Конструктивное и техническое построение синхронных электродвигателей обуславливает особенности в их функционировании и использовании. Одно из основных отличий машин этого типа состоит в невозможности их запуска при подключении напрямую к питающей сети.
Синхронные двигатели, также как и асинхронные машины, относятся к электроприводам переменного тока, преобразующим электроэнергию в механическое перемещение вала. Ввиду иного принципа действия существует ряд обязательных условий для корректной работы и эксплуатации. Одним из таких требований является запуск электрооборудования.
Назначение и конструктивное исполнение
Прежде чем перейти к подробному рассмотрению процесса запуска синхронного двигателя (СД) не лишним будет кратко повторить основные аспекты теории. Что такое СД, как взаимодействуют его элементы, какие виды бывают и почему этот тип эл/приводов так называют. После этого можно рассмотреть способы пуска.
Синхронный двигатель (СД) – электрооборудование, работа которого обеспечивается электродвижущей силой, возникающей при взаимодействии магнитных полей статорного и роторного механизма. Этот принцип является основополагающим для конструирования электромоторов разных видов. Несмотря на единый подход, приводное оборудование имеет свои отличия.
Главная особенность заключается в конструкции подвижного механизма и принципе его вращения. В зависимости от требуемой мощности ротор может:
- содержать постоянные магниты и быть инициатором магнитоэлектрического возбуждения;
- представлять собой электромагниты, инициирующие электромагнитное возбуждение.
Первый вариант применяется для электромашин небольшой мощности. Постоянные магниты изготавливаются из магнитотвердых материалов, способных сохранять состояние намагниченности. Они могут иметь как встроенное, так и поверхностное расположение на роторе.
Второй вид исполнения роторного блока предполагает устройство ферромагнитного сердечника с электрообмоткой. При нахождении под напряжением такая система является источником магнитного потока, взаимодействующего с полем статора.
Определение синхронизма, то есть одинаковости, основано на равенстве частоты оборотов ротора и магнитного поля статора. В этом состоит ключевое отличие принципа действия электрооборудования, определяющее его технические возможности, особенности эксплуатации и область применения. Этот же фактор напрямую влияет на пуск синхронных двигателей.
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Аспекты запуска
Принцип работы СД накладывает ряд требований, без выполнения которых не только плавный пуск, но и сам запуск синхронного эл/мотора невозможен. В СД вращающееся поле создается трехфазным током в цепях статора. При этом мощность, развиваемая на валу электродвигателя, компенсируется мощностью, поступающей из питающей сети. То есть взаимодействием тока статорного устройства с полем роторного механизма инициируется возникновение крутящего момента.
Как уже упоминалось, скорости ротора и поля статорного узла синхронны. При возникновении разницы в какой-то период времени полюса роторно-статорного механизма расположатся друг напротив друга. В результате магнитная связь нарушится, поскольку одноименные полюса будут отталкиваться. Ротор перестанет испытывать действие крутящего момента и остановится. Поэтому обеспечение одновременности вращения для синхронного двигателя является основополагающим условием его функционирования.
Но осуществление самостоятельного пуска в работу с прямым сетевым подключением невозможен. Роторный механизм по причине своей инерционности не способен быстро достичь частоты поля статора, тогда как вращение последнего устанавливается одновременно с подключением к сети электропитания. Поэтому между полюсами возбужденного роторного узла и вращающегося поля устойчивая связь, создающая вращающий момент, не возникает.
Преимущества и недостатки
Конструктивно синхронные двигатели сложнее асинхронных, но они имеют ряд преимуществ:
- Работа синхронных электродвигателей в меньшей степени зависит от колебания напряжения питающей сети.
- По сравнению с асинхронными, они имеют больший КПД и лучшие механические характеристики при меньших габаритах.
- Скорость вращения не зависит от нагрузки. То есть колебания нагрузки в рабочем диапазоне не влияют на обороты.
- Могут работать со значительными перегрузками на валу. Если возникают кратковременные пиковые перегрузки, повышением тока в обмотке возбуждения компенсируют эти перегрузки.
- При оптимально подобранном режиме тока возбуждения, электродвигатели не потребляют и не отдают в сеть реактивную энергию, т.е. cosϕ равен единице. Двигатели, работая с перевозбуждением, способны вырабатывать реактивную энергию. Что позволяет их использовать не только в качестве двигателей, но и компенсаторов. Если необходима выработка реактивной энергии, на обмотку возбуждения подается повышенное напряжение.
