When designing pulse transformers, the following requirements were used:
- high performance
- small sizes
- minimum operating voltage
- low failure rate
- low no-load current
Features of creating a power supply
All technical devices need power. The difference is the current and voltage that produce power.
All power supply devices are divided into two types:
- Transformer. These power supplies are very easy to manufacture for beginners in radio engineering. The low level of magnetic radiation is a clear advantage of these units. Their only drawback is the volumetric transformer, which makes the device quite large;
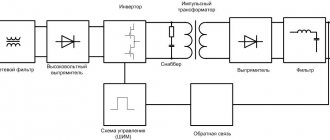
- Transformerless. More miniature, since there is no bulky transformer in the classic form. A tiny high-frequency transformer reduces the number of turns and dimensions of the magnetic circuit.
The desire of radio amateurs to obtain miniature structures was the reason for the emergence of various microcircuits that contain many electrical elements.
Each electrical appliance is based on a microcircuit with a power supply of up to five volts. Additional elements can receive power up to twelve volts DC.
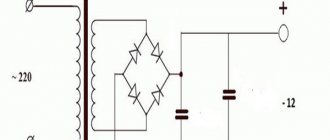
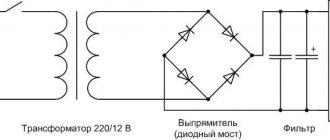
Everyone knows that the voltage in a regular outlet is two hundred and twenty volts, and the voltage frequency is fifty hertz; you cannot apply such voltage to a microcircuit, as it will immediately break. In this case, a power supply will help, which will reduce the voltage to the desired level. The design of the power supply is simple.
The main elements are:
- Transformer.
- Rectifier
- Filter.
- Stabilizer.
Determining Digital Feedback Loop Stability Using Bilinear Transformation
If a DSP (Digital Signal Processor) is used to generate compensation in the feedback loop, the stability of such a digital loop can be achieved using the Laplace transform for systems with discrete signals.
In such a digital system, the input signal is no longer a time-continuous signal, but a discrete one in the form of samples with a certain frequency, called the sampling frequency. Thus, the values of the s-plane variables must be converted to discrete time-sampled Z-plane values using a bilinear transformation known as the Tustin transform.
The result of this mapping is that the stable region in the Z-plane turns into a circle with a radius of 1, the so-called unit circle (Fig. 17).
Rice. 17. Z-Plane Unit Circle
The removed right edge of the circle ( w = 0) represents direct current. The outer left edge of the circle represents the aliasing frequency. Any poles that lie outside this circle will be unstable. Feedback loop poles can now be plotted in the Z-plane. The pole positions represent normalized responses to the sampling rate, as opposed to time-continuous signals as represented in the S-plane.
Digital compensation first uses the DSP sampling rate, which is much higher than the system transition frequency, so that any calculations are accurate. In order to find the values of the compensation parameters, two general approaches are possible here. The first is the processing of compensation parameters into digital form based on the initial development of an analog control system, and the second is the direct development of digital control itself. When transferring analog control to a digital version, the linear model of the pulse converter is initially established. Moreover, feedback loop compensation is usually modeled in the S-plane. And then, in order to complete the design of digital compensation, the results of the resulting analog compensation are displayed in the z-plane. In the direct approach to digital control design, the discrete switching converter model is fully modeled using digital control, and the compensation solution is calculated directly in the Z-plane. This requires the use of accurate models of all analog elements, and modeling is carried out using programs such as Spice or Matlab.
The result of both methods is the same - the calculated value matrix is stored as a lookup table. The DSP or microcontroller will receive the digitized input signal, enter it into the matrix for calculation, and at the output have the resulting value either as an analog control signal, or, what is used most often, as the adjusted output control signal directly from the PWM driver itself. In the latter case, the comparator circuits and PWM generation circuits will also be digitally synthesized. This eliminates analog control loop errors associated with tilt compensation and RHP instability. If a different mode of response feedback compensation operation is required to be handled, the digital controller can seamlessly switch between lookup tables without resetting the converter output. This is a unique ability not found in analog controllers. In this way, the number of compromises that must be made when selecting the required compensation characteristic is significantly reduced.
