятным факторам окружающей среды: задымленность, запыленность, отсутствие света, высокая влажность.
Учитывая незначительную дистанцию действия сенсоров в воздушной среде, их применяют в пространствах ограниченного объема искусственного или естественного происхождения, с твердыми и ровными поверхностями. Это обеспечивает получение устойчивого эхо-сигнала. В таких условиях информация ультразвукового дальномера объективна. Для кругового обзора необходимо увеличение количества датчиков. Определение расстояние до преграды в движении, остановка и объезд достигается программными средствами.
Ультразвуковые сенсорные системы широко применяются в подводных роботах, являясь основными средствами контроля окружающего пространства. Здесь в качестве гидроакустических преобразователей используют магнитострикционные излучатели, обладающие большой акустической мощностью.
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
- (Tc): piezoceramics Ультразвуковой датчик
- (T): Категория t-общность
- (40): Центральная частота (кгц)
- (16): наружный диаметр? (мм)
- (T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
- (1): ID — 1,2, 3…
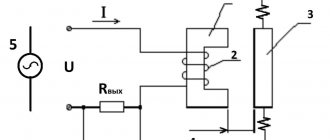
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта1). Номинальная частота (кГц): 40 кГц 2). излучать звук pressureat10V (= 0.02Mpa):? 117dB 3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB 4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30% 5). Диапазон обнаружения (м): 0.2 ~ 20 6).-6дБ угол направления: 80o 7). Обшивка материал: алюминий 8). Обшивка ЦВЕТ: серебристый
Литература
- Object detecting system of reflection type. US Patent 4,542,489. Опубл. Sept 17, 1985 (Naruse, Aisin Seiki Kabushiki Kaisha)
- Ultrasonic transducer. US Patent 4,636,997. Опубл. Jan 13, 1987 (Toyama, et al., Nippon Soken, Inc.)
- Ultrasonic transducer. US Patent 4,433,398. Опубл. Feb 21, 1984 (Kodera, et al., Nippon Soken, Inc.)
- Ultrasonic transducer. US Patent 4,754,440. Опубл. June 28, 1988 (Naruse, Aisin Seiki Kabushikikaisha)
- Piezoelectric transducer for transmitting or receiving ultrasonic waves. US Patent 4,755,975. Опубл. July 5, 1988 (Ito, et al., NGK Spark Plug Co., Ltd.)
- Ultrasonic distance sensor. US Patent 4,918,672. Опубл. April 17, 1990 (Iwabuchi, et al., Niles Parts Co., Ltd.)
- Ultrasonic obstacle sensor. US Patent 5,076,384. Опубл. Dec 31, 1991 (Wada, et al., Mitsubishi Denki Kabushiki Kaisha)
- Method and device for ultrasonic distance measuring. US Patent 5,508,974. Опубл. April 16, 1996 (Meyer, et al., Robert Bosch GmbH)
- Method and device for operating an ultrasonic sensor. US Patent 5,531,118. Опубл. July 2, 1996 (Knoll, et al., Robert Bosch GmbH)
- Ultrasonic sensor. US Patent 5,869,764. Опубл. Feb 9, 1999. (Schulte, Microsonic Gesellschaft fur Mikroelektronik und Ultraschalltechnik mbH)
- Apparatus for distance measurement by means of ultrasound. US Patent 6,166,995. Опубл. Dec 26, 2000 (Hoenes, Robert Bosch GmbH)
- Ultrasonic sensor. US Patent 6,250,162. Опубл. June 26, 2001. (Amaike, et al., Murata Manufacturing Co., Ltd.)
- Ultrasound sensor for distance measurement. US Patent 6,181,645. Опубл. Jan 30, 2001. (Li)
- Ultrasound sensor for distance measurement. US Patent 6,370,086. Опубл. April 9, 2002. (Li)
- Ultrasonic sensor and obstruction detector having accurate obstruction detection capabilities. US Patent 6,085,592. Опубл. July 11, 2000. (Kawashima, Denso Corporation)
- Overpaintable bumper with ultrasound transducer. US Patent 6,039,367. Опубл. March 21, 2000 (Muller, et al., ITT Manufacturing Enterprises, Inc.)
