Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами.
В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.
Автоматическое регулирование
Рекомендуем обратить внимание и на другие приборы для регулирования технологических процессов.
После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру.
На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную.
Технологические процессы и переменные процесса
Для нормального выполнения технологических процессов необходимо контролировать физические условия их протекания. Такие физические параметры, как температура, давление, уровень и расход могут изменяться по многим причинам, и их изменения влияют на технологический процесс. Эти изменяемые физические условия называются «переменными процесса».
Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса.
На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования.
На тепловой электростанции, работающей на угле, уголь размалывается и затем сжигается, чтобы произвести тепло, необходимое для преобразования воды в пар. Пар может использоваться по множеству назначений: для работы паровых турбин, тепловой обработки или сушки сырых материалов. Ряд операций, которые эти материалы и вещества проходят, называется «технологическим процессом». Слово «процесс» также часто используется по отношению к индивидуальным операциям. Например, операция по размолу угля или превращения воды в пар могла бы называться процессом.
Экспериментальные методы настройки регулятора
Для значительного числа промышленных объектов управления отсутствуют достаточно точные математические модели, описывающие их статические и динамические характеристики. В то ж время проведение экспериментов по снятию этих характеристик весьма дорого и трудоемко.
Экспериментальный метод настройки регуляторов не требуют знания математической модели объекта. Однако предполагается, что система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятора. Таким образом, можно проводить некоторые эксперименты по анализу влияния изменения настроек на динамику системы. В конечном итоге гарантируется получение хороших настроек для данной системы регулирования.
Существуют два метода настройки — метод незатухающих колебаний и метод затухающих колебаний.
Метод незатухающих колебаний
В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (T i = Ґ,T d =0), то есть система переводится в закон регулирования П.
Путем последовательного увеличения K p с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом T kp . Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора K kp и периода критических колебаний в системе T kp . При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения.
По значениям T kp и K kp рассчитываются параметры настройки регулятора:
- П-регулятор: K p =0,55 K kp ;
- ПИ-регулятор: K p =0,45 K kp ; T i =T kp /1,2;
- ПИД-регулятор: K p =0,6 K kp ; T i =T kp /2; T d =T kp /8.
Расчет настроек регулятора можно производить по критической частоте собственно объекта управления w п . Учитывая, что собственная частота Ґ п ОУ совпадает с критической частотой колебаний замкнутой системы с П-регулятором, величины T kp и K kp могут быть определены по амплитуд и периоду критических колебаний собственно объекта управления.
При выведении замкнутой системы на границу колебательной устойчивости, амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на объекте или к выпуску бракованной продукции. Поэтому не все системы управления промышленными объектами могут выводиться на критический режим работы.
Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Так же, как и в предыдущем методе, для замкнутой системы с П-регулятором путем последовательного увеличения KP добиваются переходного процесса отработки прямоугольного импульса по сигналу задания или возмущения с декрементом затухания D=1/4. Далее определяется период этих колебаний T k и значения постоянных интегрирования и дифференцирования регуляторов T i ,T d .
- Для ПИ-регулятора:T i =T k /6;
- Для ПИД-регулятора:T i =T k /6;T d =T k /1,5.
После установки вычисленных значений T i и T d на регуляторе необходимо экспериментально уточнить величину K P для получения декремента затухания D=1/4. С этой целью производится дополнительная подстройка K P для выбранного закона регулирования, что обычно приводит к уменьшению K P на 20 –30%. Большинство промышленных систем регулирования считаются качественно настроенными, если их декремент затухания D равен 1/4 или 1/5.
Принцип работы и элементы системы автоматического регулирования
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
Элементы системы автоматического регулирования
Первичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
Схема простой системы автоматического регулирования
1.3. Основные законы управления
Если вернуться к последнему рисунку (структурная схема САУ на рис. 1.2.3), то необходимо “расшифровать” роль, которую играет усилительно-преобразующее устройство (какие функции оно выполняет).
