При проектировании импульсных трансформаторов использовались следующие требования:
- высокая производительность
- небольшие размеры
- минимальное рабочее напряжение
- низкая частота сбоев
- низкий ток холостого хода
Особенности создания блока питания
Всем техническим устройствам нужно питание. Разница в силе тока и напряжения, которые дают мощность.
Все устройства электропитания делятся на два вида:
- Трансформаторные. Эти блоки питания весьма просты в производстве для новичков в радиотехническом деле. Невысокий уровень магнитных излучений явное преимущество этих агрегатов. Единственный их недостаток это объемный трансформатор, что делает устройство весьма габаритным;
- Бестрансформаторные. Более миниатюрны, так как отсутствует громоздкий трансформатор в классическом виде. Высокочастотный крохотный трансформатор снижает количество витков и габариты магнитопровода.
Желание радиолюбителей заполучить миниатюрные конструкции явилось причиной возникновения разнообразных микросхем, которые содержат в себе множество электроэлементов.
В основе каждого электроприбора микросхема величиной питания до пяти вольт. Дополнительные элементы при этом могут получать питание до двенадцати вольт постоянного тока.
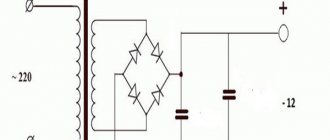
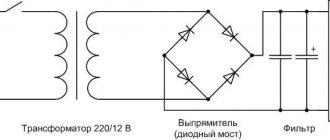
Всем известно, что напряжение в обычной розетке двести двадцать вольт, а частота напряжения пятьдесят герц, подавать такое напряжение на микросхему нельзя, так как она сразу сломается. В этом случае поможет блок питания, который снизит напряжение до нужного уровня. Конструкция блока питания проста.
Основными элементами являются:
- Трансформатор.
- Выпрямитель
- Фильтр.
- Стабилизатор.
Определение стабильности цифровой петли обратной связи с помощью билинейного преобразования
Если для формирования компенсации в петле обратной связи используется цифровой сигнальный процессор DSP (англ. DSP — Digital Signal Processor), стабильность такого цифрового контура может быть достигнута с помощью преобразования Лапласа для систем с дискретными сигналами.
В такой цифровой системе в качестве входного сигнала предусмотрен уже не непрерывный во времени сигнал, а дискретный в виде выборок с определенной частотой, называемой частотой дискретизации. Таким образом, значения переменных в s-плоскости должны быть преобразованы в дискретные значения Z-плоскости с выборкой по времени с помощью билинейного преобразования, известного как преобразование Тастина.
Результатом данного отображения является то, что устойчивая область в Z-плоскости превращается в окружность с радиусом, равным 1, в так называемую единичную окружность (рис. 17).
Рис. 17. Единичная окружность Z-плоскости
Удаленный правый край окружности (w = 0) представляет собой постоянный ток. Удаленный левый край окружности представляет собой частоту наложения спектров. Любые полюса, которые лежат вне этого круга, будут неустойчивыми. Полюса петли обратной связи теперь могут быть нанесены в Z-плоскости. Положения полюсов представляют нормированные отклики на частоту дискретизации, в отличие от сигналов непрерывных по времени, как это представлялось в S-плоскости.
Цифровая компенсация, во-первых, использует частоту дискретизации цифрового сигнального процессора, которая намного выше, чем системная частота перехода, так что любые расчеты являются точными. Для того чтобы найти значения параметров компенсации, здесь возможны два общих подхода. Первый — переработка в цифровую форму параметров компенсации на основе первичной разработки аналоговой системы управления, а второй — прямая разработка уже непосредственно цифрового управления. При переносе аналогового управления в цифровой вариант первоначально устанавливается линейная модель импульсного преобразователя. Причем компенсация петли обратной связи моделируется обычно в S-плоскости. А потом, для того чтобы завершить проектирование уже цифровой компенсации, результаты полученной аналоговой компенсации отображаются в z-плоскость. При непосредственном подходе к проектированию цифрового управления дискретная модель импульсного преобразователя является полностью моделируемой с использованием цифрового управления, а решение в части компенсации рассчитывается непосредственно в Z-плоскости. Это требует применения точных моделей всех аналоговых элементов, а моделирование осуществляется с помощью таких программ, как Spice или Matlab.
