В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.
Размер фрезерного станка с ЧПУ
Размер фрезерных станков с ЧПУ играет жизненно важную роль при выборе двигателя.
Если вы хотите настроить фрезерный станок с ЧПУ с небольшой площадью основания и небольшой рабочей зоной, шаговый двигатель может быть лучше, чем сервопривод.
Как правило, шаговые двигатели используются для привода компонентов линейного перемещения, таких как ременный привод, ходовой винт и шариковый винт фрезерных станков с ЧПУ с максимальной площадью резания 4 х 4 фута.
Некоторые промышленные фрезерные станки с ЧПУ начального уровня с площадью резания 4 x 8 футов и 5 футов x 10 футов также используют шаговые двигатели, что помогает снизить стоимость.
В больших фрезерных станках с ЧПУ размер порталов велик и склонен к изгибу, для предотвращения изгиба используется более тяжелая конструкция.
В таких случаях серводвигатель является более подходящим выбором.
Серводвигатели
Еще одним фактором является размер самого двигателя. Из-за сложной конструкции серводвигатели крупнее и тяжелее шаговых двигателей.
Это означает, что для небольших приложений с ЧПУ степперы являются лучшим выбором.
Альтернативный способ выбора
Некоторые производители при выборе предлагают отталкиваться от мощности двигателей, требуемых для станка. Для этого предлагается рассчитать коэффициент К по эмпирической формуле К = М * S / 58000, где М — масса движимой части(портала со шпинделем), S — требуемая скорость перемещения (мм/мин). Если К < 1, вам скорее всего подойдут шаговые двигатели. Если К > 2, ваш выбор серводвигатели. Если К лежит в пределах от 1 до 2, Вам могут подойти оба вида привода и Вам стоит ввести дополнительные критерии выбора для определения лучшего варианта.
Управление двигателем
Шаговые двигатели перемещаются на заданное количество шагов с каждым импульсом, и контроллер не может узнать, двигался ли двигатель.
Принимая во внимание, что серводвигатель имеет замкнутый контур управления, что означает, что двигатель отправляет информацию о своем положении и направлении обратно в контроллер.
Таким образом, контроллер может проверить, не произошла ли какая-либо ошибка. Это может иметь решающее значение при работе с дорогостоящими заготовками.
Например, предположим, что вы делаете 2-дюймовый пропил на дорогостоящей заготовке, и что-то заклинило ваши линейные приводы или портал.
Если вы используете шаговые двигатели, двигатель пропустит несколько шагов и продолжит резку, а поскольку он пропустил шаги, он остановится и не будет резать до 2 дюймов.
Вам придется выбросить заготовку (или перепрофилировать ее) и начать с новой.
Принимая во внимание, что если вы используете сервоприводы, контроллер знает, как далеко на самом деле переместилась ось, и будет продолжать движение, пока не завершит весь разрез.
Что ж, это также означает, что контроллер для серводвигателя сложнее и дороже, чем контроллер для шагового двигателя.
Другой вариант достижения хороших результатов при низких затратах — использование шаговых двигателей с обратной связью.
Эти двигатели не такие дорогие, как серводвигатели, и обладают всеми характеристиками шагового двигателя с дополнительным преимуществом предотвращения ошибок.
Например, ToAUTO имеет шаговый двигатель NEMA 23 с обратной связью. Он имеет датчики положения, которые обеспечивают обратную связь для коррекции положения.
Так что, если вы хотите делать точные разрезы на заготовках для приложений, где любая ошибка может иметь катастрофические последствия, серводвигатели идеальны.
Однако программирование сервопривода сложнее, чем программирование шагового двигателя, что делает шаговые двигатели лучшим выбором для начинающих.
Шаговый двигатель с контроллером
Подведем итоги
Серводвигатели предлагают неоспоримое преимущество в производительности. Однако с точки зрения стабильности позиционирования шаговые двигатели могут быть весьма конкурентоспособными. Эта точка зрения приводит к распространенному заблуждению о шаговых двигателях, которое является мифом о «потерянном шаге». Как мы уже обсуждали ранее, массово-пружинный характер нагрузки шагового двигателя может привести к нескольким потерянным шагам. Привод дает команду движению шагового механизма в определенный угол, однако потерянные шаги не переносятся от вращения к вращению. Все зависит от необходимого уровня точности позиционирования.