Если усилительно-преобразующее устройство (УПУ) выполняет только усиление (или ослабление) сигнала рассогласования ε(t), а именно: , где – коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
Если УПУ выполняет формирование выходного сигнала ε1(t), пропорционального ошибке ε(t) и интегралу от ε(t), т.е. , то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==> , где b
– коэффициент пропорциональности (в частном случае
b = Const
).
Обычно ПИ-управление используется для повышения точности управления (регулирования).
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t) и ее производной, то такой режим называется пропорционально-дифференцирующим (ПД-управление): ==>
Обычно использование ПД-управления повышает быстродействие САУ
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t), ее производной, и интегралу от ошибки ==> , то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
ПИД-управление позволяет зачастую обеспечить “хорошую” точность управления при “хорошем” быстродействии
Виды систем автоматического регулирования
Имеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
Замкнутая система автоматического регулирования
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
Схема замкнутой системы автоматического регулирования
Например, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
Разомкнутая система автоматического регулирования
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
Схема разомкнутой системы автоматического регулирования
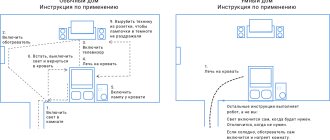
Один из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Выбор канала регулирования
Одним и тем ж выходным параметром объекта можно управлять по разным входным каналам.
При выборе нужного канала управления исходят из следующих соображений:
- Из всех возможных регулирующих воздействий выбирают такой поток вещества или энергии, подаваемый в объект или отводимый из него, минимальное изменение которого вызывает максимальное изменение регулируемой величины, то есть коэффициент усиления по выбранному каналу должен быть, по возможности, максимальным. Тогда, по данному каналу можно обеспечить наиболее точное регулирование.
- Диапазон допустимого изменения управляющего сигнала должен быть достаточен для полной компенсации максимально возможных возмущений, возникающих в данном процессе, то есть должен быть обеспечен запас по мощности управления в данном канале.
- Выбранный канал должен иметь благоприятные динамические свойства, то есть запаздывание t 0 и отношение t 0 /T 0 , где T 0 — постоянная времени объекта, должны быть как можно меньшими. Кроме того, изменение статических и динамических параметров объекта по выбранному каналу при изменении нагрузки или во времени должны быть незначительными.
Методы автоматического регулирования
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
Система ручного регулирования с обратной связью
Основным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование с воздействием по возмущению
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Выбор типа регулятора
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надёжности обеспечивал бы заданное качество регулирования.
Для того чтобы выбрать тип регулятора и определить его настройки, необходимо знать:
- Статические и динамические характеристики объекта управления.
- Требования к качеству процесса регулирования.
- Показатели качества регулирования для серийных регуляторов.
- Характер возмущений,действующих на процесс регулирования.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами.
Рассмотрим показатели качества серийных регуляторов. В качестве серийных предполагаются непрерывные регуляторы, реализующие законы управления И, П, ПИ и ПИД.
Теоретически, с усложнением закона регулирования качество работы системы улучшается. Известно, что на динамику регулирования наибольшее влияние оказывает величина отношения запаздывания к постоянной времени объекта с . Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования R d , а быстродействие — величиной времени регулирования. Теоретически, в системе с запаздыванием минимальное время регулирования t pvin =2/.
Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 1.
Таблица 1
| Закон регулирования | П | ПИ | ПИД |
| t p / t ,где t p – время регулирования, t –запаздывание в объекте | 6,5 | 12 | 7 |
Руководствуясь таблицей, можно утверждать, что наибольшее быстродействие обеспечивает закон управления П. Однако, если коэффициент усиления П-регулятора KP мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, так как в этом случае велика величина статической ошибки. Если KP имеет величину равную 10 и более, то П-регулятор приемлем, а если KP<10 то требуется введение в закон управления интегральной составляющей.