It's this lack of compromise and ability to literally switch instantly between fast transient response or stable output that makes a digital feedback loop so attractive. As the cost of microcontrollers continues to fall, more and more DC/DC converters will migrate towards controllers with fully digital or hybrid feedback loops.
Simple power supply
Often there is a need to power several microcircuits or transistors. In this case, you can make a low-power power supply.
Good options are 78L05, 78L12, 79L05, 79L08 stabilizers.
These designs are designed for a current of one hundred milliamps, although they are very miniature and compact. Their installation on the radiator is not required.
- Making your own power supply is easy. The voltage is supplied through a stabilizer.
- In this scheme, the stabilizer is a limiter on the flow of elements.
- The allowed value is one ampere, so the remaining elements of the block must be designed for a current of more than one ampere.
- That is, after equalization, the stabilizer input needs to be supplied a few volts more than the output for smooth operation.
- Do not overestimate the U value to prevent overheating of the microcircuit.
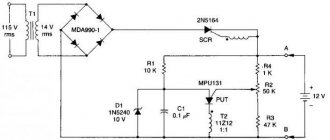
Adjustable power supply
The power supply can be made adjustable. The voltage input of this type should be no more than thirty volts, and the current strength should not be more than ten amperes. Be sure to build in short circuit protection.
Such a device can be made from inexpensive, publicly available parts. In the presented circuit, the stabilizer is designed for a current not exceeding one and a half amperes. The circuit includes a transistor that is capable of transmitting high voltage.
If you rotate the variable resistor knob, the voltage at the output of the structure changes. Besides. There are several shunt resistors with a resistance of two hundred ohms. After turning off the power supply, the capacitor is discharged through a resistor.
Product Warranty
Good quality power supplies have a stated long protection period of at least several years. However, the service life of the power supply should be much longer than the warranty period stated by the manufacturer, especially for products that are used in conditions that meet the specifications.
In general, when buying a power supply, you should be guided not only by its parameters in terms of volts/amps, but also pay attention to the points mentioned above, and then the unit will serve you happily ever after, without creating problems either for the network or for the devices connected to it.
- CIRCUIT REPAIR: DISASSEMBLY-INSTALLATION, SELECTION OF ANALOGUES
- REVERSE POLARITY PROTECTION
- SEQUENCER DIAGRAM
Charging from the power supply
Many who are a little versed in technology are wondering: how to make a charger for a computer from a power supply?
- To do this, you must have a power supply in working condition.
- An old one with a power of two hundred watts will do. After all, the main modification will be to increase the voltage.
- First, unsolder the wires coming out of the unit, except for the green wire. Solder this wire to the negative contacts.
- Thus, the device will turn on automatically when connected to the mains.
- Next, solder the wires to the minus and twelve-volt bus where there were previously yellow wires.
- Further work should take place with the operating mode of pulse width modulation, that is, with the TL494 microcircuit.
- Of the three resistors, you need to choose the one that is connected to the terminals of the + 12V block. It is necessary to unsolder this resistor and change its resistance by adding resistance.
It must be borne in mind that the blocks have different resistor values. It all depends on the available parts and diagrams. After the desired resistance has been achieved, you need to find a resistor with a resistance close in value.