- Ultrasonic transducer. US Patent 6,374,676. Опубл. April 23, 2002 (Arnold, et al., Robert Bosch GmbH)
- Ultrasonic transducer. US Patent 6,465,935. Опубл. Oct 15, 2002 (Wannke, et al., Robert Bosch GmbH)
- Ultrasonic transceiver and vehicle’s surrounding obstruction sensor. US Patent 6,484,581. Опубл. Nov 26, 2002 (Nishimoto, et al., Mitsubishi Denki Kabushiki Kaisha)
- Ultrasonic sensor system and method having input capture for echo processing. US Patent 6,338,028. Опубл. Jan 8, 2002 (Shelton, et al., TRW Inc.)
- Ultrasound sensor. US Patent 6,520,019. Опубл. Feb 18, 2003 (Schon, et al., TRW Automotive Electronics & Components GmbH & Co. KG)
- Ultrasound sensor. US Patent 6,532,193. Опубл. March 11, 2003 (Fehse, et al., Robert Bosch GmbH)
- Ultrasonic sensor. US Patent 6,792,810. Опубл. Sept 21, 2004 (Kupfernagel, et al., Valeo Schalter und Sensoren GmbH)
- Ultrasonic sensor assembly for a vehicle reversing radar. US Patent 6,909,670. Опубл. June 21, 2005 (Li)
- Ultrasonic sensor. US Patent 7,004,031. Опубл. Feb 28, 2006 (Oda, et al., Denso Corporation, Nippon Soken, Inc.)
- Choosing an Ultrasonic Sensor for Proximity or Distance Measurement. Donald P. Massa, Massa Products Corp. Parts 1 & 2, Sensors, Feb — March 1999
- Ultrasonic Sensing for Challenging Environments. Kassan J., Morelli J. Pepperl+Fuchs Inc. Sensors, July 2005
Полезные ресурсы:
Ультразвуковой дальномер HC-SR04 подключение к Arduino
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://www.elecfreaks.com/store/download/product/Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_User_Guide.pdf
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www.arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2012/xz227_gm348/xz227_gm348/URM3.2_Mannual_Rev2.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
https://chinaultrasound.en.alibaba.com/product/60268805778-800581237/40Khz_TCT40_16R_T_Air_Ultrasonic_Ceramic_Transducer_Ultrasonic_Sensor.html
Краткие выводы
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.
Основные типы датчиков УЗИ:
- Конвексный датчик
- Микроконвексный датчик
- Линейный датчик
- Секторный датчик
- Фазированный секторный датчик
- Внутриполостной датчик (трансректальный / анальный, трансвагинальный, трансуретральный)
- Биплановый датчик
- 3D / 4D (Live-3D) датчик
- Матричный объемный датчик
- Карандашный доплеровский датчик
- Чреспищеводный TEE датчик
- Видеоэндоскопический датчик
- Биопсийные датчики
- Катетерный (интраоперационный) датчик
- Внутрисосудистый датчик
- Лапароскопические датчики
- Монокристальные датчики
- Механические датчики
- Офтальмологические датчики
- Транскраниальный датчик
- Отолорингологические датчики
- Ветеринарные датчики
- Плоскостные датчики
Работа линейных, конвексных и секторных датчиков
В линейных и конвексных датчиках пьезокристаллы излучают группами поочередно, пока не отработают все кристаллы от начала пьезокристаллической матрицы до конца. Один кадр на дисплее обновится тогда, когда все группы поочередно отправят и примут ультразвуковой сигнал.
В секторных фазированных датчиках все кристаллы излучают почти одновременно. Специально вводятся небольшие электронные задержки сигнала на каждый кристалл для того, чтобы направлять сканирующий луч. Изображение на дисплее обновится тогда, когда луч просканирует весь сектор обзора.