Результат обоих методов один и тот же — рассчитанная матрица значений сохраняется как таблица преобразования. DSP или микроконтроллер будут получать оцифрованный входной сигнал, вводить его для вычисления в матрицу, а на выходе иметь полученное значение либо как аналоговый сигнал управления, либо, что используется чаще всего, как скорректированный выходной сигнал управления непосредственно самого ШИМ-драйвера. В последнем случае схемы компаратора и цепи формирования ШИМ также будут синтезированы в цифровом виде. Это исключает ошибки контура аналогового управления, связанные с компенсацией наклона, и нестабильность RHP. Если требуется обрабатывать иной режим работы компенсации обратной связи на отклик, то цифровой контроллер может плавно переключаться между таблицами преобразования без сброса выхода преобразователя. Это уникальная способность, не свойственная аналоговым контроллерам. Таким образом, количество компромиссов, которым нужно следовать при выборе необходимой характеристики компенсации, значительно снижается.
Именно это отсутствие компромиссов и способность буквально мгновенно переключаться между быстрой переходной характеристикой или стабильным выходом и делает цифровой контур обратной связи таким привлекательным. Поскольку стоимость микроконтроллеров продолжает снижаться, то все больше и больше DC/DC-преобразователей будут мигрировать в сторону контроллеров с полностью цифровыми или гибридными петлями обратной связи.
Простой блок питания
Нередко возникает необходимость в питании нескольких микросхем или транзисторов. В этом случае можно сделать маломощный блок питания.
Неплохими вариантами являются 78L05, 78L12, 79L05, 79L08-стабилизаторы.
Эти конструкции рассчитаны на ток в сто миллиампер, хотя весьма миниатюрны и компактны. Их установка на радиатор не требуется.
- Смастерить блок питания самостоятельно просто. Напряжение подается посредствам стабилизатора.
- В этой схеме стабилизатор является ограничителем потока элементов.
- Разрешенное значение один ампер, поэтому остальные элементы блока должны быть рассчитаны на ток более одного ампера.
- То есть после выравнивания, вход стабилизатора нужно подать на несколько вольт больше выхода для слаженной работы.
- Не завышать значение U, чтобы не допустить перегрев микросхемы.
Регулируемый блок питания
Блок питания можно сделать регулируемый. Вход напряжения такого должен быть не более тридцати вольт, при этом сила тока не более десяти ампер. Обязательно встроить защиту от замыканий.
Сделать такое устройство можно из недорогих общедоступных деталей. В представленной схеме стабилизатор рассчитан на силу тока не превышающую полтора ампера. В схему входит транзистор, который способен пропускать большое напряжение.
Если вращать ручку переменного резистора, то изменяется напряжение на выходе конструкции. Помимо этого. есть несколько шунтирующих резистора с сопротивлением двести Ом. После отключения блока питания конденсатор разряжается посредствам резистора.
Гарантия на продукцию
Источники питания хорошего качества имеют заявленный длительный период защиты, который составляет не менее нескольких лет. Тем не менее срок службы БП должен быть намного больше, чем гарантийный срок заявленный производителем, особенно для продуктов которые используются в условиях, соответствующих спецификациям.
В общем покупая БП стоит руководствоваться не только его параметрами в плане вольты/амперы, но и обращать внимание на указанные выше моменты, и тогда блок прослужит долго и счастливо, не создавая проблем ни для сети, ни для подключенных к нему устройств.
- РЕМОНТ СХЕМ: ДЕМОНТАЖ-МОНТАЖ, ПОДБОР АНАЛОГОВ
- ЗАЩИТА ОТ ОБРАТНОЙ ПОЛЯРНОСТИ
- СХЕМА СЕКВЕНСОРА
Зарядка из блока питания
Многие, кто немного разбирается в технике задаются вопросом: как из блока питания сделать зарядное устройство для компьютера?
- Для этого в наличии должен быть блок питания в рабочем состоянии.
- Подойдет старый мощностью в двести ватт. Ведь главной доработкой будет поднять напряжение.
- Первое, отпаять провода, выходящие из агрегата, кроме провода зеленого цвета. Этот провод припаять к минусовым контактам.
- Таким образом, устройство будет включаться автоматически при подключении к электросети.
- Далее, припаять провода к минусу и двенадцативольтной шине там, где раньше были провода желтого цвета.
- Дальше работы должны происходить с рабочим режимом широтно-импульсной модуляции, то есть с микросхемой TL494.