STABILIZATION OF OUTPUT VOLTAGES OF PULSE POWER UNITSTHE ARTICLE WAS PREPARED BASED ON THE BOOK BY A. V. GOLOVKOV and V. B LYUBITSKY “POWER SUPPLY FOR SYSTEM MODULES OF THE IBM PC-XT/AT TYPE” BY THE PUBLISHING HOUSE “LAD&N”
STABILIZATION OF OUTPUT VOLTAGES OF PULSE POWER UNITS
The output voltage stabilization circuit in the class of UPS under consideration is a closed automatic control loop (Fig. 31). This loop includes: • control circuit 8; • matching preamplifier stage 9; • control transformer DT; • power stage 2; • power pulse transformer RT; • rectifier unit 3; • interchannel communication choke 4; • filter block 5; • feedback voltage divider 6; • reference voltage divider 7. The control circuit 8 contains the following functional units: • mismatch signal amplifier 8.1 with correction circuit Zk; • PWM comparator (modulator) 8.2; • sawtooth voltage generator (oscillator) 8.3; • source of stabilized reference voltage Uref 8.4. During operation, the mismatch signal amplifier 8.1 compares the output signal of voltage divider b with the reference voltage of divider 7. The amplified mismatch signal is supplied to the pulse-width modulator 8.2, which controls the pre-final stage of the power amplifier 9, which, in turn, supplies a modulated control signal to the power stage converter 2 via control transformer DT. The power cascade is powered using a transformerless circuit. The alternating voltage of the supply network is rectified by the network rectifier 1 and supplied to the power stage, where it is smoothed out by capacitors of the capacitive rack. Part of the output voltage of the stabilizer is compared with a constant reference voltage and then the resulting difference (mismatch signal) is amplified with the introduction of appropriate compensation. The 8.2 pulse-width modulator converts the analog control signal into a width-modulated signal with a variable duty cycle. In the class of UPS under consideration, the modulator circuit compares the signal coming from the output of the error signal amplifier with the sawtooth voltage, which is obtained from a special generator 8.3.
Figure 31. Regulatory loop of a typical switching power supply based on the TL494 control chip.
The main transfer functions of the UPS are the input-output function, which characterizes the ability of the circuit to suppress input noise and ripple and not let them pass to the output, and the control-output function, which characterizes the degree of change in output voltages at different duty cycles. In a closed-loop system, the duty cycle of the pulses is determined by the amplified and compensated error signal. Let's explain this in more detail. Let's say that some disturbing influence (for example, an increase in current consumption in the load) initially caused a deviation of the output voltage by a certain amount towards a decrease. Therefore, the amount of mismatch between the reference voltage and the feedback signal changes. Due to this, the width of the output pulses of the modulating circuit 8-2 increases. Therefore, the output voltage increases, but does not reach its previous value, but is set at a level slightly lower than before the disturbance, and remains at this new level until the increased current consumption in the load stops. The newly established level of the output voltage provides the magnitude of the error signal, which, being amplified by the error amplifier 8.1, determines the new width of the control pulse that supports this new level of output voltage. In other words, the system enters a new state of dynamic equilibrium, but with a larger mismatch signal than before and a different (larger) width of control pulses. It is quite obvious that the greater the gain of the error amplifier, the smaller the change in the output voltage, which will determine the width of the control pulses necessary to maintain this voltage. Therefore, it would seem that it would be desirable to have the gain factor of an 8.1 amplifier as high as possible. However, the magnitude of the gain is limited by the condition of stable operation of the entire control loop as a whole. The value of the feedback loop gain is equal to the product of the gain factors of the standard units included in the feedback loop, and its phase shift is equal to the sum of the phase shifts of the standard units. Therefore, the gain in the feedback loop and its phase determine the stability of the system and the possibility of generation occurring in it. In order for the system to operate stably, the frequency response and phase response of the amplifier 8.1 is circuit-corrected using the correction circuit Zk, which is switched on as a negative feedback link covering the error amplifier 8.1. In this case, the configuration of the Zk chain ensures the necessary dependence of the depth of this OOS on the frequency of the amplified signal. Simply put, Zk is a