При всех положительных качествах синхронных электродвигателей у них имеется существенный недостаток – сложность пуска в работу. Они не имеют пускового момента. Для запуска требуется специальное оборудование. Это долгое время ограничивало использование таких двигателей.
Методы включения
Исходя из того, что прямой пуск невозможен, включение в рабочий процесс синхронного двигателя осуществляется с выполнением дополнительных мероприятий. Вне зависимости от способов пуска в действие электропривода суть каждого заключается в предварительном приведении подвижной части в движение с оборотами, близкими к частоте основного поля.
При пуске поток настолько медленно перемещается относительно магнитных центров крутящегося вала, что при подключении возбуждающей электрообмотки к источнику питания между роторными полюсами и полем статора устанавливается магнитная связь. Именно она обеспечивает возникновение одинакового электромагнитного момента. Под его действием вал электромотора втягивается в синхронизм.
Существуют несколько способов пуска синхронных двигателей. Практическое применение получили три из них:
- посредством вспомогательного электрооборудования;
- асинхронный, в том числе автотрансформаторный и реакторный пуск;
- частотный пуск синхронного двигателя.
Каждая схема пуска синхронного двигателя имеет свои достоинства и недостатки относительно сложности конструктивного и технического исполнения, финансовых затрат, габаритов приводных узлов. Поэтому там, где оптимальным будет, например, реакторный пуск, более дорогостоящий частотный разумнее не применять. Какой способ станет оптимальным, зависит от множества факторов.
Пуск и остановка синхронного двигателя должны выполняться с соблюдением определенной последовательности действий и условий. Поэтому для снижения риска выхода из строя электропривода на старте предусматривается система защиты синхронного двигателя от затянувшегося включения. А на стадии остановки соблюдают следующий алгоритм:
- снижают ток возбуждения до величины равной минимальным токовым параметрам статора;
- отключают статорный узел;
- размыкают возбуждающую электроцепь.
Отклонение от этой последовательности чревато скачком токовых величин в статоре, перенапряжениям и, как следствие, нарушением целостности изоляции.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время
Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий
Старт при помощи вспомогательного оборудования
Пуск в ход синхронного двигателя с дополнительным приводом аналогичен процессу включения синхронного генератора на параллельную работу. Фактически запуск осуществляется с помощью вспомогательного (разгонного) электромотора. При этом вал возбужденного электродвигателя приводится во вращение, разгоняется до требуемой частоты и через синхронизирующее устройство подключается к электросети. Затем вспомогательный привод отключается.
Подобный способ пуска предусматривает использование машины значительно меньшей мощности, составляющей 5-15% от мощности СД. Применение пускового электропривода большей несущей способности, достаточной для разгона нагруженного мотора, нерационально с точки зрения громоздкости и экономичности. Поэтому этим методом осуществляется пуск эл/двигателей или без нагрузки или при ее незначительной величине.
Процесс пуска синхронного двигателя выполняется асинхронным мотором с фазным ротором с числом полюсов на два меньше, по сравнению с их количеством у СД. Это необходимо для разгона вала приводимого механизма до требуемых оборотов. Регулирование скорости асинхронной машины обеспечивают регулировочным реостатом. На практике этот способ пуска применяют только для мощных машин, т.к. такой тип привода для моторов, например, 6кв не рационален.
Применение сопротивления при пуске
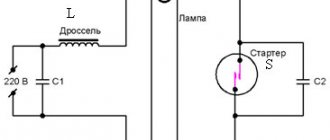
Метод применим для асинхронных двигателей, подключаемых к однофазной сети, и имеющих первичную дополнительную обмотку с короткозамкнутым ротором. Так называют мотор с расщепленной фазой, электроцепь которого имеет высокое активное сопротивление.
Чтобы пустить в ход двигатель, питаемый от однофазной сети, необходим пусковой резистор, соединяемый последовательно с дополнительной намоткой. Тогда сдвиг фаз составляет 30 градусов. Этого хватает для разгона. Ниже представлена схема, согласно которой достигается омический сдвиг фаз.
Вместо резистора можно применить дополнительную обмотку высокого сопротивления, но низкой индуктивности. В этом случае намотка имеет мало витков, которые выполняются из провода меньшего сечения в отличие от того, что используется для рабочей намотки.
В России с конвейера выходят моторы, подключаемые к однофазной сети, оснащенные резистором для сдвига фаз. Их мощность варьируется в диапазоне 18-600 Вт. Двигатели рассчитаны для сетей с напряжением 127, 220 или 380 Вольт и переменным током с частотой 50 Гц.