- Из трех резисторов нужно выбрать тот, который соединен с выводами блока +12В. Необходимо отпаять этот резистор и изменить его сопротивление, добавив сопротивление.
Нужно иметь ввиду, что блоки имеют разный номинал резистора. Все зависит от имеющихся деталей и схем. После того, как достигнуто нужное сопротивление, нужно найти резистор с сопротивлением близким по значению.
СТАТЬЯ ПОДГОТОВЛЕНА НА ОСНОВЕ КНИГИ А. В. ГОЛОВКОВА и В. Б ЛЮБИЦКОГО «БЛОКИ ПИТАНИЯ ДЛЯ СИСТЕМНЫХ МОДУЛЕЙ ТИПА IBM PC-XT/AT» ИЗДАТЕЛЬСТВА «ЛАД и Н»
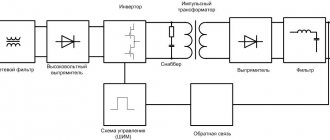
СТАБИЛИЗАЦИЯ ВЫХОДНЫХ НАПРЯЖЕНИЙ ИМПУЛЬСНЫХ БЛОКОВ ПИТАНИЯ
Схема стабилизации выходных напряжений в рассматриваемом классе ИБП представляет собой замкнутую петлю автоматического регулирования (рис. 31). Эта петля включает в себя: • схему управления 8; • согласующий предусилительный каскад 9; • управляющий трансформатор DT; • силовой каскад 2; • силовой импульсный трансформатор РТ; • выпрямительный блок 3; • дроссель межканальной связи 4; • блок фильтров 5; • делитель напряжения обратной связи 6; • делитель опорного напряжения 7. В составе схемы управления 8 имеются следующие функциональные узлы: • усилитель сигнала рассогласования 8.1 с цепью коррекции Zk; • ШИМ-компаратор (модулятор) 8.2; • генератор пилообразного напряжения (осциллятор) 8.3; • источник опорного стабилизированного напряжения Uref 8.4. В процессе работы усилитель сигнала рассогласования 8.1 сравнивает выходной сигнал делителя напряжения б с опорным напряжением делителя 7. Усиленный сигнал рассогласования поступает на широтно-импульсный модулятор 8.2, управляющий предоконечным каскадом усилителя мощности 9, который, в свою очередь, подает модулированный управляющий сигнал на силовой каскад преобразователя 2 через управляющий трансформатор DT. Питание силового каскада производится по бестрансформаторной схеме. Переменное напряжение питающей сети выпрямляется сетевым выпрямителем 1 и подается на силовой каскад, где сглаживается конденсаторами емкостной стойки. Часть выходного напряжения стабилизатора сравнивается с постоянным опорным напряжением и затем осуществляется усиление полученной разности (сигнала рассогласования) с введением соответствующей компенсации. Широтно-импульсный модулятор 8.2 преобразует аналоговый сигнал управления в широтно-модулированный сигнал с переменным коэффициентом заполнения импульса. В рассматриваемом классе ИБП схема модулятора осуществляет сравнение сигнала, поступающего с выхода усилителя сигнала рассогласования с напряжением пилообразной формы, которое получается от специального генератора 8.3.
Рисунок 31. Контур регулирования типового импульсного блока питания на основе управляющей микросхемы TL494.