circuit through which negative frequency-dependent feedback is introduced. Let us explain in more detail the physical meaning of the inclusion of this very important chain. As is known from theory, for generation to occur in a closed system, two conditions must be met. The first of these conditions is called phase balance and is that the total phase shift introduced by all parts of the closed system at a given frequency should be equal to 360 degrees. Then the feedback turns into positive and the possibility of self-excitation of the system appears. The second condition, called amplitude balance, is that the loop gain at a given frequency be greater than 1. When both of these conditions are met simultaneously, generation occurs in a closed control loop. In relation to the UPS output voltage control loop, it will look approximately the same. The phase shift introduced by each element of the control loop is not constant, but depends on frequency. Therefore, there is necessarily a certain frequency at which the total phase shift of the control loop becomes equal to 360 degrees. It is at this frequency that generation can occur. This possibility is realized if the loop gain, which, as noted, is determined by the product of the gains of all parts of the loop, has a value greater than 1 at the specified frequency. From what has been said it is clear that in order to avoid the occurrence of such parasitic generation, there is only one way. Since the loop gain is determined mainly by the error amplifier 8.1, this way is to adjust the frequency response of the error amplifier (and therefore the frequency response of the entire control loop as a whole) so that at the frequency where the total phase shift in the loop becomes equal to 360 degrees , the loop gain would be less than 1. The function of such a change in the frequency response of the amplifier 8.1 is performed by the Zk correction circuit, which is usually performed in the form of an integrating RC link. Despite the fact that the Zk compensation circuit is a very small part of the complete UPS circuit, it is the “key” for stable operation of the system. Let us explain all of the above in relation to the class of UPS under consideration based on the TL494 control chip. Stabilization of output voltages is carried out using the pulse width modulation method. Its essence lies in the fact that the feedback signal, proportional to the voltage level in the +5V channel, when galvanically applied to the non-inverting input of the error amplifier DA3 (pin 1 of the TL494 microcircuit), determines the width of the output pulse of the microcircuit and changes it in accordance with deviations in the output voltage channel +5Here is the nominal value. Let us consider the dynamics of the stabilization process. Suppose that under the influence of some destabilizing factor (for example, an abrupt change in load), the output voltage in the +5V channel has decreased. Then the level of the feedback signal at the non-inverting input of the error amplifier DA3 will decrease. Consequently, the amplifier's output voltage will decrease. Therefore, the width of the output pulses of the microcircuit at pins 8 and 11 will increase. This means the open state time will increase during the period of the inverter’s power key transistors. Consequently, for a larger part of the period than before, an increasing current will flow through the primary winding of the power pulse transformer. Consequently, for a larger part of the period than before, an increasing magnetic flux will exist in the core of the transformer, which means that for longer than before, the EMF induced by this flow will act on the secondary windings of this transformer. In other words, the EMF pulses on the secondary side of the power transformer will become wider ( with a constant tracking period). Therefore, the constant component isolated by the smoothing filter from the pulse sequence after rectification increases, i.e. the output voltage of the +5V channel will increase, returning to the nominal value. When the output voltage increases +5V, the processes in the circuit will be reversed. Stabilization of the output voltages of the remaining channels can be carried out differently in different circuits. The traditional circuit solution is to use the group stabilization method. To do this, a special interchannel communication element is included in the block circuit, which is usually a multi-winding inductor. In this case, a change in any output voltage leads, thanks to the electromagnetic connection between the windings of the group stabilization inductor, to a corresponding change in the output voltage +5V with the subsequent activation of the PWM mechanism. The group stabilization choke usually consists of four windings (one winding in each output channel of the power supply unit), wound on one ring ferrite core and connected