Вышеприведенное обсуждение подводит нас к окончательному и ключевому различию между шаговыми электродвигателями и сервоприводами — стоимости. Шаговые двигатели обычно не требуют обратной связи, они используют менее дорогие магниты и редко содержат редуктора. Из-за большого количества полюсов и их способности генерировать удерживающий момент они потребляют меньше энергии при нулевой скорости. В результате шаговый двигатель может быть на порядок дешевле, чем аналогичный серводвигатель.
Подводя итог, можно сказать, что шаговые двигатели являются хорошим решением для механизмов с малой скоростью вращения, небольшим ускорением и малыми требованиями к точности. Шаговые двигатели также имеют тенденцию быть компактными и недорогими. Это делает эти машины подходящими для применения в медицине, биотехнологиях, безопасности и обороне, а также в производстве полупроводников. Серводвигатели — лучший выбор для систем, требующих высокой скорости, высокого ускорения и большой точности. Компромисс — более высокая стоимость и сложность. Серводвигатели обычно используются в упаковке, конвертации, плетении сетей и аналогичных приложениях.
Если ваши требования не слишком критичны, а бюджет ограничен, рассмотрите шаговый двигатель. Если производительность является наиболее важным аспектом, серводвигатель выполнит свою работу, но будьте готовы заплатить больше.
Скорость и крутящий момент
Шаговые двигатели эффективно работают при 1200 об/мин или ниже и могут создавать высокий крутящий момент на низких скоростях.
Вы можете найти шаговые двигатели с удерживающим моментом, как правило, от 30 до 1500 унций на дюйм.
Но этот крутящий момент уменьшается по мере увеличения скорости двигателя, иногда до 80% при очень высоких оборотах.
Серводвигатели работают со скоростью более 2000 об/мин и доступны с гораздо более высоким номинальным крутящим моментом, чем шаговые двигатели, что делает их быстрее, чем шаговые двигатели.
Самое замечательное в серводвигателях то, что они способны обеспечивать постоянный крутящий момент во всем диапазоне скоростей.
Понятно, что сервоприводы имеют лучшие характеристики крутящего момента по сравнению с шаговыми двигателями, поэтому, если вы хотите использовать действительно тяжелые шпиндели, вам могут понадобиться сервоприводы.
Кроме того, если вы используете тяжелые порталы вместе с тяжелым шпинделем, вам следует рассмотреть возможность использования сервоприводов для увеличения скорости.
Кроме того, сервоприводы лучше работают при динамических нагрузках.
Это означает, что сервоприводы стабильно работают с разными материалами и настройками резки, поскольку они падают под разными нагрузками.
Но это не означает, что шаговые двигатели всегда являются плохим выбором для больших ЧПУ.
Шаговый двигатель NEMA 34 может работать со шпинделем мощностью 7 л.с. на фрезерном станке с ЧПУ из алюминия и стали и при этом достигать высокой скорости около 1000 дюймов в минуту.
Крутящий момент. Шаговые двигатели и серводвигатели
Еще одно существенное различие между ними — время, затрачиваемое на нарезку. Двигатели не могут мгновенно достичь полной скорости, им требуется время, чтобы разогнаться до полной скорости и остановиться.
Когда дело доходит до ускорения и торможения, сервоприводы быстрее на несколько миллисекунд по сравнению с шаговыми двигателями.
Несколько миллисекунд не будут иметь значения, если вы изготавливаете детали с быстрым циклом и с минимальным количеством изменений направления резки.
Но когда вы изготавливаете детали, для которых шпиндель должен часто менять направление, двигатели должны останавливаться, а затем ускоряться в новом направлении.
В таких случаях эти миллисекунды складываются, и существует значительная разница во времени выполнения проекта между сервоприводами и шаговыми двигателями.
Вывод таков: если вы работаете в производственной среде, где скорость производства имеет большое значение, вам следует использовать сервоприводы.