Основными передаточными функциями ИБП являются функция вход-выход, характеризующая способность схемы подавлять входные шумы и пульсации и не пропускать их на выход, и функция управление-выход, характеризующая степень изменения выходных напряжений при различных коэффициентах заполнения импульсов. В системе с замкнутой обратной связью коэффициент заполнения импульсов определяется усиленным и компенсированным сигналом рассогласования. Поясним это подробнее. Допустим, некоторое возмущающее воздействие (например, увеличение токопотребления в нагрузке) первоначально вызвало отклонение выходного напряжения на некоторую величину в сторону уменьшения. Поэтому между опорным напряжением и сигналом обратной связи изменяется величина рассогласования. Благодаря этому увеличивается ширина выходных импульсов модулирующей схемы 8-2. Поэтому выходное напряжение увеличивается, но не достигает прежнего значения, а устанавливается на уровне чуть меньшем, чем до воздействия возмущения, и сохраняется на этом новом уровне до тех пор, пока повышенное токопотребление в нагрузке не прекратится. Вновь установившийся уровень выходного напряжения обеспечивает ту величину сигнала рассогласования, которая, будучи усиленной усилителем ошибки 8.1, определяет новую ширину управляющего импульса, поддерживающую этот новый уровень выходного напряжения. Другими словами, система переходит в новое состояние динамического равновесия, но при большем, чем ранее, сигнале рассогласования и другой (большей) ширине управляющих импульсов. Совершенно очевидно, что чем больше коэффициент усиления усилителя ошибки, тем меньше изменение выходного напряжения, которое обусловит необходимую для поддержания этого напряжения ширину управляющих импульсов. Поэтому, казалось бы, коэффициент усиления усилителя 8.1 желательно иметь максимально большим. Однако величина усиления ограничивается условием устойчивой работы всей петли регулирования в целом. Значение коэффициента усиления по петле обратной связи равно произведению коэффициентов усиления типовых звеньев, входящих в контур обратной связи, а его фазовый сдвиг равен сумме фазовых сдвигов типовых звеньев. Поэтому коэффициент усиления по петле обратной связи и его фаза определяют стабильность работы системы и возможность возникновения в ней генерации. Для того, чтобы система работала устойчиво, АЧХ и ФЧХ усилителя 8.1 схемотехнически подвергается коррекции с помощью корректирующей цепи Zk, которая включается как звено отрицательной обратной связи, охватывающей усилитель ошибки 8.1. При этом конфигурация цепочки Zk обеспечивает необходимую зависимость глубины этой ООС от частоты усиливаемого сигнала. Проще говоря, Zk — это цепь, при помощи которой вводится отрицательная частотно-зависимая обратная связь. Поясним подробнее физический смысл включения этой очень важной цепочки. Как известно из теории, для возникновения генерации в замкнутой системе необходимо, чтобы выполнялись два условия. Первое из этих условий называется балансом фаз и заключается в том, чтобы суммарный фазовый сдвиг, вносимый всеми звеньями замкнутой системы на данной частоте, был бы равен 360 градусов. Тогда обратная связь превращается в положительную и появляется возможность для самовозбуждения системы. Второе условие, называемое балансом амплитуд, заключается в том, чтобы коэффициент петлевого усиления на данной частоте был бы больше 1. При выполнении обоих этих условий одновременно в замкнутой петле регулирования возникает генерация. Применительно к контуру регулирования выходных напряжений ИБП это будет выглядеть примерно таким же образом. Фазовый сдвиг, вносимый каждым из элементов петли регулирования, не является постоянным, а зависит от частоты. Поэтому обязательно имеется некоторая час тота, на которой суммарный фазовый сдвиг петли регулирования становится равным 360 градусов. Именно на этой частоте и возможно возникновение генерации. Эта возможность реализуется, если коэффициент петлевого усиления, который, как было отмечено, определяется произведением коэффициентов усиления всех звеньев петли, будет иметь величину, превышающую 1 на указанной частоте. Из сказанного ясно, что для того, чтобы избежать возникновения такой паразитной генерации, имеется только один путь. Поскольку петлевое усиление определяется в основном усилителем ошибки 8.1, то этот путь заключается в том, чтобы скорректировать АЧХ усилителя ошибки (а значит и АЧХ всей петли регулирования в целом) таким образом, чтобы на частоте, где суммарный фазовый сдвиг в петле становится равным 360 градусов, коэффициент петлевого усиления был бы меньше 1. Функцию такого изменения АЧХ усилителя 8.1 и выполняет цепь коррекции Zk, которая обычно выполняется в виде интегрирующего