Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.
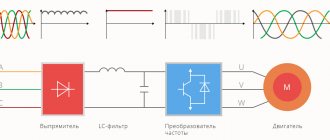
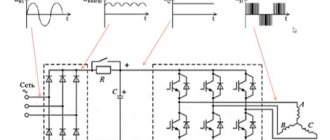
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
Способ управления U/F с энкодером
Если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/F.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/F минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/F. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.
В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
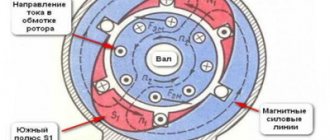
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
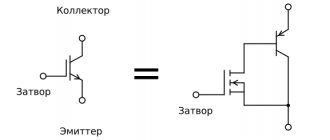
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. Транзисторы с изолированным затвором (IGBT) путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.
В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Настройка частотного преобразователя для электродвигателя
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».
Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Основные критерии выбора
При выборе частотного преобразователя и проектировании электропривода с частотной регулировкой следует обращать внимание на следующие факторы:
- Назначение. На современном электротехническом рынке сейчас предлагаются модели, рассчитанные на работу лифтового, насосного оборудования и систем вентиляции, а также универсального действия и общепромышленного применения. Кроме того, существуют специализированные частотники с ограниченными возможностями адаптации, разработанные для конкретных технологических устройств и процессов;
- Методика управления и поддержка разного рода протоколов связи. Современные ЧП нередко интегрируются в комплексные и дистанционно управляемые автоматизированные системы, поэтому они должны быть оборудованы микроконтроллером для обеспечения связи по одному или нескольким протоколам, совместимым с конкретно используемой АСУТП;
- Способность к перегрузкам и мощность. Рекомендуется использовать частотники с большим на 15-30 процентов номиналом, чем заявленная электрическая мощность электромотора. Также следует учитывать пиковые нагрузки и стартовые токи электроустановки, чтобы избежать перегрева и выхода из строя самого преобразователя, а также работающего под его управлением оборудования;
- Точность и диапазон регулировки. Частота должна меняться с точностью и интервалом, соответствующим требованиям отдельно взятого техпроцесса. Частотники скалярного типа позволяют выставлять значение от одного до десяти. Для более широкого диапазона применяются устройства векторного типа;
- Электромагнитная характеристика совместимости. Преобразователь частоты сам создает электромагнитные помехи и подвержен их влиянию, поэтому модель нужно подбирать в соответствии с условиями монтажа. Для этого используются различные фильтры и экранированные кабеля. Иногда частотники устанавливаются даже в отдельном помещении, защищенном от неблагоприятных условий эксплуатации самого электропривода;
- Возможность аварийного отключения силового агрегата при перегрузке, перегреве, фазовом дисбалансе и прочих ненормативных режимах функционирования;
- Наличие ситуативного автоматизированного контроля, когда синхронизация работы электрооборудования производится в соответствии с достижением определенной величины одной или нескольких технологических характеристик;
- Число входов/выходов для подсоединения различных устройств контроля и дистанционного управления. Чтобы обеспечить возможность модернизации существующей или проектируемой системы, рекомендуется выбирать преобразователи, имеющие избыточное количество дискретных и аналоговых разъемов. Также желательно, чтобы у них была интегрированная память и реализована возможность составления журнала текущих и прошедших событий;
- Номинальные параметры тока и напряжения. Они подбираются в соответствии с характеристиками имеющегося электромотора.
При выборе промышленного преобразователя частоты также используются специальные расчетные методики, позволяющие свести к минимуму вероятность ошибки. Поэтому подбор устройства управления для дорогостоящего оборудования желательно доверить специалистам. Правильно подобранный частотник также позволяет существенно экономить электроэнергию и повышает эффективность техпроцесса в целом.