Электрические машины › Электрические машины постоянного тока
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iвне зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
§5.6. Двигатели постоянного тока. Основные характеристики
В цепь якоря может быть включено добавочное сопротивление Rд, например пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения может быть включен регулировочный реостат Rр. У двигателя параллельного возбуждения обмотки якоря и возбуждения подключены к одному источнику питания, и напряжение на них одинаковое. Следовательно, двигатель параллельного возбуждения можно рассматривать как двигатель независимого возбуждения при Uя= Uв.
Механические характеристики. Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной. Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
U я=E я+I я)(R я+R д), (5.35)
где R я – активное сопротивление якоря. Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
ω=(U я-I я(R я+R д))/kФ. (5.36)
В соответствии с (5.10) ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
ω=Uя/ kФ – ( R я+ R д)/( kФ) 2)Mэм. . (5.37)
Это уравнение можно представить в виде ω= ω о.ид.- Δ ω, где
ω о.ид.=Uя/kФ (5.38)
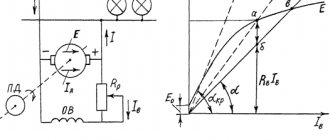
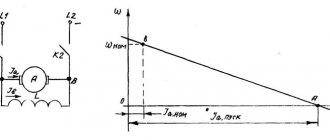
ω о.ид — угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм. [(Rя+Rд)/(kФ)2]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи. Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на .
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности. Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм.
Iя= (Uя-Eя)/(R я+ R д)=(Uя -kωФ;)/( R я R д ), (5.39)
возрастает. Соответственно растет электромагнитный момент вплоть до нового значения момента сопротивления (переход из точки А в точку В на механической характеристике). По аналогии на основании (5.37) может быть построено семейство искусственных характеристик при различных значениях Uя или Ф. Анализ таких характеристик будет проделан в разделе исполнительных двигателей постоянного тока (§ 5.7).
Рабочие характеристики. Рабочие характеристики двигателя – это зависимости угловой скорости ω, электромагнитного Мэм. и полезного М2 моментов и кпд η от полезной механической мощности на валу двигателя P2=M2ω при номинальном напряжении питания и отсутствии добавочных сопротивлений (). Однако у рассматриваемых двигателей рабочие характеристики построены не в функции полезной мощности двигателя P2, а в функции тока якоря Iя. Объясняется это тем, что в двигателях постоянного тока электрическая мощность, идущая на преобразование в механическую, поступает через цепь якоря. Ток якоря двигателей независимого и параллельного возбуждения, у которых скорость слабо зависит от нагрузки, практически прямо пропорционален мощности P2. Уравнения же рабочих характеристик через ток Iя получить гораздо проще. Характеристики ω= f(Iя) и Mэм.=а(Iя) могут быть построены соответственно на основании уравнений (5.36) и (5.10). Без учета реакции якоря эти характеристики линейные, у реальных машин под действием реакции якоря (изменение Ф) характеристики могут оказаться нелинейными. Полезная составляющая момента двигателя M2 меньше электромагнитного момента на значение момента холостого хода M0=(ΔPмех.+ΔPм)/ ω, где ΔPмех. – механические потери мощности (трение); Δ Pм – магнитные потери. Характеристики полезного момента M2 и КПД η начинаются из точки реального холостого хода, которому соответствует ток якоря Iяо (рис. 5.20,б). Кривая КПД имеет типичный для всех электрических машин характер, т.к. в двигателе имеются постоянные потери (ΔPмех.+ΔPм+UвIв), практически не зависящие от нагрузки (тока якоря), и переменные потери в якоре I 2я Rя .
Регулирование скорости. Угловую скорость двигателя при неизменном моменте сопротивления можно регулировать (см. (5.37)) тремя способами: 1)якорным – изменением напряжения на обмотке якоря Uя; 2)полюсным – изменением магнитного потока возбуждения Фв; 3)реостатным – изменением добавочного сопротивления Rд в цепи якоря. Регулировочные характеристики двигателей независимого возбуждения при якорном и полюсном способах управления будут подробно рассмотрены в разделе исполнительных двигателей (см. §5.7 ). При реостатном способе через реостаты Rд (см. ) должен длительно пропускаться значительный ток, что вызывает большие потери мощности, поэтому данный способ неэкономичен и применяется редко.