Синхронные двигатели
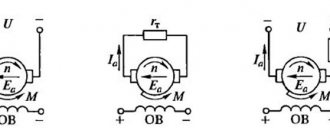
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
Удержание крутящего момента
Удерживающий момент определяет способность вала двигателя оставаться на месте, когда катушки находятся под напряжением.
Шаговый двигатель не будет вращаться без входного сигнала, пока крутящий момент на валу двигателя меньше удерживающего момента двигателя.
Принимая во внимание, что в серводвигателе удерживающий момент практически отсутствует. Так как же серводвигатель удерживает нагрузку на месте?
Механизм обратной связи в серводвигателе обнаруживает любое изменение положения вала и мгновенно корректирует положение вала. Он в основном колеблется в удерживаемом положении, но колебания незначительны.
Но когда сервоприводы настроены неправильно, они производят вибрации и шум при удержании груза в стационарном положении.
Удерживающий момент является основным фактором, когда вам нужно удерживать груз в вертикальном направлении, например, в случае шпинделя на оси Z.
Это особенно важно, когда вы используете шарико-винтовые пары для линейного перемещения.
Внутреннее трение в шарико-винтовых передачах низкое, и они могут иметь обратный привод.
Это означает, что если вы используете шариковый винт на оси Z и поднимаете шпиндель вверх, вес шпинделя может опустить шариковый винт вниз.
Чтобы предотвратить это, двигатель, соединенный с компонентом линейного перемещения, должен иметь достаточный удерживающий момент, чтобы предотвратить обратное движение нагрузки компонентов линейного перемещения.
Использование шагового двигателя с достаточным удерживающим моментом — простой и легкий способ добиться этого.
Сервоприводы могут выполнять такую же хорошую работу, но вам потребуется тщательно настроить контроллер, чтобы предотвратить ненужные вибрации и шум, которые могут повредить другие компоненты вашей сборки.
Шаговый двигатель с шариковым винтом
Входная мощность и эффективность
Шаговые двигатели работают от постоянного тока и обычно работают на полную мощность независимо от нагрузки. Шаговые двигатели имеют КПД около 70%.
С другой стороны, вы можете найти сервоприводы, которые работают от источника переменного или постоянного тока, и они потребляют мощность, пропорциональную нагрузке, которую они несут, поэтому сервоприводы могут давать 80-90% эффективности.
Энергопотребление — это фактор, который следует учитывать, когда вы работаете в производственной среде, и дополнительные деньги, которые вы тратите на сервоприводы, могут сэкономить вам деньги на счетах за электроэнергию.
Однако, если объемы вашего производства невелики, а нагрузки меньше, инвестиции в сервопривод не имеют реальной экономической выгоды, что делает шаговые двигатели лучшим выбором.
Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Пройти тест
Точность и воспроизводимость
Разрешение двигателей с ЧПУ является фактором, влияющим на точность и повторяемость фрезерных станков с ЧПУ.
Как правило, разрешение шаговых двигателей зависит от количества шагов.
Типичный шаговый двигатель имеет 200 шагов, что означает, что он поворачивается на 1,8 градуса за каждый полученный импульс.
Если вы используете микрошаг, вы можете улучшить это разрешение. Например, если вы используете микрошаг 1/8, разрешение станет 0,225 градуса на 200-шаговом двигателе.
Кроме того, шаговые двигатели часто предпочитают из-за их простой конструкции и системы с разомкнутым контуром, которые практически не требуют настройки. Следовательно, они обеспечивают хорошую точность без особой настройки.
С другой стороны, сервоприводы используют энкодер для определения положения вала двигателя, а разрешение двигателя зависит от энкодера и способности контроллера точно регулировать напряжение и ток.
Например, если серводвигатель имеет разрешение 1000 импульсов/об, это показывает, что контроллер сможет определять каждые 0,36 градуса поворота вала двигателя.
Теоретически сервоприводы имеют бесконечное разрешение, но вам необходимо правильно настроить их и поддерживать энкодер и контроллер в хорошем состоянии для достижения очень высокой точности.