in phase. In this case, the inductor performs two functions in the circuit: • the function of smoothing the ripple of the rectified voltage - in this case, each winding for its channel represents a smoothing filter inductor and works like a regular inductor; • the function of inter-channel communication with group stabilization - in this case, thanks to electromagnetic communication through a common core, the inductor works as a transformer, transmitting changes in the magnitude of currents flowing through the windings of the +12V, -12V and -5V channels to the winding of the +5V channel. Let's explain this in more detail. A feature of the operation of a UPS in a personal computer is that the current consumed from the UPS depends on the operation currently being performed, i.e. changes abruptly. Let, for example, at a given moment in time the current load in the +12V channel increase abruptly. An increase in current through the inductor winding connected in the +12V channel causes an increase in the magnetic flux in the inductor core. A change in the magnetic flux, in turn, induces an EMF in all other windings of the inductor, the polarity of which (due to the in-phase winding of the inductor windings) in all channels turns out to be turned on counter to the output voltages of the rectifiers. Therefore, the output voltages of all channels (including the +5 V channel) decrease. The feedback signal from the +5 V channel is galvanically transmitted to the PWM circuit, which increases the duration of the output control pulses. Therefore, the output voltages of all UPS channels increase, returning to the nominal value. When the current load changes in other channels, the circuit operates similarly. However, the stabilization coefficient of output voltages in all channels except the +5V channel is low, i.e. stabilization of voltages +12V, -12V and -5V will be worse than in the +5V channel, which is directly “monitored”. This method of complete group stabilization is used, for example, in the KYP-150W UPS (Fig. 27). There are options for switching power supplies with incomplete group stabilization, such as LPS-02-150ХТ. In the circuit of this UPS, only three output voltages (+5V, +12V and -12V) are “connected” through a group stabilization choke. The -5V voltage is stabilized in a different way - using a linear integrated stabilizer type 7905 (Fig. 28). The communication choke in this case is made of three windings. The mechanism for using a group stabilization choke is used in the vast majority of cases, but occasionally there are UPSs in which this mechanism is not used. In such UPSs, at the output of the -5V and -12V generation channel there are voltage stabilizers of the type 7905 and 7912 (much less often - 7805 and 7812), and feedback to the IC1 microcircuit at pin 1 is provided through a resistive divider-sensor from the output voltages +5V and +12V (Fig. 32). The feedback signal in this case is total, because its level is determined by the voltage levels on both buses, and therefore both output voltages (+5V and +12V) are stabilized by the PWM method. And finally, there are UPS variants in which the -5V voltage is obtained from -12V using an integral stabilizer, and the -12V voltage itself is not stabilized at all. In the last two types of circuits, there is no multi-winding inductor for interchannel communication. Stabilization circuits may also differ in the way the feedback signal and reference voltage are supplied to the inputs of the error amplifier DA3. At the same time, adjustments can be installed in these circuits, allowing you to change the output voltage levels of the UPS when setting it up. Since the voltage error amplifier DA3 is a differential amplifier, i.e. amplifies the difference between the signals supplied to its inputs 1 and 2, then the adjustment can be in the circuit of both one and the other input. In this case, the non-inverting input DA3 (pin 1 of the chip) is always used to supply a feedback signal, and the inverting input (pin 2 of the chip) is always used to supply the reference voltage. This is explained by the fact that for normal operation of the control loop, the output voltage of the error amplifier DA3 must change in phase with the feedback signal. The output voltages of the block can be adjusted in two ways: • by changing the level of the feedback signal while maintaining a constant reference voltage at pin 2; • by changing the level of the reference voltage at pin 2 while maintaining a constant level of the feedback signal at input 1. The first of these cases is illustrated in Fig. 32, and the second - Fig. 33.
Figure 32. Adjusting the output voltage level of the PS-200B UPS.
Figure 33. Adjusting the output voltage level of the LPS-02-150XT UPS.
Figure 34. Adjusting the output voltage level of the Appis UPS.
Figure 35. Adjusting the output voltage level of the GT-200W UPS.
