16.03.2020
- Что такое шаговый двигатель
- Принцип работы шагового электродвигателя
- Какие бывают шаговые двигатели: рассмотрим их разновидности
- Принцип управления шаговым двигателем
- Достоинства и недостатки
- Важные характеристики
- Подключение
- Виды управления
- Полезные ролики по теме
Рассмотрим «сердце» фрезеровочных, шлифовальных, универсальных и многих других станков. Под прицелом внимания – шаговый двигатель: устройство и принцип работы, схема и сферы применения, типы конструкции и варианты программирования. Расскажем все эти и другие важные моменты, чтобы вы понимали, что он из себя представляет и какую его модель выбрать в соответствии со спецификой решаемых задач.
Сразу отметим, что предмет нашего интереса сегодня используется не только в сложном оборудовании, решающем ответственные задачи, но и в сравнительно простых производственных механизмах и даже в бытовых приборах. Он востребован во всех тех случаях, когда необходимо поддерживать достаточно скоростное вращение вала, одновременно сочетая его с точным позиционированием, и поэтому будет оставаться актуальным еще долгие годы.
Что такое шаговый двигатель
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
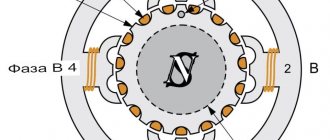
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:
Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
Какие бывают шаговые двигатели: рассмотрим их разновидности
Режимы работы мотора определяют 2 характеристики: величина шага и усилие, прикладываемое для перемещения. Варьировать их можно, меняя метод подключения, строение обмоток или вала.
Соответственно, классификация приводов осуществляется по следующим параметрам:
- По конструкции ротора – его строение играет ключевую роль, так как от него зависит специфика взаимодействия с электромагнитным полем статора. Выделяют 3 варианта, причем каждый из них мы рассмотрим ниже, со всеми особенностями, плюсами и минусами.
- По виду (числу обмоток) – с ростом их количества вращение становится более плавным, но одновременно увеличивается и стоимость силового агрегата, хотя крутящий момент остается неизменным. Могут быть уни- и биполярными, в первом случае подключаются с ответвлением от средней точки, во втором – через 4 выхода.
Теперь обратим внимание на строение вала.
Шаговые приводы с переменным магнитным сопротивлением
Как следует хотя бы из названия, собственный источник постоянного поля у него отсутствует; кроме того, его ротор сделан из магнитомягкого материала и отличается зубчатой формой. Через ближайшие к статору участки контакта и осуществляется замыкание – с притяжением к полюсам, обеспечивающее дискретные движения. По своему исполнению он похож на шестерню, в которой сила вращения появляется за счет противоположных пар и попеременного протекания тока.
Ключевое преимущество – нет стопорящего момента, ведь поле, в других случаях способное воздействовать на арматуру, банально отсутствует. Вы получаете синхронный силовой агрегат, в котором ротор и статор поворачиваются одновременно и в унисон.
Обладая теми же размерами, что и другие разновидности, данные модели развивают меньший крутящий момент. Перемещение осуществляется на 5-15 градусов, а это сравнительно грубо и, зачастую, неточно. Так объясняется несколько ограниченная сфера применения реактивного шагового двигателя: где используется мотор данного типа, так в специфических станках, все детали которых производитель изготавливает самостоятельно.
С постоянными магнитами
Опять же, сразу ясно, в чем их особенность – в наличии собственного источника постоянного поля, являющегося основой подвижного элемента и содержащего 2 и более полюсов. Именно последние и обеспечивают вращение ротора за счет подачи напряжения на обмотки и притяжения/отталкивания.
Перемещение может осуществляться либо полностью перпендикулярно предыдущему положению, либо наполовину; увеличивая число магнитных пар, можно регулировать длину, а значит и количество дискретных движений, доводя их общее число до 48 за полный оборот. Это позволяет очень точно устанавливать рабочий инструмент в нужное место и является конкурентным преимуществом силового агрегата.