Пуск. В соответствии с уравнением равновесия моментов (2.29) условием пуска двигателя является неравенство Мп >Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте. Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Реверсирование. Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя Мэм и соответственно направление вращения ротора.
Торможение. У двигателей независимого и параллельного возбуждения возможны три тормозных режима: рекуперативное торможение, торможение противовключением и динамическое. При анализе тормозных режимов необходимо строить механические характеристики машины во всех четырех квадрантах плоскости Мэм, ω. Для построения механических характеристик можно пользоваться одним и тем же уравнением (5.37) с учетом знака Мэм в различных режимах работы машины. Рекуперативное торможение, или генераторное торможение с отдачей энергии в сеть, может быть осуществлено при ω>ω о.ид. В этом случае ЭДС якоря Eя > Uя (см. (5.6) и (5.38)), ток якоря меняет направление, машина переходит в генераторный режим и электромагнитный момент становится тормозным. Механической характеристикой в режиме рекуперативного торможения является продолжение механической характеристики двигателя во II квадранте (ω>0, Mэм(рис. 5.21,а, Uя2я1).
В момент уменьшения напряжения питания двигатель переходит из точки А характеристики 1 в точку В характеристики 2, момент Мэм меняет знак и начинается торможение двигателя до точки С. Торможение до остановки таким способом невозможно и он используется, в основном, при торможении на высоких скоростях. Способ экономичен благодаря возможности отдачи электрической энергии в сеть. Торможение противовключением может происходить в двух случаях: 1)если внешний момент, больший чем пусковой момент двигателя, заставляет вращаться якорь против его естественного направления вращения (работа в IV квадранте); 2)если изменяется полярность напряжения на якоре (или реже на обмотке возбуждения), а якорь по инерции продолжает вращаться в прежнем направлении. Далее рассматривается наиболее часто встречающийся второй случай с изменением полярности напряжения на якоре. При этом ток якоря Iя=(-Uя- Eя)/ Rя меняет направление и значение его резко возрастает, т.к. теперь напряжение и ЭДС действуют в одном направлении. Поэтому при торможении противовключением в цепь якоря обязательно включается добавочное сопротивление Rд . Изменение полярности напряжения на якоре означает, что изменится и знак скорости идеального х.х. ω о.ид, т.е. механическая характеристика пройдет через III квадрант (). В момент переключения напряжения двигатель переходит из точки А естественной характеристики двигательного режима I в точку В реостатной характеристики тормозного режима 2, момент Мэм меняет знак и начинается интенсивное снижение ω. В точке С скорость двигателя равна нулю, и его нужно отключить от источника питания. Если этого не сделать, то ротор начнет вращаться в противоположном направлении и перейдет в установившийся режим в точке D реостатной или, если Rд отключить, в точке D’ новой естественной характеристики 3, т.е. произойдет реверсирование двигателя. Динамическое торможение осуществляется отключением цепи якоря от источника постоянного тока U и замыканием ее на некоторое добавочное сопротивление Rд, называемое обычно тормозным реостатом (, перевод переключателя К из левого положения в правое).
При этом напряжение, прикладываемое к якорю, Uя=0, ток якоря (см. 5.39) Iя=-Eя/(Rя+Rд) меняет направление и электромагнитный момент Мэм становится тормозным. Запасенная во вращающихся частях привода кинетическая механическая энергия преобразуется в электрическую, и машина работает в генераторном режиме, отдавая электрическую энергию тормозным сопротивлениям. Уравнение механических характеристик (5.37) при Uя=0 принимает вид ω=-Мэм(Rя+Rд)/(kФ)2. Механические характеристики тормозного режима расположены во II квадранте плоскости Мэм,ω (, Rд2>Rд3). В момент переключения двигатель переходит из точки А естественной характеристики двигательного режима 1 в точку В характеристики тормозного режима 2, момент Мэм меняет знак и начинается динамическое торможение. Угловая скорость уменьшается, но при этом довольно резко уменьшается и тормозной момент (переход из точки В в С). С целью увеличения тормозного момента производится уменьшение добавочного сопротивления Rд (переход из точки С в точку D). Торможение происходит до нулевой скорости.
