Types of electric motors By type of supply current Synchronous electric motors Asynchronous electric motors Valve electric motors Power calculation Starting current calculation Operating modes Climatic version Energy efficiency
An electric motor is a mechanism that converts the energy of electric current into kinetic energy. It is difficult to imagine modern production and everyday life without electrically driven machines. They are used in pumping equipment, ventilation and air conditioning systems, electric vehicles, industrial machines of various types, etc.
When choosing an electric motor, you must be guided by several basic criteria:
- the type of electric current powering the equipment;
- electric motor power;
- operating mode;
- climatic conditions and other external factors.
DC and AC motors
Depending on the electric current used, motors are divided into two groups:
- DC drives;
- AC drives.
DC motors are not used as often today as they used to be. They have practically been replaced by asynchronous motors with squirrel-cage rotors.
The main disadvantage of DC electric motors is that they can only be operated with a DC source or an AC-to-DC converter. In modern industrial production, ensuring this condition requires additional financial costs.
However, with significant disadvantages, this type of motor is characterized by a high starting torque and stable operation under conditions of high overloads. Drives of this type are most often used in metallurgy and machine tool construction and are installed on electric vehicles.
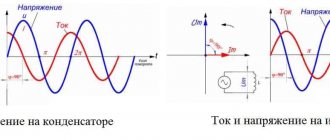
The operating principle of AC electric motors is based on electromagnetic induction that occurs during the movement of a conducting medium in a magnetic field. To create a magnetic field, windings flowing around currents or permanent magnets are used.
AC electric motors are divided into synchronous and asynchronous. Each subgroup has its own design and operational features.
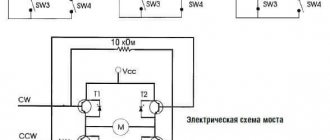
How does an electric bike controller work?
Pinout for an electric bicycle controller
The term “controller” refers to an electronic device that plays an intermediary role between the steering and the engine. Essentially, it converts direct battery currents into three-phase currents, relevant for the wheel motor. Typically, this mechanism is placed in a sealed metal case, which protects it from unwanted external influences. It is with the help of the controller that it becomes possible to transmit electric currents to the elements of the system and, in fact, activate the motor-wheel with subsequent control of the operation of this element.
- First, the controller receives the signal coming from the accelerator handle.
- He then activates the engine, spinning it up.
- When the signal changes, the device adjusts the rotation speed of the bicycle's electric motor, mainly by changing the length of the pulses.
- In parallel, the controller records the voltage level in the batteries and can disconnect the engine from power to protect it and extend its service life.
- Additionally, the product is capable of converting alternating current into direct current to provide braking.
The product can have two operating modes: operation from the engine “power-on-demand” and “pedal-assist” or pedaling support. In the second mode, the device constantly monitors the force and speed of pedaling in order to adjust the operation of the bicycle's electric motor accordingly. Typically, the standard controllers that come with electric bikes display a voltage of either 36 Volts or 48 Volts.
Synchronous electric motors
Synchronous motors are the optimal solution for equipment with constant operating speed: DC generators, compressors, pumps, etc.
The technical characteristics of synchronous electric motors of different models differ. The rotation speed ranges from 125 to 1000 rpm, the power can reach 10 thousand kW.
The design of the drives includes a short-circuited winding on the rotor. Its presence allows for asynchronous engine starting. The advantages of equipment of this type include high efficiency and small dimensions. The operation of synchronous electric motors allows you to reduce electricity losses in the network to a minimum.
What should you pay attention to when choosing a device?
If you need to select an electric motor for production or for use in another area, you should pay attention to the following factors:
- way of eating;
- type of electric current;
- operating mode;
- impact of the external environment on equipment.
A modern electric motor model must operate from the mains with a frequency of 50 to 60 Hz to ensure its use anywhere in the world. The engine must demonstrate high efficiency and meet all international standards.
Asynchronous electric motors
Asynchronous AC motors are most widely used in industrial production. A feature of these drives is a higher frequency of rotation of the magnetic field compared to the speed of rotation of the rotor.
Modern engines use aluminum to make the rotor. The light weight of this material makes it possible to reduce the weight of the electric motor and reduce the cost of its production.
The efficiency of an asynchronous motor drops almost by half when operating at low loads - up to 30-50 percent of the nominal value. Another disadvantage of such electric drives is that the starting current parameters are almost three times higher than the operating parameters. To reduce the starting current of an asynchronous motor, frequency converters or soft starters are used.