Гибридные
Конструкция шагового двигателя этого типа была разработана, чтобы объединить достоинства двух предыдущих. Представляет собой цилиндрический источник поля, намагниченный продольно, то есть пару полюсов с особенными поверхностями – с нанесенными зубцами. Последние обеспечивают отличное удерживание, не снижая крутящий момент.
Практические плюсы:
- малый шаг – 0,9-50 – что позволяет прецизионное позиционирование за счет большого количества дискретных перемещений (до 400 за один цикл);
- высокая скорость и плавность работы.
Да, они дороже двух предыдущих видов, так как сложнее в изготовлении, но это относительный минус. Благодаря своим преимуществам это наиболее распространенные сегодня варианты, использующиеся в самых ответственных случаях: устанавливаются в ЧПУ-станках, в приборах современной робототехники, на медицинском и офисном оборудовании.
Шаговые синхронные двигатели активного типа
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
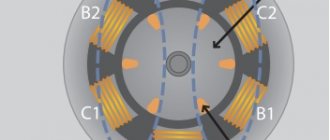
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Принцип управления шаговым двигателем
Выделяют 3 основных режима, задаваемых драйвером, то есть чипом, посылающим сигналы. Вот они:
- полно-,
- полу-,
- и микрошаговый.
Каждый из них обладает своими особенностями. Первый из них мы уже косвенно описывали выше, и он сводится к поочередной коммутации фаз; причем только одна из них в любой из моментов может быть подключена к источнику – они не должны перекрывать друг друга. Этот закон отражен в английском названии метода – one phase – one step. Точки равновесия при этом обязаны совпадать с направлением полюсов статора.
Минус здесь в том, что одновременно задействована лишь половина обмоток (у биполярного агрегата) или даже четверть (у униполярного).
Также можно выбрать принцип работы шагового мотора, при котором питание будет подаваться сразу на все витки. Он известен как способ two-phase-on (full step), и при нем ротор остается в состоянии равновесия между силовыми линиями неподвижной части вала, причем смещенным на половину дискретного движения. Благодаря такому решению крутящий момент может быть повышен до 35-40%.
Полушаговый режим
На каждом втором перемещении задействована одна фаза, в то время как между ними – пара. Это дает возможность вдвое уменьшить величину угла и, следовательно, в 2 раза повысить количество переходов в течение оборота. Удобен именно тем, что сравнительно просто обеспечивает результат, поэтому достаточно распространен.
При таком устройстве и работе шагового электродвигателя важно помнить, что его остановка должна производиться с формированием тока удержания – небольшого, намного меньше номинального, но все равно необходимого и важного. Он нужен, чтобы автоматически фиксировать положение ротора после полного отключения напряжения. Иначе подвижный вал будет в свободном состоянии и при механическом воздействии (которое весьма вероятно) сместится, чего нельзя допустить. Зато при его подаче отпадает потребность в организации тормозной системы, добавлении механического фиксатора или другого элемента, способного стать «слабым звеном», то есть снизить общую надежность силового агрегата.
Микрошаговый режим
Рассмотрим, как в этом случае действует пошаговый двигатель: принцип работы сводится ко включению двух фаз с неравномерным распределением тока обмоток. Благодаря этому смещается магнитное поле статора, а вслед за ним и позиция ротора. Диспропорция между переключениями отличается маленькой дискретностью.
За счет такого подхода осуществляются крайне малые шаги – в 1/3 от полного или еще короче, числом до 1000 за оборот. Это позволяет максимизировать точность установки инструментов, хотя и значительно усложняет систему контроля. На практике данное решение востребовано в особо сложных и ответственных случаях, при создании и использовании сравнительно дорогих, но прецизионных станков.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Достоинства и недостатки
Мы уже рассмотрели, как устроен, работает, и где применяется шаговый двигатель, что это такое, но наше описание было бы неполным без анализа плюсов и минусов его стандартных моделей.
В списке объективных преимуществ:
- Поддержка полного крутящего момента при постепенном уменьшении скорости хода, даже перед остановкой.
