Stepper motors and servo drives are used as an electric drive for portals and executive units of CNC milling and engraving machines and equipment for CNC plasma cutting. What is better: a stepper motor or a servo drive, and in what cases the use of one or another electric drive is economically and technically justified, we will consider in this article.
CNC Router Size
The size of CNC routers plays a vital role when choosing a motor.
If you want to set up a CNC router with a small footprint and small work area, a stepper motor may be better than a servo.
Typically, stepper motors are used to drive linear motion components such as the belt drive, lead screw, and ball screw of CNC routers with a maximum cutting area of 4 x 4 feet.
Some entry-level industrial CNC routers with 4' x 8' and 5' x 10' cutting areas also use stepper motors, which helps keep the cost down.
In large CNC routers, the gantry size is large and prone to bending, and a heavier structure is used to prevent bending.
In such cases, a servo motor is a more suitable choice.
Servo motors
Another factor is the size of the engine itself. Due to their complex design, servo motors are larger and heavier than stepper motors.
This means that for small CNC applications, steppers are the best choice.
Alternative selection method
Some manufacturers suggest choosing based on the power of the engines required for the machine. To do this, it is proposed to calculate the coefficient K using the empirical formula K = M * S / 58000, where M is the mass of the moving part (gantry with spindle), S is the required moving speed (mm/min). If K < 1, stepper motors will probably work for you. If K > 2, your choice is servomotors. If K is between 1 and 2, both types of drive may be suitable for you and you should enter additional selection criteria to determine the best option.
Engine control
Stepper motors move a set number of steps with each pulse, and the controller has no way of knowing whether the motor has moved.
Whereas, a servo motor has a closed loop control, which means the motor sends information about its position and direction back to the controller.
This way the controller can check if any error has occurred. This can be crucial when working with expensive workpieces.
For example, let's say you're making a 2-inch cut on an expensive piece of work and something jams your linear actuators or gantry.
If you are using stepper motors, the motor will skip a few steps and continue cutting, and because it skipped steps, it will stop and not cut until 2 inches.
You'll have to throw away the workpiece (or repurpose it) and start over.
Whereas if you use servos, the controller knows how far the axis has actually moved and will continue to move until it completes the entire cut.
Well, this also means that a servo motor controller is more complex and expensive than a stepper motor controller.
Another option to achieve good results at low cost is to use stepper motors with feedback.
These motors are not as expensive as servo motors and have all the characteristics of a stepper motor with the added benefit of preventing errors.
For example, ToAUTO has a NEMA 23 stepper motor with feedback. It has position sensors that provide feedback for position correction.
So if you want to make precise cuts on workpieces for applications where any mistake could have catastrophic consequences, servo motors are ideal.
However, programming a servo is more difficult than programming a stepper motor, making stepper motors a better choice for beginners.
Stepper motor with controller
Let's sum it up
Servo motors offer an undeniable performance advantage. However, in terms of positioning stability, stepper motors can be very competitive. This view leads to a common misconception about stepper motors, which is the "lost step" myth. As we discussed earlier, the mass-spring nature of stepper motor loading can result in several lost steps. The drive commands the stepper to move to a specific angle, but lost steps are not carried over from rotation to rotation. It all depends on the required level of positioning accuracy.
The above discussion brings us to the final and key difference between stepper motors and servos - cost. Stepper motors usually do not require feedback, they use less expensive magnets and rarely contain gearboxes. Due to the large number of poles and their ability to generate holding torque, they consume less power at zero speed. As a result, a stepper motor can be orders of magnitude cheaper than a similar servo motor.
To summarize, stepper motors are a good solution for low speed, low acceleration and low precision applications. Stepper motors also tend to be compact and inexpensive. This makes these machines suitable for applications in medical, biotechnology, security and defense, and semiconductor manufacturing. Servo motors are the best choice for applications that require high speed, high acceleration and high precision. The trade-off is higher cost and complexity. Servo motors are commonly used in packaging, converting, netting and similar applications.
If your requirements are not too critical and your budget is limited, consider a stepper motor. If performance is the most important aspect, a servo motor will get the job done, but be prepared to pay more.
Speed and torque
Stepper motors operate efficiently at 1200 rpm or lower and can produce high torque at low speeds.