Asynchronous motors meet the requirements of various industrial applications:
- For elevators and other equipment requiring stepwise speed changes, multi-speed asynchronous drives are produced.
- When operating winches and metalworking machines, electric motors with an electromagnetic braking system are used. This is due to the need to stop the drive and fix the shaft in case of power outages or disappearance.
- In processes with a pulsating load or in intermittent modes, asynchronous electric motors with increased sliding parameters can be used.
Manufacturers of electric motors for bicycles
There are many manufacturers of these devices on the market, and the majority of companies producing bicycle motors are located in China.
Bafang
The company produces electric motors for a wide range of applications, including bicycle motors. The company produces electric motors for bicycles in the form of wheel motors that are installed on any bike. The Bafang BBS02 kit is popular. Motors are available in different powers - 250-750 W. These kits are equipped with drive devices, start handle, brakes and other components. This motor weighs about 4 kg, and the highest speed with this unit can be reached up to 50 km/h.
MXUS
MXUS is a sub-brand of Huayu Xinfeng and has been producing motor wheels and components for electric bikes for more than 20 years. In addition to producing and selling e-bike motors and conversion kits, MXUS also plans to produce e-wheels for various scooters, scooters and smart e-bikes to meet more customer demands.
Valve motors
The group of valve electric motors includes drives in which the operating mode is controlled by means of valve converters.
The advantages of this equipment include:
- High service life.
- Easy maintenance due to contactless control.
- High overload capacity, which is five times the starting torque.
- Wide speed control range, which is almost twice the range of asynchronous electric motors.
- High efficiency at any load - more than 90 percent.
- Small dimensions.
- Fast payback.
Geared electric motors
The electric motor is located inside the wheel hub, and there is also a gear reduction planetary gear, which allows the electric motor to rotate at higher speeds than the wheel rim.
Gears are usually made of plastic.
There is a mechanism that transmits torque in the wheel-motor system in only one direction - with traction from the engine (freewheel, overrunning clutch).
In the case when the transmission goes in the opposite direction, the system is disconnected, so when coasting or moving from the pedals, the electric motor does not rotate, and thus does not impede the rotation of the wheel.
Advantages of a gear motor:
- Better efficiency in a wide range of speeds relative to direct drive, better traction at low speeds and starting, lower energy consumption per kilometer, smaller size and weight, lack of resistance to movement when driving from the pedals.
Disadvantages of a gear motor:
- the inability to use recovery, a weak point in the form of plastic gears, if the teeth of which are cut off, or the overrunning clutch is damaged along the way, you will have to pedal to get there.
Motor power
A large number of mechanisms operate in constant or slightly varying load mode: fans, compressors, pumps, and other equipment. When choosing an electric motor, you need to focus on the power consumed by the equipment.
Power can be determined by calculation using the formulas and coefficients given below.
The power on the electric motor shaft is determined by the following formula:
where: Рм – power consumed by the mechanism; ηп – transmission efficiency.
It is advisable to choose the rated power of the electric motor greater than the calculated value.
Formula for calculating electric motor power for a pump
where: K3 – safety factor, it is equal to 1.1-1.3; g – free fall acceleration; Q – pump performance; H – lifting height (calculated); Y – density of the liquid pumped by the pump; ηus – pump efficiency; ηп – transmission efficiency.
Pump pressure is calculated using the formula:
Formula for calculating electric motor power for a compressor
The power of a piston compressor can be easily calculated using the following formula:
where: Q – compressor performance; ηk – indicator efficiency of a piston compressor (0.6-0.8); ηп – transmission efficiency (0.9-0.95); K3 – safety factor (1.05 -1.15).
The value of A can be calculated using the formula:
or take it from the table
| p2, 105Pa | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| A, 10-3 J/m³ | 132 | 164 | 190 | 213 | 230 | 245 | 260 | 272 |
Formula for calculating motor power for fans
where: K3 – safety factor. Its values depend on engine power:
- up to 1 kW – coefficient 2;
- from 1 to 2 kW – coefficient 1.5;
- 5 kW or more – coefficient 1.1-1.2.
Q – fan performance; H – outlet pressure; ηv – fan efficiency; ηп – transmission efficiency.
The given formula is used to calculate the power of axial and centrifugal fans. The efficiency of centrifugal models is 0.4-0.7, and that of axial fans is 0.5-0.85.