RC-звена. Несмотря на то, что цепь компенсации Zk является очень малой частью полной схемы ИБП, именно она является «ключом» для устойчивой работы системы. Поясним все вышесказанное применительно к рассматриваемому классу ИБП на основе управляющей микросхемы TL494. Стабилизация выходных напряжений осуществляется методом широтно-импульсной модуляции. Суть его заключается в том, что сигнал обратной связи, пропорциональный уровню напряжения в канале +5В, при гальванической подаче его на неинвертирующий вход усилителя ошибки DA3 (вывод 1 микросхемы TL494), определяет ширину выходного импульса микросхемы и изменяет ее в соответствии с отклонениями выходного напряжения канала +5Вот номинального значения. Рассмотрим динамику процесса стабилизации. Пусть под воздействием какого-либо дестабилизирующего фактора (например, скачкообразного изменения нагрузки) выходное напряжение в канале +5В уменьшилось. Тогда уменьшится уровень сигнала обратной связи на неинвертирующем входе усилителя ошибки DA3. Следовательно, выходное напряжение усилителя уменьшится. Поэтому увеличится ширина выходных импульсов микросхемы на выводах 8 и 11. Значит увеличится время открытого состояния за период силовых ключевых транзисторов инвертора. Следовательно, большую, чем ранее, часть периода через первичную обмотку силового импульсного трансформатора будет протекать нарастающий ток. Следовательно, большую, чем ранее, часть периода в сердечнике трансформатора будет существовать нарастающий магнитный поток, а значит, дольше, чем ранее, на вторичных обмотках этого трансформатора будут действовать наведенные этим потоком ЭДС Другими словами, импульсы ЭДС на вторичной стороне силового трансформатора станут шире (при неизменном периоде следования). Поэтому увеличивается постоянная составляющая, выделяемая сглаживающим фильтром из импульсной последовательности после выпрямления, т.е. выходное напряжение канала +5В увеличится, возвращаясь к номинальному значению. При увеличении выходного напряжения +5В процессы в схеме будут обратными. Стабилизация выходных напряжений остальных каналов может осуществляться по-разному в разных схемах. Традиционным схемотехническим решением является применение метода групповой стабилизации. Для этого в схему блока включается специальный элемент межканальной связи, в качестве которого обычно используется многообмоточный дроссель. При этом изменение любого выходного напряжения приводит благодаря электромагнитной связи между обмотками дросселя групповой стабилизации к соответствующему изменению выходного напряжения +5В с последующим включением механизма ШИМ. Дроссель групповой стабилизации обычно представляет собой четыре обмотки (по одной обмотке в каждом выходном канале БП), намотанные на одном кольцевом ферритовом сердечнике и включенные синфазно. В этом случае дроссель выполняет в схеме две функции: • функцию сглаживания пульсации выпрямленного напряжения — при этом каждая обмотка для своего канала представляет сглаживающий дроссель фильтра и работает как обычный дроссель; • функцию межканальной связи при групповой стабилизации — при этом благодаря электромагнитной связи через общий сердечник дроссель работает как трансформатор, передающий изменения величины токов, протекающих через обмотки каналов +12В, -12В и -5В в обмотку канала +5В. Поясним это подробнее. Особенностью работы ИБП в персональном компьютере является то, что потребляемый от ИБП ток зависит от выполняемой в данный момент операции, т.е. скачкообразно изменяется. Пусть, например, в данный момент времени скачкообразно возросла токовая нагрузка в канале +12В. Увеличение тока через обмотку дросселя, включенную в канале +12В, вызывает увеличение магнитного потока в сердечнике дросселя. Изменение магнитного потока, в свою очередь, наводит во всех остальных обмотках дросселя ЭДС, полярность которых (благодаря синфазной намотке обмоток дросселя) во всех каналах оказывается включенной встречно по отношению к выходным напряжениям выпрямителей. Поэтому выходные напряжения всех каналов (в том числе и канала +5 В) уменьшаются. Сигнал обратной связи с канала +5 В гальванически передается на схему ШИМ, которая увеличивает длительность выходных управляющих импульсов. Поэтому выходные напряжения всех каналов ИБП увеличиваются, возвращаясь к номинальному значению. При изменении токовой нагрузки в других каналах схема работает аналогично. Однако коэффициент стабилизации выходных напряжений во всех каналах, кроме канала +5В, получается невысоким, т.