You can find stepper motors with holding torque typically ranging from 30 to 1500 oz./in.
But this torque decreases as engine speed increases, sometimes by up to 80% at very high speeds.
Servo motors operate at over 2000 RPM and are available with much higher torque ratings than stepper motors, making them faster than stepper motors.
The great thing about servo motors is that they are capable of delivering constant torque throughout the entire speed range.
It is clear that servos have better torque characteristics compared to stepper motors, so if you want to use really heavy spindles, you may need servos.
Additionally, if you are using heavy gantry units along with a heavy spindle, you should consider using servos to increase speed.
In addition, servos perform better under dynamic loads.
This means that the servos operate consistently across different materials and cutting settings as they are subjected to different loads.
But that doesn't mean stepper motors are always a bad choice for large CNCs.
The NEMA 34 stepper motor can drive a 7 HP spindle. on a CNC router from aluminum and steel and still achieve high speeds of approximately 1000 inches per minute.
Torque. Stepper motors and servo motors
Another significant difference between the two is the time spent cutting. Engines cannot reach full speed instantly, they take time to accelerate to full speed and stop.
When it comes to acceleration and braking, servos are faster by a few milliseconds compared to stepper motors.
A few milliseconds won't matter if you're producing parts with fast cycle times and minimal changes in cutting direction.
But when you make parts that require the spindle to change direction frequently, the motors must stop and then accelerate in the new direction.
In such cases, those milliseconds add up and there is a significant difference in project completion time between servos and stepper motors.
The bottom line is that if you work in a manufacturing environment where production speed is of the essence, you should use servos.
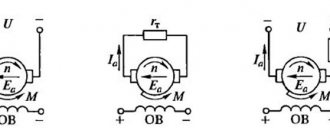
Synchronous motors
A synchronous motor has no fundamental design differences from asynchronous motors. A three-phase winding is placed on the stator of a synchronous motor, when connected to a three-phase alternating current network, a rotating magnetic field will be created, the number of revolutions per minute of which is n = 60f/p, where f is the frequency of the drive supply voltage. An excitation winding is placed on the motor rotor, which is connected to the DC source network. Or the rotor is made of a permanent magnet. The excitation current creates the magnetic flux of the poles or in the case of a permanent magnet, the magnetic flux has already been created. The rotating magnetic field produced by the stator winding currents drags the rotor poles along with it. In this case, the rotor can only rotate at synchronous speed, i.e. at a speed equal to the rotation speed of the stator field. Thus, the speed of a synchronous motor is strictly constant if the frequency of the supply network current remains unchanged.
The advantage of synchronous motors is that they are less sensitive to changes in supply voltage than asynchronous motors. For synchronous motors, the torque is proportional to the network voltage to the first power, while for asynchronous motors it is proportional to the square of the voltage. The torque of a synchronous motor is created as a result of the interaction of the magnetic field of the stator with the magnetic field of the poles. Only the magnetic flux of the stator field depends on the supply voltage.
Torque Hold
Holding torque determines the ability of the motor shaft to remain in place when the coils are energized.
A stepper motor will not rotate without an input signal as long as the motor shaft torque is less than the motor holding torque.
Whereas in a servo motor there is almost no holding torque. So how does a servo motor hold the load in place?
The feedback mechanism in the servo motor detects any change in the shaft position and instantly corrects the shaft position. It mostly oscillates in the held position, but the oscillation is minor.
But when servos are not adjusted correctly, they produce vibration and noise while holding the load in a stationary position.
Holding torque is a major factor when you need to hold a load in a vertical direction, such as in the case of a Z-axis spindle.
This is especially important when you are using ball screws for linear motion.
Ball screws have low internal friction and can be reverse driven.
This means that if you use a ballscrew on the Z axis and lift the spindle up, the weight of the spindle can push the ballscrew down.
To prevent this, the motor connected to the linear motion component must have sufficient holding torque to prevent the linear motion components load from moving backwards.
Using a stepper motor with sufficient holding torque is a simple and easy way to achieve this.
Servos can do just as good a job, but you'll need to carefully tune the controller to prevent unnecessary vibration and noise that could damage other components in your build.