The remaining technical characteristics necessary to calculate engine power can be found in the catalogs for each type of mechanism.
IMPORTANT! When choosing an electric motor, there should be a power reserve, but it should be small. With a significant power reserve, the drive efficiency decreases. In AC motors, this also leads to a decrease in power factor.
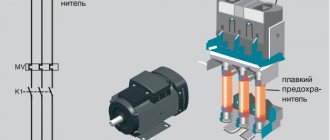
Motor starting current
Knowing the type and rated power of the electric motor, you can calculate the rated current.
Rated current of DC motors
Rated current of three-phase AC motors
where: PH – rated power of the electric motor; UH is the rated voltage of the electric motor, ηH is the efficiency of the electric motor; cosfH is the power factor of the electric motor.
Rated power, voltage and efficiency values can be found in the technical documentation for a specific electric motor model.
Knowing the value of the rated current, you can calculate the starting current.
Formula for calculating the starting current of electric motors
where: IH – rated current value; Кп – direct current multiple to the rated value.
The starting current must be calculated for each motor in the circuit. Knowing this value, it is easier to select the type of circuit breaker to protect the entire circuit.
Operating modes of electric motors
The operating mode determines the load on the electric motor. In some cases it remains virtually unchanged, in others it may change. The nature of the expected load must be taken into account when choosing an engine. Current standards provide for the following operating modes:
Mode S1 (long-term). In this operating mode, the load remains constant for the entire time until the temperature of the electric motor reaches the required value. Drive power is calculated using the formulas given above.
Mode S2 (short-term). When operating in this mode, the engine temperature during its switching on does not reach the steady-state value. During shutdown, the electric motor cools down to ambient temperature. During short-term operation, it is necessary to check the overload capacity of the electric drive.
Mode S3 (periodically-short-term). The electric motor operates with periodic shutdowns. During periods of switching on and off, its temperature does not have time to reach the set value or cool down to the ambient temperature. When calculating engine power, the duration of pauses and losses during transition periods must be taken into account. When choosing an electric motor, an important parameter is the permissible number of starts per unit of time.
Modes S4 (periodically short-term, with frequent starts) and S5 (periodically short-term with electric braking). In both cases, the engine operation is considered according to the same parameters as in operating mode S3.
Mode S6 (periodically-continuous with short-term load). Operation of the electric motor in this mode involves operation under load, alternating with idling.
Mode S7 (intermittent-continuous with electric braking)
Mode S8 (periodically-continuous with simultaneous change in load and rotation speed)
Mode S9 (mode with non-periodic changes in load and rotation speed)
Most models of modern electric drives, which have been in operation for a long time, are adapted to changing load levels.
Types of Electric Motors
DC motors
The main advantage of these engines, which determined their widespread use at the stage of development of electric drives, is the ease of smooth speed control over a wide range. Therefore, with the development of the semiconductor industry and the advent of relatively inexpensive frequency converters, the percentage of their use is constantly decreasing. Where possible, DC motors are being replaced by drives based on squirrel-cage asynchronous motors.
The main disadvantages of a DC motor (low reliability, complexity of maintenance and operation) are due to the presence of a collector unit. In addition, to power the motor, a DC source or a thyristor AC-to-DC converter is required. Despite all their shortcomings, DC motors have a high starting torque and a large overload capacity. What determined their use in the metallurgical industry, machine tool industry and electric transport.
Synchronous motors
The main advantage of these motors is that they can operate with a power factor of cosφ=1, and in overexcitation mode they can even supply reactive power to the network, which has a beneficial effect on the characteristics of the network: its power factor increases, losses and voltage drop are reduced. In addition, synchronous motors are resistant to network fluctuations. The maximum torque of a synchronous motor is proportional to the voltage, while the torque of an asynchronous motor is proportional to the square of the voltage. Consequently, when the voltage decreases, the synchronous motor retains a greater overload capacity, and the ability to force excitation increases the reliability of their operation during emergency voltage drops. The larger air gap compared to an asynchronous motor and the use of permanent magnets make the efficiency of synchronous motors higher. Their feature is also the constancy of the rotation speed when the load torque on the shaft changes.
Despite all the advantages of a synchronous motor, the main disadvantages limiting their use are the complexity of the design, the presence of an exciter, high price, and difficulty in starting. Therefore, synchronous motors are mainly used for powers above 100 kW.