- Точное позиционирование в рамках выбранного режима, причем без какой-либо обратной связи; количество дискретных перемещений задается углом поворота.
- Положение силового агрегата фиксируется сразу же в момент прекращения движения – ток удержания обеспечивает отсутствие инерционных сдвигов.
- Быстрый старт и реверс, оперативное переключение.
- Регулировать вращение можно прецизионно, возвратного влияния при этом, опять же, не наблюдается.
- Высокий уровень общей надежности, отчасти объясняется тем, что нет коллекторных щеток и других элементов, которые могли бы стать «слабым звеном».
В числе практических недостатков:
- Принцип действия шагового двигателя может сопровождаться чересчур сложным управлением.
- Скорость не очень-то высока номинально.
- Иногда возникает резонанс, что чревато сбоями в установке инструментов.
- Удельная мощность сравнительно мала.
- Под воздействием механических перегрузок возможна потеря позиционирования.
Очевидно, что плюсы значительнее минусов, к тому же, есть области, в которых без рассматриваемых силовых агрегатов просто не обойтись, когда они в разы превосходят коллекторные. Это те случаи точной механики, в которых нужно перемещать узлы с мгновенными остановками и быстрым изменением вектора движения.
Важные характеристики
- С точки зрения электротехники, пошаговый привод – это достаточно сложное устройство, обладающее целым рядом параметров. Вот основные из них:
- Число полных шагов в течение одного цикла – от него зависит точность, плавность хода, разрешающая способность; у современных моделей должно быть на уровне 200-400.
- Угол дискретного перемещения (поворота вала) – рассчитывается как 360 0/количество отдельных передвижений за оборот; аналогичный предыдущему показатель, просто представленный в другом виде; его актуальные значения – 1,8-0,9 градусов.
- Пробивное напряжение – максимальное, по достижении которого нарушается изоляция, определяет безопасность использования.
- Допустимое постоянное напряжение – измеряется в статическом режиме на витках; в ряде случаев не приводится, но и тогда его можно рассчитать по закону Ома.
- Номинальный ток – наибольший из возможных для безопасного и бесперебойного функционирования силового агрегата.
- Сопротивление обмотки – оно, вместе с предыдущей характеристикой, говорит о том, какое количество Вольт можно подавать на пошаговые электродвигатели.
- Индуктивность фазы – определяет скорость нарастания тока; приобретает особенно важную роль при быстром вращении вала.
- Сопротивление изоляции – между обмотками и корпусом.
Отдельным семейством параметров являются моменты:
- крутящий – зависит от частоты вращения; указывается максимальный для данного силового агрегата;
- инерции – чем он меньше, тем быстрее разгон;
- стопорный – нужен для прокручивания вала в случае отсутствия питания;
- удерживающий – активен при полной остановке и запитывании номинальным током двух фаз.
Подключение
Выбранное устройство и схема работы шагового двигателя зависят от таких факторов:
- общее число проводов;
- характер запуска.
Есть модели с 4, 5, 6, 8 соединителями; «четверка» подходит только для биполярных, так как у них пара фазных обмоток с двумя коннекторами и нужно устанавливать непрерывные связи. «Шестерка» обладает еще и центр-кранами на каждом витке и поэтому универсально применима ко всем силовым агрегатам.
Типичные варианты коммутации выглядят следующим образом:
Для беспроблемной эксплуатации важно помнить правила подачи номинального напряжения, а также изменения скорости крутящего момента и понижения линейного.
Руководство покупателя: что следует учитывать перед выбором шагового драйвера для вашего ЧПУ
- Сначала выберите свой шаговый двигатель: не выбирайте шаговый драйвер, пока не решите, какие шаговые двигатели вы будете использовать.
- Пиковый ток шаговых двигателей: это основное значение, которое определяет ваш драйвер. В идеале следует приобрести шаговый драйвер с максимальным номинальным током, который в 1,4 раза больше, чем у шагового двигателя. Если это не вариант, убедитесь, что ток вашего драйвера как минимум такой же, как у двигателя, чтобы получить максимальный крутящий момент.