е. стабилизация напряжений +12В, -12В и -5В будет хуже, чем в канале +5В, за которым производится непосредственное «слежение». Такой способ полной групповой стабилизации используется, например, в ИБП KYP-150W (рис.27). Существуют варианты импульсных блоков питания с неполной групповой стабилизацией, как например LPS-02-150ХТ. В схеме этого ИБП через дроссель групповой стабилизации «связаны» только три выходных напряжения (+5В, +12В и -12В). Стабилизация напряжения -5В производится другим способом — с помощью линейного интегрального стабилизатора типа 7905 (рис.28). Дроссель связи в этом случае выполнен трехобмоточным. Механизм использования дросселя групповой стабилизации применяется в подавляющем большинстве случаев, однако изредка встречаются ИБП, в которых этот механизм не используется. В таких ИБП на выходе канала выработки -5В и -12В стоят стабилизаторы напряжений типа 7905 и 7912 (гораздо реже — 7805 и 7812), а обратная связь на микросхему IC1 по выводу 1 заведена через рези-стивный делитель-датчик от выходных напряжений +5В и +12В (рис. 32). Сигнал обратной связи в этом случае является суммарным, т.к. уровень его определяется уровнями напряжений на обеих шинах, и поэтому оба выходных напряжения (+5В и +12В) стабилизируются методом ШИМ. И, наконец, встречаются варианты ИБП, в которых напряжение -5В получается из -12В с помощью интегрального стабилизатора, а само напряжение -12В вообще не стабилизируется. В схемах последних двух типов многообмоточный дроссель межканальной связи отсутствует. Схемы стабилизации могут различаться, кроме того, способом подачи сигнала обратной связи и опорного напряжения на входы усилителя ошибки DA3. При этом в этих цепях могут быть установлены регулировки, позволяющие изменять уровни выходных напряжений ИБП при его настройке. Поскольку усилитель ошибки по напряжению DA3 является дифференциальным усилителем, т.е. усиливает разность подаваемых на его входы 1 и 2 сигналов, то регулировка может стоять в цепи как одного, так и другого входа. При этом неинвертирующий вход DA3 (вывод 1 микросхемы) всегда используется для подачи сигнала обратной связи, а инвертирующий вход (вывод 2 микросхемы) — для подачи опорного напряжения. Это объясняется тем, что для нормальной работы петли регулирования выходное напряжение усилителя ошибки DA3 должно изменяться в фазе с сигналом обратной связи. Регулировка выходных напряжений блока может осуществляться двояко: • с помощью изменения уровня сигнала обратной связи при неизменном опорном напряжении на выводе 2; • с помощью изменения уровня опорного напряжения на выводе 2 при неизменном уровне сигнала обратной связи по входу 1. Первый из этих случаев иллюстрируется рис. 32, а второй — рис. 33.
Рисунок 32. Регулировка уровня выходных напряжений ИБП PS-200B.
Рисунок 33. Регулировка уровня выходных напряжений ИБП LPS-02-150XT.
Рисунок 34. Регулировка уровня выходных напряжений ИБП «Appis».
Рисунок 35. Регулировка уровня выходных напряжений ИБП GT-200W.
Однако наиболее распространенным является случай, когда регулировка, позволяющая воздействовать на выходные напряжения блока, отсутствует. В этом случае напряжение на любом из входов 1 или 2 выбирается произвольным в пределах от +2,5 до +5 В, а напряжение на оставшемся входе подбирается с помощью высокоом-ного шунтирующего резистора таким, чтобы блок выдавал оговоренные в паспорте выходные напряжения в номинальном нагрузочном режиме. Рис. 35 иллюстрирует случай подбора уровня опорного напряжения, рис. 34 — показывает случай подбора уровня сигнала обратной связи. Ранее было отмечено, что значение нестабильности выходного напряжения при воздействии любых дестабилизирующих факторов (изменение тока нагрузки, напряжения питающей сети и температуры окружающей среды) можно было бы уменьшить, увеличивая коэффициент усиления цепи обратной связи (коэффициент усиления усилителя DA3). Однако максимальное значение коэффициента усиления DA3 ограничивается условием обеспечения устойчивости. Поскольку как ИБП, так и нагрузка содержат реактивные элементы (индуктивность или емкость), накапливающие энергию, то в переходных режимах происходит перераспределение энергии между этими элементами. Это обстоятельство может привести к тому, что при определенных параметрах элементов переходный процесс установления выходных напряжений ИБП примет характер незатухающие колебаний, или же величина перерегулирования в переходном режиме будет достигать недопустимых значений.
Рисунок 36. Переходные процессы (колебательный и апериодический) выходного напряжения ИБП при скачкообразном изменении тока нагрузки (а) и входного напряжения (б).
На рис. 36 изображены переходные процессы выходного напряжения при скачкообразном изменении тока нагрузки и входного напряжения. ИБП работает устойчиво, если выходное напряжение вновь принимает установившееся значение после прекращения действия возмущения, выведшего его из первоначального состояния (рис. 37,а).