Stepper motor with ball screw
Input Power and Efficiency
Stepper motors operate on DC current and typically run at full power regardless of load. Stepper motors have an efficiency of about 70%.
On the other hand, you can find servos that operate from an AC or DC source, and they draw power proportional to the load they carry, so servos can be 80-90% efficient.
Energy consumption is a factor to consider when you're working in a production environment, and the extra money you spend on servos can save you money on your energy bills.
However, if your production volumes are small and loads are smaller, there is no real cost benefit to investing in a servo drive, making stepper motors a better choice.
Operating principle of servo drive
The control device, in accordance with a given program, supplies voltage to the servo drive, which is connected to the machine portal. The engine moves the working element. In this case, the encoder generates pulses sent to the controller. Their number is counted by the control device. The number of pulses is proportional to the movement of the portal. When the working element reaches the specified position, the electric motor stops receiving voltage. The portal is fixed. Until the number of pulses recorded by the controller from the sensor reaches the programmed value, the engine will move the working element.
A stepper servo can also be configured to maintain a constant speed regardless of load or constant torque at different speeds.
The advantages of servos include positioning accuracy, acceleration dynamics and the absence of torque reduction at high speeds. The use of a servo drive is usually limited by its rather high cost.
Take the test
Accuracy and repeatability
The resolution of CNC motors is a factor that affects the accuracy and repeatability of CNC routers.
Typically, the resolution of stepper motors depends on the number of steps.
A typical stepper motor has 200 steps, which means it turns 1.8 degrees for every pulse it receives.
If you use microstepping you can improve this resolution. For example, if you use 1/8 microstepping, the resolution will become 0.225 degrees on a 200-step motor.
Additionally, stepper motors are often preferred due to their simple design and open-loop system that require little to no tuning. Hence, they provide good accuracy without much adjustment.
On the other hand, servos use an encoder to determine the position of the motor shaft, and the resolution of the motor depends on the encoder and the controller's ability to accurately regulate voltage and current.
For example, if the servo motor has a resolution of 1000 pulses/rev, this indicates that the controller will be able to detect every 0.36 degrees of rotation of the motor shaft.
In theory, servos have infinite resolution, but you need to set them up correctly and keep the encoder and controller in good condition to achieve very high precision.
For hobbyist applications where you don't need high precision and accuracy, steppers are a reasonable choice.
However, stepper motors can skip steps and cause erroneous cuts when they get hot due to continuous operation.
Servo motors have better positioning accuracy than stepper motors.
This is because servo motors have a closed control loop, which allows them to adjust their movements.
You can also get good repeatability from servos if they are rotated correctly. Their repeatability also depends on the quality of the encoder used.
Rotary encoder for determining shaft position
Requirements
How many cycles per minute does the engine need to make? How much torque is needed? What is the maximum speed required?
These critical issues cannot be resolved simply by selecting an engine with a given power from a catalog.
The power output of an electric machine is a combination of torque and speed, which can be calculated by multiplying the speed, torque and constants that adjust the operating mode of the electric machine (of course this is all very superficial. Accurate mathematical calculations are required for each type of electric motor).
However, due to the nature of this calculation, there are many different combinations of torque and speed (short-term overload or underload operation) that affect power output. Thus, different motors with the same power rating may perform differently due to the combination of speed and torque.
Engineers need to know how fast a load of a certain size needs to move before confidently selecting the motor that will perform best. The work performed must also fall within the motor's torque/speed curve. This curve (the mechanical characteristic of an electric motor) shows how the motor torque changes with speed. By using "worst-case" assumptions (in other words, determining the maximum/minimum torque and speed that the job will require), engineers can be confident that the selected motor has the mechanical capability to drive the load while remaining within rated operating conditions. (for example, overheating if the power of the electric machine is underestimated).
Load inertia is another factor to consider before diving into the motor selection decision process. It is necessary to calculate the inertia coefficient, which is a comparison of the load inertia and the motor inertia. One rule of thumb is that if the load inertia is 10 times the rotor inertia, then tuning the electrical machine can be much more difficult and the performance of the production machine can deteriorate. But this rule varies not only from technology to technology, but also from supplier to supplier and even from product to product. The importance of accurate positioning of the end effector will also influence this decision. Some mechanisms support a 30:1 ratio, while direct drives operate up to 200:1. Many engineers do not like to size a motor that exceeds a 10:1 ratio.