- Источник питания: получите надежный источник питания с номинальным напряжением, соответствующим вашему шаговому драйверу, для максимальной производительности. Для получения высоких крутящих моментов на высоких оборотах необходимо значительно повысить напряжение.
- Количество драйверов: количество необходимых шаговых драйверов совпадает с количеством шаговых двигателей, которые вы планируете использовать.
- Резонанс и шум: при увеличении тока ненадежные шаговые драйверы приводят к шуму и вибрации. Вот почему так важен антирезонанс.
Виды управления
Помимо уже рассмотренных режимов – полно-, полу- и микро-, – есть и другие, определяющие, как сигналы подаются на полюса и, соответственно, как работает шаговый мотор. Рассмотрим два принципиально разных их типа.
Без контроллера
Реализуется благодаря Н-мосту (часто именно так и называется), позволяющему практически мгновенно переключать полярность и обеспечивать быстрый реверс. Система выстраивается на транзисторах и/или микросхемах: выбранные ЭРЭ гарантируют логическую цепочку, по которой перемещаются ключи. Подходит для бесколлекторных моделей.
Согласно данной схеме, напряжение идет от источника питания к мосту. Контакты включаются попарно (S1-S4 и S3-S2), благодаря чему ток проходит через обмотки, запуская вращение в нужную сторону.
С контроллером
Взглянем на него подробнее, ведь он определяет, как работает и что такое шаговый электродвигатель: это электронный блок, который формирует последовательность сигналов и посылает их на катушки статора. Чтобы он не вышел из строя при возникновении аварийной ситуации (например, при коротком замыкании), выводы привода снабжают диодами, не пропускающими обратные импульсы. Дает возможность реализовать самые разные режимы.
Популярные схемы управления
Предлагаем вашему вниманию два интересных варианта:
Ключевое преимущество здесь – помехозащищенность. Как прямой, так и инверсный сигнал подключаются к своим полюсам напрямую. При ее воплощении в жизнь необходимо озаботиться экранированием сигнального соединителя. Подходит, когда планируете с низкой мощностью использовать шаговый электродвигатель: принципы работы будут выполняться даже при условии высоких нагрузок.
Еще одно достойное решение:
Ключевая особенность – объединение вводов, подключаемых к положительному полюсу. Если при этом будет подаваться питание, превышающее 9 В, понадобится дополнить схему резистором-ограничителем тока. В общем же она очень удобна тем, что обеспечивает возможность строго и точно задавать скорость и количество перемещений в течение оборота.
Если на один его D-вывод подавать логическую 1, а на остальных оставлять 0, транзистор откроется, что обеспечит прохождение сигнала к катушке. Вот таким нехитрым способом осуществляется дискретное передвижение.
Советуем на практике посмотреть, что собой представляет шаговый двигатель, назначение устройства и принцип действия – попробуйте самостоятельно задать ему некоторые команды. Взяв последнюю разработку за основу, не проблема выполнить печатную плату, под заказ или даже своими силами, впаяв в нее необходимые ЭРЭ (почти все диоды, транзисторы, резисторы можно извлечь из отслужившей свое техники). Управление возможно осуществлять с обычного компьютера.
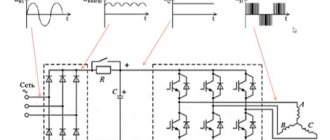
ОБОРУДОВАНИЕ ТЕХНОЛОГИИ РАЗРАБОТКИ
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.
Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы.
В функцию драйверов входит:
- обеспечение необходимого тока и напряжения на фазных обмотках двигателя;
- коммутация обмоток; включение;
- выключение;
- смена полярности;
Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:
- обеспечение быстрого нарастания тока при включении и быстрого спада при выключении;
- уменьшение тока для фиксации положения остановленного двигателя;
- защитные функции;
- формирование тока и напряжения обмоток для микрошагового режима;
- и многие другие.
Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости.
По схеме подключения шаговые двигатели делятся на униполярные и биполярные. Драйверы для этих двух вариантов двигателей принципиально отличаются.