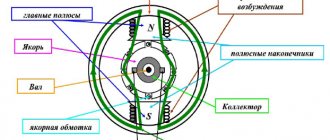
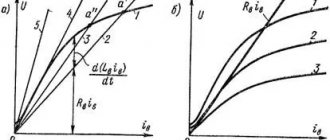
Двигатели последовательного и смешанного возбуждения. У двигателя последовательного возбуждения () ток якоря протекает по обмотке возбуждения (Iв= Iя) и это определенным образом сказывается на основных характеристиках двигателя. При отсутствии насыщения магнитопровода можно принять, что
Ф=KфIя, (5.40)
где Kф – коэффициент пропорциональности. С учетом (5.40) уравнения (5.10) и (5.37) принимают вид
Мэм=KKфIя2, (5.41)
ω = (U/ √(KKфMэм)) -(Rя+Rв/KKф), (5.42)
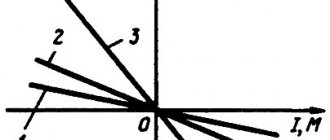
где Rв – сопротивление обмотки возбуждения. Механическая характеристика ( пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞. Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения. Пуск, реверсирование, торможение и регулирование угловой скорости двигателей последовательного возбуждения осуществляется теми же способами, что и у двигателей независимого и параллельного возбуждения с учетом специфики включения обмоток.
Двигатели смешанного возбуждения по своим характеристикам занимают промежуточное положение между двигателями независимого и последовательного возбуждения. Конкретный вид характеристик зависит от того, согласно или встречно(по потоку) включены между собой обмотки возбуждения.
Назад | Оглавление | Вперед
Применение мегаомметра
Проверить обмотку с помощью такого прибора можно, соблюдая небольшое правило, указанное ниже:
- когда питающее напряжение менее 500 В, нужно использовать прибор с подходящим номиналом;
- если напряжение равно 500 В и немного больше, нужно выбирать мегаомметр, рабочее напряжение которого доходит до 1000 В.
ВНИМАНИЕ! Для оборудования, рабочее напряжение которого рассчитано на 600 В, нужно обязательно использовать мегаомметр, который сможет выдержать 2500 В.
Измерения обмоток относительно корпуса электродвигателя проводят по очереди. Проверяют каждую цепь с разными выводами. Все оставшиеся концы должны быть присоединены к корпусу. Если двигатель трехфазный, подобный алгоритм проводят для каждой из трех составляющих электромотора.
Микроконтроллер
В качестве управляющего микроконтроллера выбран ATMega328p, работающий на частоте 16МГц. Обвязка микроконтроллера — китайский клон Arduino Nano v3 ($1.5).
Микроконтроллер генерирует ШИМ сигнал через восьмибитный счётчик с делителем 8, таким образом, частота ШИМ сигнала 16 * 10^6 /255 /8 = 7.8 кГц, что укладывается в максимально доступные для драйвера 20кГц.
Делитель АЦП микроконтроллера установлен на 128; поскольку каждое измерение требует примерно 13 тактов, максимальная частота измерений протекающего тока равна примерно 16 * 10^6 / 128 / 13 = 9.6 кГц. Измерения производятся в фоновом режиме, извещая основную программу об окончании при помощи вызова соответствующего прерывания.
Измерение сопротивления с применением повышенного переменного напряжения
Чтобы провести подобное испытание, нужен линейный преобразователь (другими словами, трансформатор). Он и будет источником повышенного напряжения, так как оборудован регулирующим прибором, который позволяет устанавливать конкретный уровень потенциала для испытаний. Для проведения таких испытаний потребуется повышенное напряжение, получаемое с линейного преобразователя (трансформатора). Последний оснащен устройством регулировки, позволяющим получать нужный уровень испытательного потенциала. Помимо трансформатора схема установки также необходимо наличие выключателя и устройства токовой защиты. Это помогает трансформатору отключиться, если в одной из цепей вторичной обмотки произойдет пробой или разрушится изоляционная защита.
