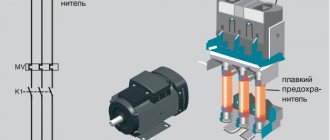
Типы электродвигателей По виду питающего тока Синхронные электродвигатели Асинхронные электродвигатели Вентильные электродвигатели Расчет мощности Расчет пускового тока Режимы работы Климатическое исполнение Энергоэффективность
Электродвигатель – механизм, преобразующий энергию электрического тока в кинетическую энергию. Современное производство и быт сложно представить без машин с электроприводом. Они используются в насосном оборудовании, системах вентиляции и кондиционирования, в электротранспорте, промышленных станках различных типов и т.д.
При выборе электродвигателя необходимо руководствоваться несколькими основными критериями:
- вид электрического тока, питающего оборудование;
- мощность электродвигателя;
- режим работы;
- климатические условия и другие внешние факторы.
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.
Главный недостаток электродвигателей постоянного тока – возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
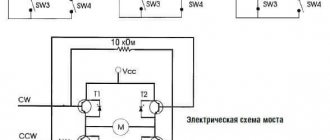
Как работает контроллер электровелосипеда
Распиновка для контроллера электровелосипеда
Под термином «контроллер» понимается электронное приспособление, выполняющее посредническую роль между рулевым управлением и двигателем. По сути он осуществляет преобразование постоянных батарейных токов в трехфазные, актуальные для мотор-колеса. Обычно этот механизм помещается в герметичный металлический корпус, который защищает его от нежелательных внешних воздействий.Именно с помощью контроллера становится возможной передача электротоков к элементам системы и, собственно, активация мотор-колеса с последующим контролем работы данного элемента.
- Сначала контроллер принимает сигнал, поступающий с ручки акселератора.
- Затем он активирует двигатель, раскручивая его.
- При изменении сигнала устройство регулирует скорость вращения электромотора велосипеда, главным образом посредством изменения длины импульсов.
- Параллельно контроллер фиксирует уровень напряжения в батареях и может отключать двигатель от питания для его защиты и продления срока службы.
- Дополнительно изделие способно преобразовывать переменный ток в постоянный для обеспечения торможения.
Режимов работы у изделия может быть два: работа от двигателя «power-on-demand» и «pedal-assist» или поддержка педалирования. Во втором режиме устройство все время контролирует силу и скорость вращения педалей, чтобы соответствующим образом регулировать работу электромотора велосипеда. Обычно штатные контроллеры, которыми комплектуются электробайки, демонстрирую напряжение либо 36 Вольт, либо 48 Вольт.
Синхронные электродвигатели
Синхронные двигатели – оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
На что следует обращать внимание при выборе устройства?
Если вам требуется произвести выбор электродвигателя для производства, либо для применения в другой сфере, следует обратить внимание на такие факторы:
- способ питания;
- вид электрического тока;
- режим эксплуатации;
- воздействие внешней среды на оборудование.
Современная модель электродвигателя, должна функционировать от сети с частотой от 50 до 60 Гц, чтобы обеспечить её использование в любой точке мира. Двигатель должен демонстрировать высокий показатель КПД и отвечать всем международным нормам.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок – до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
Производители электродвигателей на велосипед
На рынке существует множество производителей данных устройств, и основная доля компаний, выпускающих вело-моторы, расположена в Китае.
Bafang
Компания производит электрические моторы широкого применения, и в том числе велосипедные. Электродвигатели для велосипедов фирма выпускает в виде моторов-колёс, устанавливающихся на любой байк. Популярен комплект Bafang BBS02. Моторы представлены в разных мощностях – 250-750 Вт. Данные наборы укомплектованы устройствами привода, ручкой пуска, тормозами и другими составляющими. Весит такой мотор около 4 кг, а наибольшую скорость с данным агрегатом можно развить до 50 км/ч.
MXUS
MXUS является суббрендом Huayu Xinfeng и производит мотор-колеса и комплектующие для електробайков уже более 20 лет. Помимо производства и продажи моторов и комплектов для преобразования электронных велосипедов, MXUS также планирует производить элктро-колеса на различные самокаты, скутеры и интеллектуальные электронные велосипеды, чтобы удовлетворить больше требований клиентов.
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
Редукторные электромоторы
Электродвигатель расположен внутри ступицы колеса, там же расположена зубчатая понижающая планетарная передача, которая даёт электродвигателю вращаться с большими оборотами, чем обод колеса.
Шестерёнки обычно из пластмассы.
Есть механизм передающий момент в системе колесо-мотор только в одном направлении — при тяге от двигателя (фривил, обгонная муфта).