- Драйвер униполярного шагового двигателя.
- Схема драйвера униполярного шагового двигателя.
- Драйвер биполярного шагового двигателя.
- Схема драйвера биполярного шагового двигателя.
- Драйвер биполярного шагового двигателя L298N.
- Характеристики микросхемы L298N на русском языке.
- Схема включения драйвера L298N.
Драйвер униполярного шагового двигателя.
В униполярном режиме могут работать двигатели, имеющие следующие конфигурации обмоток.
Напомню принцип управления униполярным шаговым двигателем. Четыре обмотки с общим проводом, подключенным к одному полюсу источника питания. Если другие выводы обмоток последовательно коммутировать к другому полюсу источника, то ротор двигателя будет вращаться.
Для коммутации обмоток таким способом достаточно всего четырех ключей, замыкающих обмотки на землю. Схемы коммутации обмоток двух предыдущих вариантов двигателей выглядят так.
Если последовательно замыкать ключи 1, 2, 3, 4, то ротор двигателя будет вращаться.
Схема драйвера униполярного шагового двигателя.
Практически ключи можно выполнить на биполярных транзисторах, но предпочтительнее использовать низкопороговые MOSFET транзисторы. Я применяю транзисторы IRF7341. Это MOSFET транзисторы с параметрами:
- максимально допустимый ток 4 А;
- предельное напряжение 55 В;
- сопротивление в открытом состоянии 0,05 Ом;
- порог включения 1 В;
- выполнены в миниатюрном корпусе SO-8;
- в корпусе два транзистора.
Крайне удобный вариант для использования в драйвере униполярного шагового двигателя.
- Нет необходимости в радиаторах охлаждения ключей;
- очень низкое падение напряжения на открытом транзисторе;
- малые размеры;
- всего два 8ми выводных корпуса для драйвера двухфазного шагового двигателя.
На биполярных транзисторах ключи с такими параметрами создать не возможно. Есть много других вариантов MOSFET транзисторов для ключей, например IRF7313 ( 6 А, 30 В, 0,029 Ом).
Схема ключа на MOSFET транзисторе для одной фазы выглядит так.
Ключ управляется непосредственно от микроконтроллера логическими уровнями KMOП или TTL ( 0 / +5 В). При управляющем сигнале высокого уровня (+5 В) ключ открыт, и через обмотку фазы идет ток. Диод шунтирует обмотку двигателя в обратном направлении. Он необходим для защиты транзистора от бросков напряжения самоиндукции при выключении фазы. Для управления двигателями на значительных скоростях вращения, лучше использовать высокочастотные диоды, например, FR207.
Вот фрагмент схемы подключения униполярного шагового двигателя к микроконтроллеру.
Защиты от коротких замыканий в этой схеме нет. Реализация защиты значительно усложняет драйвер. А замыканий обмоток шаговых двигателей практически не бывает. Я не встречался с таким явлением. Да и на фоне неприятности по поводу сгоревшего дорогого двигателя, замена транзистора не выглядит проблемой.
Кстати, механическое заклинивание вала шагового двигателя не вызывает недопустимых токов в ключах драйвера и защиты не требует.
А это изображение платы контроллера униполярного шагового двигателя с PIC контроллером фирмы Microchip.
Простая плата с восьми разрядным микроконтроллером PIC18F2520 управляет:
- двумя шаговыми двигателями с током фазы до 3 А;
- двумя ШИМ ключами для электромагнитов;
- считывает состояние 4х датчиков;
- обменивается данными по сети с центральным контроллером.
Этот контроллер используется в составе системы управления шаговыми двигателями практически во всем фасовочном оборудовании фирмы ”РОСТ”.
Несмотря на простоту контроллера, реализованы следующие режимы управления:
- полно-шаговый, одна фаза на полный шаг;
- полно-шаговый, две фазы на полный шаг;
- полу-шаговый;
- фиксацию положения двигателя при остановке.