However, the most common case is when there is no adjustment to influence the output voltages of the unit. In this case, the voltage at any of inputs 1 or 2 is selected arbitrarily in the range from +2.5 to +5 V, and the voltage at the remaining input is selected using a high-impedance shunt resistor so that the unit produces the output voltages specified in the passport at the nominal load mode. Rice. 35 illustrates the case of selecting the reference voltage level, Fig. 34 - shows the case of selecting the level of the feedback signal. It was previously noted that the instability of the output voltage under the influence of any destabilizing factors (changes in load current, supply voltage and ambient temperature) could be reduced by increasing the gain of the feedback circuit (gain of amplifier DA3). However, the maximum value of the gain DA3 is limited by the stability condition. Since both the UPS and the load contain reactive elements (inductance or capacitance) that accumulate energy, energy is redistributed between these elements in transient modes. This circumstance may lead to the fact that, with certain parameters of the elements, the transient process of establishing the output voltages of the UPS will take on the character of undamped oscillations, or the amount of overregulation in the transient mode will reach unacceptable values.
Figure 36. Transient processes (oscillatory and aperiodic) of the UPS output voltage with an abrupt change in the load current (a) and input voltage (b).
In Fig. Figure 36 shows the transient processes of the output voltage with an abrupt change in the load current and input voltage. The UPS operates stably if the output voltage returns to its steady value after the disturbance that brought it out of its original state ceases (Fig. 37a).
Figure 37. UPS output voltage transients in stable (a) and unstable (b) systems.
If this condition is not met, then the system is unstable (Fig. 37.6). Ensuring the stability of a switching power supply is a necessary condition for its normal functioning. The transient process, depending on the UPS parameters, is oscillatory or aperiodic in nature, while the UPS output voltage has a certain overshoot value and transient process time. The deviation of the output voltage from the nominal value is detected in the measuring element of the feedback circuit (in the UPS under consideration, a resistive divider connected to the +5V output voltage bus is used as a measuring element). Due to the inertia of the control loop, the nominal value of the output voltage is set with a certain delay. In this case, the control circuit by inertia will continue to act in the same direction for some time. As a result, overshoot occurs, i.e. deviation of the output voltage from its nominal value in the direction opposite to the original deviation. The control circuit again changes the output voltage in the opposite direction, etc. In order to ensure the stability of the UPS output voltage regulation loop with a minimum duration of the transient process, the amplitude-frequency characteristic of the error amplifier DA3 is subject to correction. This is done using RC circuits connected as negative feedback circuits surrounding the DA3 amplifier. Examples of such corrective chains are shown in Fig. 38.
Figure 38. Examples of configuration of correcting RC chains for the voltage error amplifier DA3.
To reduce the level of noise generation, aperiodic RC circuits are installed on the secondary side of the switching power supply. Let's take a closer look at the principle of their operation. The transient process of the current through the rectifier diodes at the moments of switching occurs in the form of shock excitation (Fig. 39, a).
Figure 39. Voltage timing diagrams on the reverse resistance recovery diode: a) - without an RC circuit; b) - in the presence of an RC chain.
This process creates electromagnetic interference with a frequency of tens of megahertz. Through the interwinding capacitances of the transformer and the interturn capacitances of the smoothing filter choke, these noises penetrate into the primary network and to the output of the UPS. To reduce this interference, it is necessary to change the nature of the transient process in the region of the reverse current of the rectifier diodes so that it is aperiodic in nature. The advantage of an aperiodic transient process over an oscillatory one is that the amplitude of the initial surge is reduced due to the charge of the capacitor of the RC circuit, as well as its faster attenuation due to the resistor of this circuit, which reduces the quality factor of the parasitic oscillatory circuit. An effective method for ensuring the aperiodic nature of the transient process is to connect an RC circuit in parallel with the transformer windings and rectifier diodes, as shown in Fig. 30. When using an RC circuit, the transient process of changing the current through the diode in the mode of restoring its reverse resistance has the form shown in Fig. 39.6.