В случае, когда передача идёт в обратном направлении, происходит разьеденение системы, таким образом при накате, либо движении от педалей, электромотор не вращается, и тем самым не затрудняет вращение колеса.
Достоинства редукторного двигателя:
- Лучшее кпд в широком диапазоне скоростей относительно директдрайва, лучшая тяга на малых скоростях и старте, меньший расход энергии на километр пробега, меньшие размеры и вес, отсутсвие сопротивления движению при езде от педалей.
Недостатки редукторного двигателя:
- отсутствие возможности использовать рекуперацию, слабое место в виде пластиковых шестеренок, при срезании зубьев каковой, либо порче обгонной муфты в пути, добираться придётся педалируя.
Мощность электродвигателя
В режиме постоянной или незначительно изменяющейся нагрузки работает большое количество механизмов: вентиляторы, компрессоры, насосы, другая техника. При выборе электродвигателя необходимо ориентироваться на потребляемую оборудованием мощность.
Определить мощность можно расчетным путем, используя формулы и коэффициенты, приведенные ниже.
Мощность на валу электродвигателя определяется по следующей формуле:
где: Рм – потребляемая механизмом мощность; ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Формула расчета мощности электродвигателя для насоса
где: K3 – коэффициента запаса, он равен 1,1-1,3; g –ускорение свободного падения; Q – производительность насоса; H – высота подъема (расчетная); Y – плотность перекачиваемой насосом жидкости; ηнас – КПД насоса; ηп – КПД передачи.
Давление насоса рассчитывается по формуле:
Формула расчета мощности электродвигателя для компрессора
Мощность поршневого компрессора легко рассчитать по следующей формуле:
где: Q – производительность компрессора; ηk – индикаторный КПД поршневого компрессора (0,6-0,8); ηп – КПД передачи (0,9-0,95); K3 – коэффициент запаса (1,05 -1,15).
Значение A можно рассчитать по формуле:
или взять из таблицы
| p2, 105Па | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| A, 10-3 Дж/м³ | 132 | 164 | 190 | 213 | 230 | 245 | 260 | 272 |
Формула расчета мощности электродвигателя для вентиляторов
где: K3 – коэффициент запаса. Его значения зависят от мощности двигателя:
- до 1 кВт – коэффициент 2;
- от 1 до 2 кВт – коэффициент 1,5;
- 5 и более кВт – коэффициент 1,1-1,2.
Q – производительность вентилятора; H – давление на выходе; ηв – КПД вентилятора; ηп – КПД передачи.
Приведенная формула используется для расчета мощности осевых и центробежных вентиляторов. КПД центробежных моделей равен 0,4-0,7, а осевых вентиляторов – 0,5-0,85.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов.
ВАЖНО! При выборе электродвигателя запас мощности должен быть, но небольшой. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Пусковой ток электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток.
Номинальный ток электродвигателей постоянного тока
Номинальный ток трехфазных электродвигателей переменного тока
где: PH – номинальная мощность электродвигателя; UH — номинальное напряжение электродвигателя, ηH — КПД электродвигателя; cosfH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя.
Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей
где: IH – номинальное значение тока; Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Режимы работы электродвигателей
Режим работы определяет нагрузку на электродвигатель. В некоторых случаях она остается практически неизменной, в других может изменяться. Характер предполагаемой нагрузки обязательно учитывается при выборе двигателя. Действующими стандартами предусмотрены следующие режимы эксплуатации:
Режим S1 (продолжительный). При таком режиме эксплуатации нагрузка остается постоянной в течение всего времени, пока температура электродвигателя не достигнет необходимого значения. Мощность привода рассчитывается по формулам, приведенным выше.
Режим S2 (кратковременный). При эксплуатации в этом режиме температура двигателя в период его включения не достигает установившегося значения. За время отключения электродвигатель охлаждается до температуры окружающей среды. При кратковременном режиме эксплуатации необходимо проверять перегрузочную способность электропривода.
Режим S3 (периодически-кратковременный). Электродвигатель работает с периодическими отключениями. В периоды включения и отключения его температура не успевает достигнуть заданного значения или охладиться до температуры окружающей среды. При расчете мощности двигателя обязательно учитывается продолжительность пауз и потерь в переходные периоды. При выборе электродвигателя важным параметром является допустимое количество включений за единицу времени.
Режимы S4 (периодически-кратковременный, с частыми пусками) и S5 (периодически-кратковременный с электрическим торможением). В обоих случаях работа двигателя рассматривается по тем же параметрам, что и в режиме эксплуатации S3.