Асинхронный запуск
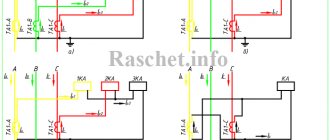
Наиболее распространенным способом пуска является метод с использованием пусковых короткозамкнутых (демпферных) электроповодников, расположенных в пазах полюсных элементов. Электрообмотки выполнены в виде латунных или металлических стержней, которые с двух сторон замыкают медными кольцами (на рисунке позиция «б»).
При пуске обмотку возбуждения (ОВ) замыкают на резистор, а цепь статора подключают к сети электропитания (поз. «а»). Вращающееся поле статорного устройства индуцирует в стержнях ЭДС, вследствие чего в них возникают токи. При их взаимодействии с магнитным потоком статора на каждый стержень действует электромагнитная сила Fэм, вызывающая вращение.
После достижения предсинхронной скорости, ОВ подключается к источнику постоянного питания. Образующийся момент разгоняет ротор электродвигателя до синхронизма. В это время в пусковой цепи больше не наводится ЭДС, поэтому асинхронный момент равен нулю. Затем демпферная КЗ-электрообмотка осуществляет лишь успокоительную функцию, ограничивая возможные колебания вала.
Процесс пуска синхронного двигателя должен производиться при замкнутой ОВ на активное электросопротивление, величина которого должна быть ориентировочно в десятикратном размере больше электросопротивления возбуждающей электроцепи. При этом замыкание ОВ накоротко в период разгона нежелательно, поскольку на роторе формируется замкнутый контур, создающий асинхронный момент. При половинной предсинхронной скорости, момент превращается в тормозящий и происходит определенное торможение синхронного двигателя. Имеет место, так называемый, «провал» в моментной величине, значительно снижающий пусковые качества СД.
Существуют и другие ограничения и особенности пуска с использованием КЗ-обмоток. Это связано с возникновением на старте большого пускового тока. В связи с этим СД подключаются к сети переменного тока только при ее соответствующей мощности, выдерживающей пяти- и семикратные превышения токовых нагрузок относительно номинальных значений эл/мотора. При недостаточной мощности электросети для ограничения скачков тока включение в работу осуществляется с помощью пониженного напряжения. Такие способы пуска носят название автотрансформаторный или реакторный пуск.
Реакторы и автотрансформаторы обеспечивают принудительное снижение быстроты нарастания тока и его величины в рабочих обмотках. Реакторный пуск предусматривает установку реакторов в каждую цепь питания фазной электроцепи СД. В связи с этим токовые значения не вырастают скачкообразно и включение получается более плавным, чем прямой пуск. При разгоне электрооборудования до предсинхронных оборотов выключатель К1 выводит индуктивный компонент из электроцепи и эл/привод работает в штатном режиме.
ПРЯМОЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Основной проблемой прямого пуска становится подключение нескольких электродвигателей к маломощной подстанции или генератору.
Включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора.
Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя.
В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
Частотное включение
Частотный пуск синхронного двигателя выполняется посредством пониженного напряжения с небольшой токовой частотой. Это возможно при наличии источника питания, способного регулировать частоту под требуемые параметры. В этом случае скорость магнитного потока также будет невелика, и полюса роторного узла будут вращаться вместе с ним.
По мере того, как скорости становятся одинаковыми, стартовую частоту питающего тока постепенно увеличивают, разгоняя ротор до номинального значения. Такой способ пуска считается мягким, обеспечивающим плавный пуск. Его недостатком является необходимость в источнике питания регулируемой частоты и напряжения.
Современный частотный пуск синхронного двигателя реализуется на базе схем на полупроводниковых элементах – тиристорных преобразователях. Они снижают характер изменения напряжения, практически не меняя действующее значение. Такой способ пуска в системах автоматики обеспечивает сокращение времени на разгон, что положительно отражается на производительности автоматизированных систем, но в то же время требует более сложной схемы включения.
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Защита электродвигателя на старте
Система защиты синхронного двигателя от затянувшегося включения предназначена для снижения негативного влияния чрезмерно высокого момента, возникающего, когда СД запускается. Причина возникновения больших моментных величин состоит в недостаточном возбуждении или его отсутствии в эл/двигателе во время старта. Схема защиты предусматривает применение:
- реле нулевого тока, осуществляющего контролирование токовой нагрузки при возбуждении;
- реле времени, отсчитывающего длительность нормального старта.