Для любительских приложений, где вам не требуется высокая точность и прецизионность, степперы являются вполне разумным выбором.
Однако шаговые двигатели могут пропускать шаги и вызывать ошибочные сокращения, когда они нагреваются из-за непрерывной работы.
Серводвигатели имеют лучшую точность позиционирования, чем шаговые двигатели.
Это связано с тем, что серводвигатели имеют замкнутый контур управления, что позволяет им корректировать свои движения.
Вы также можете получить хорошую повторяемость от серводвигателей, если они повернуты правильно. Их повторяемость также зависит от качества используемого энкодера.
Вращающийся энкодер для определения положения вала
Требования
Сколько рабочих циклов в минуту нужно сделать двигателю? Какой крутящий момент нужен? Какая максимальная скорость требуется?
Эти критические вопросы не могут быть решены просто путем выбора двигателя с заданной мощностью из каталога.
Выходная мощность электрической машины представляет собой комбинацию крутящего момента и скорости, которая может быть рассчитана путем умножения скорости, крутящего момента и констант, вносящих поправки в режим работы электрической машины (естественно это все очень поверхностно. Необходимы точные математические расчеты для каждого типа электродвигателя).
Однако из-за характера этого расчета существует множество различных комбинаций крутящего момента и скорости (кратковременная работа с перегрузкой или недогрузкой), которые влияют на выходную мощность. Таким образом, разные двигатели с одинаковой номинальной мощностью могут работать по-разному из-за комбинации скорости и крутящего момента.
Инженеры должны знать, насколько быстро должен двигаться груз определенного размера, прежде чем уверенно выбирать двигатель, который будет работать лучше. Выполняемая работа также должна попадать в кривую крутящего момента / скорости двигателя. Эта кривая (механическая характеристика электродвигателя) показывает, как крутящий момент двигателя изменяется в зависимости от скорости. Используя предположения «наихудшего случая» (другими словами, определяя максимальный / минимальный крутящий момент и скорость, которые потребуются для работы), инженеры могут быть уверены, что выбранный двигатель имеет механическую характеристику, способную приводить в движение груз при этом не выходить с номинального режима работы (например, перегрев, если мощность электрической машины занижена).
Инерция нагрузки является еще одним фактором, который следует учитывать, прежде чем погрузиться в процесс принятия решения о выборе двигателя. Необходимо рассчитать коэффициент инерции, который представляет собой сравнение инерции нагрузки и инерции двигателя. Одно эмпирическое правило гласит, что если инерция нагрузки в 10 раз превышает инерцию ротора, то настройка электрический машины может быть куда более сложной и производительность производственного механизма может ухудшиться. Но это правило варьируется не только от технологии к технологии, но и от поставщика к поставщику и даже от продукта к продукту. Важность точности позиционирования рабочего органа также повлияет на это решение. Некоторые механизмы поддерживают соотношение 30: 1, в то время как прямые привода работают до 200: 1. Многим инженерам не нравится определять размер двигателя, который превышает соотношение 10 к 1.
Наконец, существуют ли физические ограничения, которые ограничивают тип электродвигателя. Электрические машины бывают разных форм и размеров. В некоторых случаях электродвигатели являются большими и громоздкими, и есть определенные операции, которые не могут вместить двигатель определенного размера. Прежде чем принять обоснованное решение о наилучшем типе машины, ее массогабаритные показатели должны быть оценены и поняты.
Как только инженеры ответят на все эти вопросы — скорость, крутящий момент, мощность, инерция нагрузки и массогабаритные показатели, — они смогут сосредоточиться на наиболее эффективном по размеру двигателе. Однако процесс принятия решений на этом не заканчивается. Инженеры также должны выяснить, какой тип электродвигателя лучше всего подходит для применения. В течение многих лет выбор типа сводился к одному из двух вариантов для большинства применений: серводвигатель или шаговый двигатель с разомкнутым контуром управления.
Шум
Шум может быть проблемой при работе с ЧПУ.
Шаговые двигатели могут быть немного шумными по сравнению с серводвигателями.