Рисунок 37. Переходные процессы выходного напряжения ИБП в устойчивой (а) и неустойчивой (б) системах.
Если это условие не соблюдается, то система является неустойчивой (рис.37,6). Обеспечение устойчивости импульсного блока питания является необходимым условием его нормального функционирования. Переходный процесс в зависимости от параметров ИБП носит колебательный или апериодический характер, при этом выходное напряжение ИБП имеет определенное значение перерегулирования и время переходного процесса. Отклонение выходного напряжения от номинального значения выявляется в измерительном элементе цепи обратной связи (в рассматриваемых ИБП в качестве измерительного элемента используется резистивный делитель, подключаемый к шине выходного напряжения +5В). Из-за инерционности петли регулирования номинальное значение выходного напряжения устанавливается с определенным запаздыванием. При этом схема управления по инерции некоторое время еще будет продолжать свое воздействие в том же направлении. В результате этого имеет место перерегулирование, т.е. отклонение выходного напряжения от его номинального значения в направлении, противоположном первоначальному отклонению. Схема управления вновь изменяет выходное напряжение в противоположную сторону и т.д. Для того чтобы обеспечить устойчивость петли регулирования выходных напряжений ИБП при минимальной длительности переходного процесса, амплитудно-частотная характеристика усилителя ошибки DA3 подвергается коррекции. Это делается с помощью RC-цепочек, включаемых как цепи отрицательной обратной связи, охватывающей усилитель DA3. Примеры таких корректирующих цепочек показаны на рис. 38.
Рисунок 38. Примеры конфигурвции корректирующих RC-цепочек для усилителя ошибки по напряжению DA3.
Для уменьшения уровня помехообразования на вторичной стороне импульсного блока питания устанавливаются апериодические RC-цепочки. Остановимся подробнее на принципе их действия. Переходный процесс тока через диоды выпрямителя в моменты коммутации происходит в виде ударного возбуждения (рис. 39,а).
Рисунок 39. Временные диаграммы напряжения на диоде восстановления обратного сопротивления: а) — без RC-цепочки; б) — при наличии RC-цепочки.
Этот процесс создает электромагнитные помехи с частотой десятки мегагерц. Через межобмоточные емкости трансформатора и межвитковые емкости дросселя сглаживающего фильтра эти помехи проникают в первичную сеть и на выход ИБП. Для уменьшения этих помех необходимо изменить характер переходного процесса в области обратного тока диодов выпрямителя так, чтобы он имел апериодический характер. Преимущество апериодического переходного процесса перед колебательным заключается в снижении амплитуды первоначального выброса за счет заряда конденсатора RC-цепочки, а также в более быстром его затухании за счет резистора этой цепочки, который снижает добротность паразитного колебательного контура. Эффективным методом обеспечения апериодического характера переходного процесса и является подключение RC-цепочки параллельно обмоткам трансформатора и диодам выпрямителя, как показано на рис.30. При использовании RC-цепочки переходный процесс изменения тока через диод в режиме восстановления его обратного сопротивления имеет вид, показанный на рис. 39,6.
СОДЕРЖАНИЕ ЦИКЛА СТАТЕЙ ПО ИМПУЛЬСНЫМ БЛОКАМ ПИТАНИЯ:
| ОСНОВНЫЕ ПАРАМЕТРЫ ИМПУЛЬСНЫХ БЛОКОВ ПИТАНИЯ ДЛЯ IBM | Рассматриваются основные параметры импульсных блоков питания, приведена цоколевка разъема, принцип работы от напряжения сети 110 и 220 вольт, |
| УПРАВЛЕНИЕ СИЛОВЫМИ КЛЮЧАМИ ИМПУЛЬСНОГО БЛОКА ПИТАНИЯ ПРИ ПОМОЩИ TL494 | Подробно расписана микросхема TL494, схема включения и варианты использования для управления силовыми ключами импульсных блоков питания. |
| УПРАВЛЕНИЕ СИЛОВЫМИ КЛЮЧАМИ ИМПУЛЬСНОГО БЛОКА ПИТАНИЯ ПРИ ПОМОЩИ TL494 | Описаны основные способы управления базовыми цепями силовых транзисторов импульсных блоков питания, варианты построения выпрямителей вторичного питания. |
| СТАБИЛИЗАЦИЯ ВЫХОДНЫХ НАПРЯЖЕНИЙ ИМПУЛЬСНЫХ БЛОКОВ ПИТАНИЯ | Описаны варианты использования усилителей ошибки TL494 для стабилизации выходных напряжений, описан принцип работы дросселя групповой стабилизации. |
| СХЕМЫ ЗАЩИТЫ | Описаны несколько вариантов построения систем защиты импульсных болков питания от перегрузки |
| СХЕМА «МЕДЛЕННОГО ПУСКА» | Описаны принципы формирования мягкого старта и выработки напряжения POWER GOOD |
| ПРИМЕР ПОСТРОЕНИЯ ОДНОГО ИЗ ИМПУЛЬСНЫХ БЛОКОВ ПИТАНИЯ | Полное описание принципиальной схемы и ее работы импульсного блока питания |
Адрес администрации сайта
Импульсивный блок питания
Сделать импульсный блок питания не составляет труда. Это агрегат высокой мощности при небольших габаритах. Применяя импульсную схему есть возможность получить мощность в несколько тысяч ватт.