Режим S6 (периодически-непрерывный с кратковременной нагрузкой). Работа электродвигателя в данном режиме предусматривает эксплуатацию под нагрузкой, чередующуюся с холостым ходом.
Режим S7 (периодически-непрерывный с электрическим торможением)
Режим S8 (периодически-непрерывный с одновременным изменением нагрузки и частоты вращения)
Режим S9 (режим с непериодическим изменением нагрузки и частоты вращения)
Большинство моделей современных электроприводов, эксплуатируемых продолжительное время, адаптированы к изменяющемуся уровню нагрузки.
Типы электрических двигателей
Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
- Вентилятор
где Q [м3/с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
kз – коэффициент запаса.
- Насос
где Q [м3/с] – производительность насоса,
g=9,8 м/с2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м3] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
kз – коэффициент запаса.
- Поршневой компрессор
где Q [м3/с] – производительность компрессора,
А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления,
ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно,
kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением
Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)
для двигателей переменного тока
при этом потребляемые активная и реактивная мощности соответственно
В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
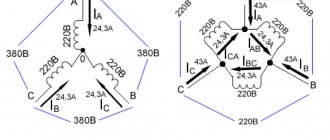
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
- Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Климатические исполнения электродвигателей
При выборе электродвигателя учитываются не только его технические характеристики, но и условия окружающей среды, в которых он будет эксплуатироваться.
Современные электроприводы выпускаются в разных климатических исполнениях. Категории маркируются соответствующими буквами и цифрами:
- У – модели для эксплуатации в умеренном климате;
- ХЛ – электродвигатели, адаптированные к холодному климату;
- ТС – исполнения для сухого тропического климата;
- ТВ – исполнения для влажного тропического климата;
- Т – универсальные исполнения для тропического климата;
- О – электродвигатели для эксплуатации на суше;
- М – двигатели для работы в морском климате (холодном и умеренном);
- В – модели, которые могут использоваться в любых зонах на суше и на море.
Цифры в номенклатуре модели указывают на тип ее размещения:
- 1 – возможность эксплуатации на открытых площадках;
- 2 – установка в помещениях со свободным доступом воздуха;
- 3 – эксплуатация в закрытых цехах и помещениях;
- 4 – использование в производственных и других помещениях с возможностью регулирования климатических условий (наличие вентиляции, отопления);
- 5 – исполнения, разработанные для эксплуатации в зонах повышенной влажности, с высоким образованием конденсата.
Преимущества и недостатки наборов для электровелосипеда
У электрокомплекта на заднее либо переднее колесо есть ряд преимуществ и недостатков.
Среди плюсов отмечают:
- велосипед, на котором установлен электропривод, имеет более высокую максимальную и начальную скорость;
- весь механизм более надежный, некоторые детали имеют длительный срок износа;
- возможность установки велокомпьютера, для наблюдения статистических данных и скорости движения;
- универсальное средство передвижения на работу, в магазин или домой без усилий или особых денежных затрат;
- без превышения мощности двигателя в 250Вт на этот электровелосипед не требуются какие-либо документы.
Из недостатков можно выделить:
- большой вес, сравнительно обычного велосипеда (ведь при апгрейда общий вес повышается примерно на 6 килограмм);
- сравнительно недешевая установка всего механизма (стоимость электромотора и хорошего аккумулятора может превышать 600 долларов);
- возникает постоянная необходимость в заряде велосипеда, тем самым уменьшается автономность его использования в любых условиях;
- температура ниже 0 или выше 35 градусов значительно уменьшают срок пригодности составных электронабора;
- повреждение или падение такого велосипеда может вылиться в большие денежные затраты;
- при поездках в дождь или густой туман стоит подумать о полной герметизации всего механизма;
- батарея – это всё-таки расходник, потому примерно через 5 лет необходимо купить новый аккумулятор;
- поскольку такой велосипед после установки электрокомплекта становится куда дороже, нужно обеспечить его хорошей противоугонной защитой.
Энергоэффективность
Рациональное потребление энергии при сохраняющейся высокой мощности сокращает текущие производственные затраты при одновременном увеличении производительности электродвигателя. Поэтому при выборе привода обязательно учитывается класс энергоэффективности.
В технической документации и каталогах обязательно указывается класс энергоэффективности двигателя. Он зависит от показателя КПД.
Проводимые в тестовом и рабочем режимах экспериментальные исследования показывают, что электродвигатель мощностью 55 кВт высокого класса энергоэффективности сокращает потребление электроэнергии на 8-10 тысяч кВт ежегодно.
Другие полезные материалы:
Редуктор от «А» до «Я» Как выбрать мотор-редуктор Выбор преобразователя частоты Подключение и настройка частотного преобразователя