Чтобы преодолеть это, вы можете использовать драйверы шаговых двигателей с поддержкой микрошагов, что помогает снизить уровень шума.
Вы можете найти шаговые драйверы, которые могут управлять микрошагом до 1/128, чтобы значительно снизить уровень шума и обеспечить плавное движение вала на низких скоростях.
Кроме того, микрошаг устраняет влияние резонансной частоты, которая вызывает вибрации в шаговых двигателях.
Однако микрошаг может создавать меньший крутящий момент, который может составлять около 70% крутящего момента, создаваемого при полношаговом управлении.
Вы можете использовать серводвигатели для устранения шума и вибраций двигателя, но вам все равно придется беспокоиться о шуме фрезерного станка/шпинделя.
Как правило, шум фрезера/шпинделя перевешивает все остальное, и это делает шум двигателя незначительным.
Срок службы и техническое обслуживание
Шаговые двигатели состоят из меньшего количества компонентов, и подшипник — единственная быстроизнашивающаяся деталь, которую можно заменить.
Серводвигатели используют энкодеры и редукторы в качестве основных компонентов, что делает их механически сложными.
Следовательно, шаговые двигатели требуют меньше обслуживания по сравнению с серводвигателями.
Однако шаговые двигатели более подвержены повреждениям из-за механических ошибок, таких как перегрузка и заедание, чем серводвигатели.
Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Стоимость
Стоимость часто является основной причиной выбора шаговых двигателей, а не сервоприводов.
Типичный сервопривод как минимум в три раза дороже шагового двигателя того же размера и мощности.
Это связано со сложностью его конструкции.
Шаговые двигатели используют систему без обратной связи и имеют простую конструкцию, исключающую сложность и дополнительную стоимость.
Кроме того, контроллеры серводвигателей используют сложные схемы для достижения высокой производительности.
Драйверы шаговых двигателей недороги по сравнению с сервоприводами из-за их простой конструкции и доступности.
В целом дополнительные компоненты и сложная система делают систему серводвигателя дорогостоящей.
Серводвигатель с драйвером
Однако в условиях промышленного производства дополнительные затраты оправдываются более высокой эффективностью системы серводвигателя.
Кроме того, сервоприводы производят детали, которые имеют меньше брака и сокращают потери сырья.
Почему серводвигатели дороже шаговых двигателей?
В серводвигателях используются редкоземельные магниты, которые дороже, чем обычные магниты, используемые в шаговых двигателях. Серводвигатели также имеют энкодер или резольвер и редуктор. Следовательно, общая компоновка делает серводвигатели механически более сложными и более дорогими, чем шаговые двигатели.
Могу ли я самостоятельно заменить энкодер моего серводвигателя?
Самостоятельно заменить энкодер в серводвигателе очень сложно. Для этого требуется найти смещение между энкодером и положением ротора, и лучше всего это может сделать обученный обслуживающий персонал.
Могу ли я добавить внешний энкодер к своим шаговым двигателям?
Вы можете добавить внешние энкодеры к своим шаговым двигателям. Энкодер позволяет отслеживать положение и скорость вала двигателя. Добавление энкодера к шаговому двигателю оказывает значительное влияние на производительность двигателя.
Сервоприводы
В состав сервопривода входят серводвигатель и электронный блок управления (сервоусилитель или сервопреобразователь). В качестве серводвигателей наиболее широко применяют синхронные трехфазные электродвигатели, в которых установлены мощные постоянные магниты для улучшения динамических характеристик. Обязательным компонентом сервопривода также является энкодер. Как правило, он превосходит по своим параметрам обычные энкодеры, поставляемые отдельно. Его разрешение может достигать сотен тысяч импульсов на оборот, за счет чего достигается сверхточное позиционирование. Для примера, разрешение встроенных энкодеров сервоприводов Delta ASD-A2 составляет 1 280 000 имп/об.
Сервоусилитель получает два сигнала управления — сигнал задания скорости (или угла поворота) и сигнал обратной связи с энкодера. В результате сервопривод обеспечивает движение какой-либо механической нагрузки с большой точностью не только по скорости вращения, но и по углу поворота, который может быть выдержан до долей градуса.