Наиболее распространенным на практик является ПИ-регулятор, который обладает следующими достоинствами:
- Обеспечивает нулевую статическую ошибку регулирования.
- Достаточно прост в настройке, так как настраиваются только два параметра, а именно коэффициент усиления K P и постоянная интегрирования T i . В таком регуляторе имеется возможность оптимизации K p /T i >max, что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования.
- Обладает малой чувствительностью к шумам в канале измерения (в отличие от ПИД-регулятора).
Для наиболее ответственных контуров можно рекомендовать использование ПИД-регулятора, обеспечивающего наиболее высокое быстродействие в системе. Однако следует учитывать, что это условие выполняется только при его оптимальных настройках (настраиваются три параметра). С увеличением запаздывания в системе резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия дифференциальной составляющей регулятора. Поэтому качество работы ПИД-регулятора для систем с большим запаздыванием становится сравнимо с качеством работы ПИ-регулятора. Кроме этого, наличие шумов в канале измерения в системе с ПИД-регулятором приводит к значительным случайным колебаниям управляющего сигнала регулятора,что увеличивает дисперсию ошибки регулирования. Таким образом, ПИД-регулятор следует выбирать для систем регулирования с относительно малым уровнем шумов и величиной запаздывания в объекте управления. Примерами таких систем являются системы регулирования температуры.
При выборе типа регулятора рекомендуется ориентироваться на величину отношения запаздывания к постоянной времени в объекте t/T. Если t/T< 0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы. Если 0,2 < t/T< 1, то должен быть выбран непрерывный или цифровой, ПИ или ПИД-регулятор. Если t /T >1, то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот ж регулятор рекомендуется применять и при меньших отношениях t /T.
Одноконтурные и многоконтурные системы регулирования
Одноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
Одноконтурная система регулирования
Некоторые системы регулирования имеют два или больше первичных элемента и обрабатывают больше, чем один входной сигнал на регулятор. Эти системы автоматического регулирования называются «многоконтурными» системами регулирования.
Многоконтурная система регулирования
Классиффикация регуляторов
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электронные, пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы.
По закону регулирования они делятся на двух-и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально- интегральные и пропорционально- интегрально- дифференциальные регуляторы — сокращенно И, П, ПД, ПИ и ПИД-регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение благодаря своей простоте и малой стоимости.
По виду выполняемых функций регуляторы подразделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Регулирование при наличии шумов
Наличие высокочастотных шумовых составляющих в измерительном сигнале приводит к случайным колебаниям исполнительного механизма системы, что увеличивает дисперсию ошибки регулирования и снижает точность регулирования. В некоторых случаях сильные шумовые составляющие могут привести систему к неустойчивому режиму работы (стохастическая неустойчивость).
В промышленных системах в измерительных цепях часто присутствуют шумы, связанные с частотой питающей сети. В связи с этим важной задачей является правильная фильтрация измерительного сигнала, а также выбор нужного алгоритма и параметров работы регулятора. Для этого используются фильтры низкой частоты высокого порядка (5 –7), имеющие большую крутизну спада. Их иногда встраивают в нормирующие преобразователи.
Таким образом, главной задачей регулятора является компенсация низкочастотных возмущений. При этом, с целью получения минимальной дисперсии ошибки регулирования, высокочастотные помехи должны быть отфильтрованы. Однако, в общем случае, эта задача противоречивая, так как спектры возмущения и шума могут накладываться друг на друга. Это противоречие разрешается с помощью теории оптимального стохастического управления, которая позволяет добиться хорошего быстрод йствия в системе при минимально возможной дисперсии ошибки регулирования. Для уменьшения влияния помех в практических ситуациях применяются два способа, основанных на:
- уменьшении коэффициента усиления регулятора K p , то есть, фактически, переход на интегральный закон регулирования, который малочувствителен к шумам;
- фильтрации измеряемого сигнала.