Finally, are there physical limitations that limit the type of electric motor. Electric machines come in different shapes and sizes. In some cases, electric motors are large and bulky, and there are certain operations that a certain size motor cannot accommodate. Before making an informed decision about the best type of machine, its weight and dimensions must be assessed and understood.
Once engineers answer all these questions—speed, torque, power, load inertia, and weight/size—they can focus on the most efficient engine size. However, the decision-making process does not end there. Engineers must also figure out which type of electric motor is best suited for the application. For many years, the choice of type came down to one of two options for most applications: servo motor or open-loop stepper motor.
Noise
Noise can be a problem when working with CNC.
Stepper motors can be a little noisy compared to servo motors.
To overcome this, you can use stepper motor drivers that support microstepping, which helps reduce noise.
You can find stepper drivers that can control microstepping down to 1/128 to greatly reduce noise and keep the shaft moving smoothly at low speeds.
In addition, microstepping eliminates the influence of resonant frequency, which causes vibration in stepper motors.
However, microstepping can produce less torque, which can be about 70% of the torque produced by full-stepping control.
You can use servo motors to eliminate motor noise and vibration, but you will still have to worry about milling machine/spindle noise.
Typically, the router/spindle noise outweighs everything else, making the motor noise negligible.
Service life and maintenance
Stepper motors have fewer components, and the bearing is the only wear part that can be replaced.
Servo motors use encoders and gearboxes as core components, making them mechanically complex.
Hence, stepper motors require less maintenance compared to servo motors.
However, stepper motors are more susceptible to damage due to mechanical errors such as overload and jamming than servo motors.
Stepper drive device
The stepper drive consists of a synchronous electric machine and a control controller. The latter ensures the supply of control signals to the motor windings and their alternating activation in accordance with a given program.
A stepper motor is an electrical machine that converts control signals into moving a shaft to a certain angle and fixing it in a given position. The number of steps of such electric motors ranges from 100 to 400, the step angle is from 0.9-3.6°.
Price
Cost is often the main reason for choosing stepper motors over servos.
A typical servo drive is at least three times more expensive than a stepper motor of the same size and power.
This is due to the complexity of its design.
Stepper motors use an open-loop system and have a simple design that eliminates complexity and added cost.
Additionally, servo motor controllers use complex circuitry to achieve high performance.
Stepper motor drivers are inexpensive compared to servos due to their simple design and availability.
Overall, the additional components and complex system make the servo motor system expensive.
Servo motor with driver
However, in an industrial production environment, the additional cost is justified by the higher efficiency of the servo motor system.
In addition, servo drives produce parts that have less waste and reduce wastage of raw materials.
Why are servo motors more expensive than stepper motors?
Servo motors use rare earth magnets, which are more expensive than the regular magnets used in stepper motors. Servo motors also have an encoder or resolver and a gearbox. Consequently, the overall layout makes servo motors mechanically more complex and more expensive than stepper motors.
Can I replace my servo motor encoder myself?
It is very difficult to replace the encoder in a servomotor yourself. This requires finding the offset between the encoder and the rotor position and is best done by trained service personnel.
Can I add an external encoder to my stepper motors?
You can add external encoders to your stepper motors. The encoder allows you to monitor the position and speed of the motor shaft. Adding an encoder to a stepper motor has a significant impact on the motor's performance.
Servo drives
The servo drive consists of a servo motor and an electronic control unit (servo amplifier or servo converter). The most widely used servo motors are synchronous three-phase electric motors, in which powerful permanent magnets are installed to improve dynamic characteristics. An encoder is also a mandatory component of the servo drive. As a rule, it outperforms conventional encoders supplied separately. Its resolution can reach hundreds of thousands of pulses per revolution, due to which ultra-precise positioning is achieved. For example, the resolution of the built-in encoders of Delta ASD-A2 servo drives is 1,280,000 pulses/rev.
The servo amplifier receives two control signals - a speed (or angle of rotation) command signal and a feedback signal from the encoder. As a result, the servo drive ensures the movement of any mechanical load with great accuracy not only in terms of rotation speed, but also in the angle of rotation, which can be maintained to fractions of a degree.