Main applications: pumps, compressors, fans, engine-generator sets.
Asynchronous motors
According to the design principle, asynchronous motors are divided into motors with squirrel cage and wound rotor. However, most of the electric motors used are asynchronous with a squirrel-cage rotor. Such widespread use is due to the simplicity of their design, maintenance and operation, high reliability, and relatively low cost. The disadvantages of such motors are a large starting current, a relatively low starting torque, sensitivity to changes in network parameters, and a frequency converter is required for smooth speed control. In addition, asynchronous motors consume reactive power from the network. The limit for the use of asynchronous electric motors with a squirrel-cage rotor is determined by the power of the power supply system of a particular enterprise, since large starting currents with low system power create large voltage drops.
The use of asynchronous motors with a wound rotor helps to reduce the starting current and significantly increase the starting torque, thanks to the introduction of starting rheostats into the rotor circuit. However, due to the complexity of their design, and as a consequence, the increase in cost, their use is limited. The main application is drives of mechanisms with particularly difficult starting conditions. To reduce the starting currents of an asynchronous motor with a squirrel-cage rotor, a soft starter or a frequency converter can be used.
In systems where stepwise changes in speed are necessary (for example, elevators), multi-speed asynchronous motors are used. In mechanisms that require stopping within a certain time and fixing the shaft when the supply voltage disappears, asynchronous motors with an electromagnetic brake are used (metalworking machines, winches). There are also asynchronous motors with increased slip, which are designed to operate in intermittent modes, as well as modes with pulsating loads.
Once the type of electric motor has been determined, fully taking into account the specifics of the working mechanism and operating conditions, it is necessary to determine the operating parameters of the motor: power, rated and starting torque, rated voltage and current, operating mode, power factor, energy efficiency class.
Power and moments
In general, for a qualified selection of an electric motor, the load diagram of the mechanism must be known. However, in the case of a constant or slightly varying load without speed control, it is enough to calculate the required power using theoretical or empirical formulas, knowing the operating parameters of the load. Below are formulas for calculating the motor power P2 [kW] of some mechanisms.
- Fan
where Q [m3/s] – fan performance,
N [Pa] – pressure at the fan outlet,
ηvent, ηper – efficiency of the fan and transmission mechanism, respectively,
kз – safety factor.
- Pump
where Q [m3/s] – pump capacity,
g=9.8 m/s2 – acceleration of free fall,
H [m] – design lifting height,
ρ [kg/m3] – density of the pumped liquid,
ηus, ηper – efficiency of the pump and transmission mechanism, respectively,
kз – safety factor.
- Piston compressor
where Q [m3/s] – compressor capacity,
A [J/m3] – work of isothermal and adiabatic compression of atmospheric air with a volume of 1 m3 with a pressure of 1.1 105 Pa to the required pressure,
ηcomr, ηper – efficiency of the compressor and transmission mechanism, respectively,
kз – safety factor.
In addition, it is necessary to compare the starting torque of the engine (especially in the case of an asynchronous squirrel-cage rotor) and the working mechanism, since some mechanisms have increased resistance at the moment of starting. It should also be borne in mind that when replacing a three-phase asynchronous motor with a single-phase starting torque, the latter is almost three times less and the mechanism that previously functioned successfully may not budge.
The torque M [Nm] developed by the electric motor and the useful power on the shaft P2 [kW] are related by the following relationship
Total power consumed from the network:
for DC motors (also active)
for AC motors
while the consumed active and reactive power respectively
In the case of a synchronous motor, the value of Q1 may turn out to be negative, which means that the motor supplies reactive power to the network.
It is important to note the following. You should not choose a motor with a large power reserve, as this will lead to a decrease in its efficiency, and in the case of an AC motor, also to a decrease in power factor.
Voltage and current
When choosing the electric motor voltage, it is necessary to take into account the capabilities of the enterprise's power supply system. At the same time, it is inappropriate to choose a motor with low voltage at high powers, since this will lead to an unjustified increase in the cost of not only the motor, but also the supply wires and switching equipment due to an increase in copper consumption.
If, when starting, the moment of load resistance is small and to reduce the starting currents of an asynchronous motor with a squirrel-cage rotor, a starting method can be used by switching from star to delta, it is necessary to provide output to the terminal box of all six terminals of the stator winding. In general, the use of a “star” connection circuit is preferable, since in a “delta” connection there is a circuit for the flow of zero-sequence currents, which lead to heating of the winding and a decrease in the efficiency of the motor; in a “star” connection there is no such circuit.