К достоинствам управления шаговым двигателем в униполярном режиме следует отнести:
- простой, дешевый, надежный драйвер.
К недостаткам:
- в униполярном режиме крутящий момент примерно на 40 % меньше по сравнению с биполярным режимом.
Пример практической схемы простого контроллера униполярного шагового двигателя.
Статья о подключении униполярного шагового двигателя к плате Ардуино.
Драйвер биполярного шагового двигателя.
В биполярном режиме могут работать двигатели, имеющие любые конфигурации обмоток.
У биполярного двигателя по одной обмотке для каждой фазы. Обычно две обмотки AB и CD. В первых двух вариантах четыре обмотки соединяются так, что получается две. Обмотки по очереди подключаются к источнику питания в одной полярности, затем в другой.
Драйвер биполярного двигателя должен обеспечивать сложную коммутацию. Каждая обмотка:
- подключается в прямой полярности к источнику напряжения;
- отключается от источника напряжения;
- подключается с противоположной полярностью.
Схема коммутации одной обмотки биполярного двигателя выглядит так.
Для обеспечения двух полярных коммутаций от одного источника питания требуется 4 ключа. При замыкании 1 и 2 ключей обмотка подключается к источнику питания в прямой полярности. Замыкание 3 и 4 ключей подает на обмотку обратную полярность напряжения.
Сложность драйвера биполярного шагового двигателя вызвана не только большим числом ключей ( 4 ключа на обмотку, 8 ключей на двигатель), но и:
- сложное управление верхними ключами ( 1 и 4) от логических сигналов “привязанных” к земле;
- проблемы со сквозными токами при одновременном открывании ключей одного плеча ( 1,3 или 2,4).
Сквозные токи могут возникать из-за не одинакового быстродействия нижнего и верхнего ключа. К примеру, нижний ключ уже открылся, а верхний – не успел закрыться.
Схема драйвера биполярного шагового двигателя.
Реализовать схему драйвера биполярного шагового двигателя на дискретных элементах довольно сложно. Могу показать мою схему, которая подключает биполярный двигатель к униполярному драйверу. Эта схема используется для управления биполярными двигателями от контроллера, приведенного в качестве примера в предыдущей главе.
Схема достаточно простая. Проблема сквозных токов решается за счет резисторов 0.22 Ом в коммутируемых цепях. В момент коммутаций MOSFET транзисторов, верхний и нижний ключ оказываются одновременно открытыми на короткое время. Эти резисторы и ограничивают сквозной ток. К сожалению, они ограничивают и рабочий ток двигателя. Поэтому, несмотря на мощные транзисторы, драйвер по такой схеме можно использовать для токов коммутации не более 2 А. Схема не требует диодов для защиты от эдс самоиндукции обмоток, потому что эти диоды интегрированы в MOSFET транзисторы.
Гораздо удобнее и практичнее использовать интегральные драйверы биполярного шагового двигателя. Самым распространенным из них является микросхема L298N.
Драйвер биполярного шагового двигателя L298N.
Описания этой микросхемы на русском языке практически нет. Поэтому привожу параметры L298N достаточно подробно, по официальным материалам производителя этой микросхемы – компании STMicroelectronics (datasheet l298n.pdf).
L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.
- Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
- Сигналы управления имеют TTL совместимые уровни.
- Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
- Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
- Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
- Микросхема имеет защиту от перегрева на уровне + 70 °C.
Структурная схема L298N выглядит так.
Микросхема выполнена в 15ти выводном корпусе с возможностью крепления радиатора охлаждения.