Система защиты синхронного двигателя от затянувшегося включения срабатывает, когда величина тока возбуждения в эл/моторе не достигла достаточного уровня за время, соответствующее нормальному старту. В этом случае защитная система от затянувшегося пуска прерывает процесс включения, отключая питание статора. Подобная схема защиты относится к категории специальных функций электроприводов, одновременно с защитой от обрыва электрообмотки, превышения скорости, перенапряжения и др.
Конструкция электрических машин синхронного типа с постоянными магнитами
СДПМ состоит из подвижной (ротора) и неподвижной (статора) части. Исполнение ротора различается:
- По установке магнитов. Они могут размещаться на поверхности (SPMSM ) и внутри (IPMSM) вращающегося узла. Роторы со встроенными магнитами применяются в двигателях, работающих при значительной нагрузке на валу и высоких скоростях. Стоимость таких роторов существенно выше.
- По конструкции (явнополюсные и неявнополюсные роторы). Последние имеют равную индуктивность по осям горизонтальной плоскости. Роторы с явновыраженными полюсами имеют разное отношение индуктивности.
Постоянные магниты изготавливают из ферритов, сплавов редкоземельных металлов и других материалов с высокой коэрцитивной силой.
Статор синхронных электрических машин состоит из сердечника, набранного из листов электротехнической стали, и двух- или трехфазной обмотки. Различают статоры с распределенной и сосредоточенной обмоткой. Первая имеет различное положения витков в магнитном поле. Витки в сосредоточенных обмотках имеют одинаковое положение.
Трапециидальное управление
Такая схема применяется для вентильных двигателей. Конструкция таких машин ничем не отличаются от СДПМ. Главная их особенность – принцип питания. На обмотки статора ВД подается трапециевидное напряжение. Переключение по фазам осуществляется в зависимости от угла поворота ротора.
Схемы управления ВД также бывают с датчиком и без них. В качестве устройства, обеспечивающего обратную связь, обычно используются датчики Холла. Чем больше их количество, тем точнее определяется угол поворота. Например, 3 датчика Холла позволяют определить положение ротора с точностью ±300. Бездатчиковые системы управления определяют положения по заранее известным функциям. Такие схемы применяются для решения несложных задач.
Управление синхронным двигателем с постоянными магнитами
Управление синхронными машинами осуществляется при помощи частотных преобразователей и сервоконтроллеров. Существует насколько принципов управления СДПМ. Выбор схемы осуществляется исходя из требований к электроприводу и экономической целесообразности. Наиболее распространенные схемы реализации управления синхронным электроприводом:
Скалярное
Такая схема отличатся простотой и дешевизной. При низких скоростях вращения и переменной нагрузке на валу, такой метод не подходит. При превышении нагрузки предельного момента силы на валу, электрическая машина выходит из синхронного режима и становится неуправляемой.
Векторное
Векторное управление синхронным двигателем с постоянными магнитами реализуется 3 способами:
- Полеориентированное управление с датчиком положения. Первая схема позволяет осуществлять плавное регулирование частоты вращения и момента на валу, а также задавать точное положение ротора. В качестве датчиков применяются оптические, магнитные и магниторезистивные устройства, синусно-косинусные вращающиеся трансформаторы, индуктивные энкодеры и другие устройства. Такие схемы требуют наличия контроллеров и точной настройки. Их стоимость достаточно высока. Применять схемы векторного управления имеет смысл только в претенциозных электроприводах высокоточных станков, дозаторов и т.д.
- Полеориентированное управление синхронными машинами без датчика обратной связи. Принцип определения угла поворота ротора при таком методе основан на генерации электродвигателем противо ЭДС при вращении. Вычисление ее величины позволяет определить положение ротора в стационарной системе координат. Управление без датчика не подходит при невысоких скоростях вращения, так как величина обратной ЭДС слишком мала и не превышает уровень обычных электромагнитных шумов. Кроме того, при неподвижном роторе противо ЭДС не генерируется вовсе. Схема без датчика позволяет изменять характеристики электропривода СДПМ с явнополюсным ротором. При использовании синхронных машин другого типа диапазон регулировки сильно снижается. Для этой схемы необходим процессорный управляющий блок.
- Прямое управление моментом. Такая схема обеспечивает хорошие динамические характеристики электропривода и широкий диапазон регулировки. Ограничивают ее применение значительная погрешность определения положения ротора и высокие пульсации тока статора и момента на валу. Кроме того, прямое управление создает высокую вычислительную нагрузку, для таких схем требуется мощное процессорное устройство.