CONTENTS OF A CYCLE OF ARTICLES ON SWITCH POWER SUPPLY SUPPLY:
| BASIC PARAMETERS OF SWITCH POWER SUPPLY FOR IBM | The main parameters of switching power supplies are considered, the connector pinout is given, the principle of operation on mains voltage is 110 and 220 volts, |
| MANAGING POWER SWITCHES OF A SWITCHING POWER SUPPLY USING TL494 | The TL494 microcircuit, switching circuit and use cases for controlling power switches of switching power supplies are described in detail. |
| MANAGING POWER SWITCHES OF A SWITCHING POWER SUPPLY USING TL494 | The main methods for controlling the basic circuits of power transistors in switching power supplies and options for constructing secondary power rectifiers are described. |
| STABILIZATION OF OUTPUT VOLTAGES OF PULSE POWER UNITS | Options for using error amplifiers TL494 to stabilize output voltages are described, and the operating principle of a group stabilization choke is described. |
| PROTECTION SCHEMES | Several options for constructing systems for protecting pulsed power supplies from overload are described. |
| "SLOW START" SCHEME | The principles of forming a soft start and generating POWER GOOD voltage are described |
| EXAMPLE OF CONSTRUCTION OF ONE OF THE PULSE POWER SUPPLY SUPPLY | A complete description of the circuit diagram and its operation of a switching power supply |
Site administration address
Switching power supply
Making a switching power supply is not difficult. This is a high-power unit with small dimensions. Using a pulse circuit it is possible to obtain power of several thousand watts.
The peculiarity of these blocks is high frequencies with small turns in the windings, resulting in high voltage. The main thing is transformer winding. The initial winding should be two hundred turns.
Then you need to put insulation and wind ten more turns. You need to make an output winding on top. In old mobile phones you can find a core for a transformer. Glue the two parts of the core with tape and assemble the transformer.
Laboratory power supply
The laboratory power supply circuit contains an LM324 chip. It includes four amplifiers. The laboratory unit is a power source with the highest precision output signal.
It is small, but with great efficiency. This unit must have a large body. It is necessary to select a radiator for the size of the case and a transformer. You will also need capacitors and a shunt.
The unit diagram includes:
- Converter;
- Trigger mechanism;
- Various components.
The basis of the power supply is ir2153. The circuit contains an intensity stabilizer to power the entire circuit. The trigger mechanism is a complex device in this block. The device operates in linear mode and provides smooth adjustment of current and voltage.
In this circuit it is necessary to use several stabilizers. One accepts a voltage of no more than thirty volts, and the second is more powerful.
They do not heat up during operation. The amplifier is powered by a stronger stabilizer. The reference voltage is supplied via an operational amplifier.
Instability of the right half-plane
In topologies where the output inductor operates with continuous current through the diode—such as boost, buck-boost, flyback, and forward converters—the diode conduction time adds delay to the feedback loop. This is because when the load increases sharply, the duty cycle must be temporarily increased to transfer more energy to the inductor. However, a long duty cycle causes the diode's on-off time (tOFF) to decrease, so that the average current through the diode during tOFF actually decreases (Figure 9, right). As output current flows through the diode, this current also decreases. This condition persists until the average inductor current slowly increases and the diode current reaches the set value.
Rice. 9. Right half-plane phenomenon
This phenomenon, where the current through a diode must first decrease before it increases, is known as Right Half Plane instability or RHP instability because the output current is temporarily out of phase with the duty cycle. For example, in a simple boost converter (Fig. 10), the frequency of the temporary additional zero is in accordance with the expression:
Rice. 10. Boost switching stabilizer, simplified circuit
RHP instability is almost impossible to compensate, since this zero also changes with the load current. The solution is to select feedback loop parameters with a cutoff frequency significantly lower than the lowest frequency of RHP zeros (this has a certain disadvantage, since it leads to a deterioration in the response time of the DC/DC converter to step changes in the load). In order to eliminate this problem altogether, it is necessary to use a buck-boost converter in discontinuous current mode (DCM mode).