Назначение выводов L298N.
| 1 | Sense A | Между этими выводами и землей подключаются резисторы — датчики тока для контроля тока нагрузки. Если контроль тока не используется, они соединяются с землей. |
| 15 | Sense B | |
| 2 | Out 1 | Выходы моста A. |
| 3 | Out 2 | |
| 4 | Vs | Питание нагрузки. Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 5 | In 1 | Входы управления мостом A. TTL совместимые уровни. |
| 7 | In 2 | |
| 6 | En A | Входы разрешения работы мостов. TTL совместимые уровни. Низкий уровень сигналов запрещает работу моста. |
| 11 | En B | |
| 8 | GND | Общий вывод. |
| 9 | Vss | Питание логической части микросхемы (+ 5 В). Между этим выводом и землей должен быть подключен низкоимпедансный конденсатор емкостью не менее 100 нФ. |
| 10 | In 3 | Входы управления мостом B. TTL совместимые уровни. |
| 12 | In 4 | |
| 13 | Out 3 | Выходы моста B. |
| 14 | Out 4 |
Предельно допустимые параметры L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания | 50 В |
| Vss | Напряжение питания логики | 7 В |
| Vi, Ven | Напряжение логических входов | -0,3…7 В |
| Io | Выходной ток (для каждого канала)
| 3 А 2,5 А 2 А |
| Vsens | Напряжение датчиков тока | -1…2,3 В |
| Ptot | Мощность рассеивания (температура корпуса 75°C) | 25 Вт |
| Top | Рабочая температура кристалла | -25…130 °C |
| Tstg | Температура хранения | -40…150 °C |
Параметры расчетов тепловых режимов.
| Обозначение | Параметр | Значение |
| Tth j-case | Тепловое сопротивление кристалл-корпус | 3 ºC/Вт |
| Tth j-amb | Тепловое сопротивление кристалл-окружающая среда | 35 ºC/Вт |
Электрические характеристики драйвера L298N.
| Обозначение | Параметр | Значение |
| Vs | Напряжение питания (вывод 4) | Vih+2.5 …46 В |
| Vss | Питание логики | 4,5… 5 …7 В |
| Is | Потребляемый ток покоя (вывод 4)
| 13 … 22 мА 50 … 70 мА 4 мА |
| Iss | Потребляемый ток покоя (вывод 9)
| 24 … 36 мА 7 … 12 мА 6 мА |
| Vil | Входное напряжение низкого уровня (выводы 5, 7, 10, 12, 6, 11) | -0,3 … 1,5 В |
| Vih | Входное напряжение высокого уровня (выводы 5, 7, 10, 12, 6, 11) | 2,3 … Vss В |
| Iil | Входной ток низкого уровня (выводы 5, 7, 10, 12, 6, 11) | -10 мкА |
| Iih | Входной ток высокого уровня (выводы 5, 7, 10, 12, 6, 11) | 30 … 100 мкА |
| Vce sat (h) | Напряжение насыщения верхнего ключа
| 0,95…1,35…1,7 В 2 … 2,7 В |
| Vce sat (l) | Напряжение насыщения нижнего ключа
| 0,85…1,2…1,6 В 1,7 … 2,3 В |
| Vce sat | Общее падение напряжения на открытых ключах
| 1,8 … 3,2 В 1,8 … 4,9 В |
| Vsens | Напряжение датчиков тока (выводы 1, 15) | -1 … 2 В |
| Fc | Частота коммутаций | 25 … 40 кГц |
Схема подключения шагового двигателя к микроконтроллеру с помощью драйвера L298N.
Диаграмма работы этой схемы в полношаговом режиме выглядит так.
Если не используются разрешающие входы и датчики тока, схема выглядит так.
А вот фрагмент схемы контроллера биполярного шагового двигателя.
По функциям это аналог контроллера описанного в главе про униполярные двигатели, только для биполярного. Он также собран на PIC контроллере фирмы Microchip и управляет двумя биполярными шаговыми двигателями с током фаз до 2 А. Функциональные возможности и режимы управления двигателем те же.
К достоинствам управления шаговым двигателем в биполярном режиме следует отнести:
- крутящий момент примерно на 40 % больше по сравнению с униполярным режимом.
- можно подключать шаговые двигатели с любой конфигурацией обмоток.
К недостаткам:
- сложный драйвер.
Еще одна схема контроллера шагового двигателя.
Поддержать проект
0
Автор публикации
не в сети 5 дней
Эдуард
236
Комментарии: 1789Публикации: 183Регистрация: 13-12-2015