Для проведения испытания основной изоляции, напряжение подается в течение одной минуты, а для испытания межвитковой – в течение пяти минут. Если высоковольтный потенциал приложить на короткое время, состояние изоляции никак не изменится, т.е. ее защитные свойства не ухудшаются.
Испытание изоляции двигателя повышенным напряжением
ВНИМАНИЕ! Во время повышения напряжения до трети начальной величины испытания, учитывать динамику процесса необязательно.
Когда треть нужного напряжения достигнута, начинайте наращение очень плавно. Скорость подачи должна быть такой, чтобы визуально фиксировать показания прибора можно было легко. В то же время, когда вы достигли половины нужного напряжения, закончить подачу до нужной отметки нужно как минимум через 10 секунд.
Проверка на короткое замыкание
Еще одной популярной поломкой электродвигателей, независимо от модели и типа, является короткое замыкание. Чтобы его выявить, нужно:
- установить максимальное значение измеряемого сопротивления;
- один из щупов подсоединить к корпусу;
- второй из щупов последовательно подсоединять к выводу всех фаз.
Высокие показатели сопротивления (сотни и тысячи мегаом) в результате такой проверки говорят от исправности электродвигателя.
Если совершить те же действия в режиме «Прозвона», то звук мультиметра будет говорить о наличии нарушения обмоток и наличии короткого замыкания. Такая поломка может не только вывести двигатель из строя, но и стать угрозой для жизни человека.
Выявление межвиткового замыкания
Третья, можно сказать, стандартная поломка – межвитковое замыкание. Так называют процесс короткого замыкания, происходящего между витками на одной катушке электродвигателя. Неполадка характерна сильным гудением мотора, заметным снижением мощности. Чтобы выявить неполадку такого типа, обычно используют токовые клещи или все тот же мультиметр. Во время диагностики токовыми клещами нужно измерить значение тока в каждой фазе. Нашли место, где оно завышено? Там есть замыкание.
Если провода электромотора покрыты специальной пленкой, но при остальных нормальных условиях сопротивление будет показывать одинаковое значение очень долгое время. Но эксплуатация оставляет свой след, и на защиту могут воздействовать некоторые разрушающие факторы. Ниже представлены основные из них:
- повреждения механического характера (удары, падения и т.д.);
- среда, где двигатель находился долгое время, обладала повышенной влажностью;
- среда постоянного нахождения электромотора характерна наличием в ней агрессивных химических веществ;
- в среде, где находится двигатель, часто колеблется температура.
Дополнительные факторы влияния: если двигатель работает больше, чем предписано по инструкции, его перегрев может негативно сказываться на состоянии обмотки.
Все, что перечислено ниже негативно влияет на показатели сопротивления. За этим следует пробой обмотки на корпус, возникает межфазное замыкание.
Если вовремя не выявить дефекты в работе электродвигателя постоянного тока, они могут привести к дополнительным ремонтным работам, с большими затратами труда и средств. Особенно это касается сопротивления в обмотках мотора. Не выявленные вовремя проблемы с данной характеристикой могут привести к полному выходу агрегата из строя и даже пожару. Чтобы избежать печальных последствий неисправности, сопротивление можно проверить с помощью мегаомметра, вольтметра и амперметра, применяя повышенное напряжение и многое другое.
Измерения с помощью моста и современного цифрового омметра
К каждому прибору, который вы собираетесь использовать есть инструкция. Если после покупки вы ее не сохранили, всю необходимую информацию легко найти в интернете. А понадобится она вам, потому что все измерения этим методом нужно делать строго по описанным правилам.
На схеме измерительного моста есть резисторы: постоянный и переменный. Соединяются они так, что образуются два так называемых плеча, имеют вид двух цепочек. Во второй половине будет свободное место. Там и включают сопротивление, величина которого подлежит измерению.
В диагонали измерительного моста включают прибор – цифровой омметр. Во время изменения величины переменного сопротивления можно добиться состояния, когда ток, текущий через «плечи» одинаковый. Сопротивление, которое ищется, вычисляется соотношением трех значений: два постоянных сопротивления и одного переменного (его получают в результате измерений с помощью прибора).
Цифровой омметр
Цифровой омметр – электронный прибор нового поколения. С его помощью стало возможным измерение сопротивления в широком диапазоне.