Operating mode
The load on the electric motor can change in various ways during operation. GOST provides eight operating modes.
- Continuous S1 – operating mode at constant load during the time during which the engine temperature reaches a steady value. The power of the engine operating in this mode is calculated based on the power consumed by the mechanism. Formulas for calculating the power of some mechanisms (pump, fan, compressor) are given above.
- Short-term S2 is a mode in which, during switching on to a constant load, the engine temperature does not have time to reach a steady value, and during shutdown, the motor is cooled to ambient temperature. If motor S1 is used to operate in mode S2, it is necessary to check it only for overload capacity, since the temperature does not have time to reach the permissible value.
- Intermittent-short-term S3 – a mode with periodic shutdown of the engine, in which during switching on the temperature does not have time to reach a steady value, and during switching off - the ambient temperature. Calculation of the power of a conventional electric motor for operation in mode S3 is carried out using the methods of equivalent quantities, taking into account pauses and losses in transient modes. In addition, the engine must be checked for the permissible number of starts per hour. In case of a large number of starts per hour, it is recommended to use motors with increased slip. These electric motors have increased rotor winding resistance, and, consequently, lower starting and braking losses.
- Intermittent with frequent starts S4 and intermittent with frequent starts and electrical braking S5. These modes are treated similarly to mode S3.
- Intermittent S6 - a mode in which engine operation under load is periodically replaced by idle operation. Most engines running continuously have a varying load pattern.
At the same time, to make a reasonable choice of engine for the purpose of its optimal use, it is recommended to use methods of equivalent quantities.
Climatic versions of electric motors
When choosing an electric motor, not only its technical characteristics are taken into account, but also the environmental conditions in which it will be operated.
Modern electric drives are available in different climatic versions. Categories are marked with corresponding letters and numbers:
- U – models for use in temperate climates;
- HL – electric motors adapted to cold climates;
- TS – versions for dry tropical climates;
- TV – versions for humid tropical climates;
- T – universal versions for tropical climates;
- О – electric motors for operation on land;
- M – engines for operation in marine climates (cold and temperate);
- B - models that can be used in any area on land and at sea.
The numbers in the model nomenclature indicate the type of its placement:
- 1 – possibility of operation in open areas;
- 2 – installation in rooms with free access of air;
- 3 – operation in closed workshops and premises;
- 4 – use in industrial and other premises with the ability to regulate climatic conditions (availability of ventilation, heating);
- 5 – versions designed for operation in areas of high humidity, with high condensation formation.
Advantages and disadvantages of electric bike kits
An electric kit for the rear or front wheel has a number of advantages and disadvantages.
Among the advantages are noted:
- a bicycle equipped with an electric drive has a higher maximum and initial speed;
- the entire mechanism is more reliable, some parts have a long wear life;
- the ability to install a bicycle computer to monitor statistical data and speed;
- a universal means of transportation to work, to the store or home without effort or special financial expenses;
- Without exceeding the motor power of 250W, this electric bike does not require any documents.
The disadvantages include:
- large weight of a relatively ordinary bicycle (after all, with an upgrade, the total weight increases by about 6 kilograms);
- relatively expensive installation of the entire mechanism (the cost of an electric motor and a good battery can exceed $600);
- there is a constant need to charge the bike, thereby reducing the autonomy of its use in any conditions;
- temperatures below 0 or above 35 degrees significantly reduce the shelf life of electronic components;
- Damage or fall of such a bicycle can result in large financial costs;
- when traveling in rain or thick fog, you should think about completely sealing the entire mechanism;
- the battery is still a consumable, so after about 5 years you need to buy a new battery;
- Since such a bicycle becomes much more expensive after installing the electrical kit, you need to provide it with good anti-theft protection.
Energy efficiency
Efficient energy consumption while maintaining high power reduces ongoing operating costs while increasing motor performance. Therefore, when choosing a drive, the energy efficiency class must be taken into account.
Technical documentation and catalogs must indicate the energy efficiency class of the engine. It depends on the efficiency indicator.
Experimental studies carried out in test and operating modes show that a 55 kW electric motor of high energy efficiency class reduces electricity consumption by 8-10 thousand kW annually.
Other useful materials:
Gearbox from “A” to “Z” How to choose a geared motor Selecting a frequency converter Connecting and setting up a frequency converter