Особенность этих блоков в повышенных частотах при небольших витках в обмотках, в результате чего получается высокое напряжение. Главное, это трансформаторная намотка. Начальная обмотка должна составлять двести витков.
Потом необходимо поставить изоляцию и намотать еще десять витков. Сверху нужно сделать выходную обмотку. В старых мобилах можно найти сердечник для трансформатора. Две части сердечника склеить скотчем и собрать трансформатор.
Лабораторный блок питания
Схема лабораторного блока питания содержит LM324-микросхему. Она включает в себя четыре усилителя. Лабораторный блок является источником питания с высочайшей точностью выходного сигнала.
Он маленький, но с большим КПД. Этот агрегат должен иметь большой корпус. Необходимо подобрать радиатор под размер корпуса и трансформатор. Также понадобятся конденсаторы и шунт.
Схема агрегата включает в себя:
- Преобразователь;
- Пусковой механизм;
- Разнообразные компоненты.
Основу блока питания составляет ir2153. Схема содержит стабилизатор интенсивности для питания всей схемы. Пусковой механизм является сложным устройством в данном блоке. Устройство функционирует в линейном режиме и обеспечивает плавную регулировку тока и напряжения.
В данной схеме необходимо использовать несколько стабилизаторов. Один принимает напряжение не более тридцати вольт, а второй является более мощным.
Во время функционирования они не нагреваются. Усилитель подпитывается от более сильного стабилизатора. Опорное напряжение подается посредствам операционного усилителя.
Нестабильность правой полуплоскости
В топологиях, где выходной дроссель работает с непрерывным током через диод, — например, в повышающих, повышающе-понижающих, обратноходовых и прямоходовых преобразователях, — время проводимости диода добавляет задержку в цепи обратной связи. Это связано с тем, что когда нагрузка резко возрастает, то для передачи большей энергии в катушку индуктивности рабочий цикл должен быть временно увеличен. Тем не менее рабочий цикл большой длительности приводит к уменьшению времени проводящего состояния (tOFF) диода, так что средний ток через диод во время tOFF фактически уменьшается (рис. 9, справа). По мере того как выходной ток протекает через диод, этот ток также уменьшается. Данное условие сохраняется до тех пор, пока средний ток дросселя медленно увеличивается, а ток диода достигает заданного значения.
Рис. 9. Феномен правой полуплоскости
Это явление, когда ток через диод должен сначала уменьшиться, прежде чем он станет увеличиваться, известен как нестабильность правой полуплоскости (англ. Right Half Plane instability или RHP instability), потому что выходной ток временно находится в противофазе с рабочим циклом. Например, в простом повышающем преобразователе (рис. 10) частота временного дополнительного нуля находится в соответствии с выражением:
Рис. 10. Повышающий импульсный стабилизатор, упрощенная схема
RHP-нестабильность практически невозможно компенсировать, поскольку этот ноль изменяется еще и с током нагрузки. Решение состоит в том, чтобы выбрать параметры петли обратной связи с частотой среза существенно ниже самой низкой частоты появления RHP нулей (это имеет определенный недостаток, поскольку приводит к ухудшению времени реакции DC/DC-преобразователя на ступенчатое изменение нагрузки). Для того чтобы устранить подобную проблему в целом, необходимо использовать понижающе-повышающий преобразователь в режиме прерывистых токов (режим DCM).