ХАРАКТЕРИСТИКИ КОЛЛЕКТОРНЫЕ УПРАВЛЕНИЕ
Двигатели переменного тока (ЭПТ) относятся к категории силовых агрегатов, в основу работы которых заложен принцип преобразования электрической энергии в механическое вращение.
Функционирование таких электротехнических устройств основано на эффекте вращающегося магнитного поля, создаваемого в статоре за счет соответствующего распределения питающего напряжения. Для понимания принципа работы двигателей переменного тока потребуется ознакомиться с существующими разновидностями этих агрегатов.
Виды двигателей переменного тока.
В зависимости от конструктивных особенностей и характера связи электромагнитного (э/м) поля вращающегося ротора и ЭДС неподвижного статора различают синхронные и асинхронные двигатели. В первых эта связь жесткая, а в асинхронных частоты их вращения отличаются на величину так называемого «скольжения».
По количеству полюсов, электромагнитных катушек статора и типу питающего напряжения все известные модели делятся на:
- однофазные (включая конденсаторные);
- трехфазные двигатели переменного тока;
- шаговые (многофазные) агрегаты.
По способу организации возбуждения и характеру связи с ротором различают коллекторные и бесколлекторные электродвигатели.
Электрический двигатель
Электродвигатель представляет собой электрическую машину, которая преобразовывает электроэнергию в энергию вращения вала с незначительными тепловыми потерями. Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
- Неподвижную часть (статор или индуктор).
- Подвижную часть (ротор или якорь).
В зависимости от предназначения, применяемого рода тока и конструктивных особенностей электрические двигатели имеют большое количество разновидностей.
Основная информация
Синхронный однофазный двигатель переменного тока работает от общественной сети
Итак, особенностью однофазного двигателя является то, что он способен запитываться от стандартной электрической сети с частотой 50 Гц и напряжением 220 В.
- Ставят такие электромоторы в основном в устройствах небольшой мощности, так как по эффективности они существенно уступают двухфазным и трехфазным аналогам.
- Мощность данных агрегатов варьируется от 5 Вт до 10 кВт.
- Однофазная схема подключения двигателя существенно влияет на его КПД, который приблизительно равен 70% от показателей такого же по мощности двигателя, но трехфазного. Также у них меньше пусковой момент, а перегрузочная способность выше.
Электрический двигатель в разрезе
- На самом деле, если разобрать строение такого двигателя, то он будет иметь 2 фазы, но так как задействуется, фактически, лишь одна из них, то и называют его однофазным.
- Строение мотор имеет самое что ни наесть классическое – подвижная часть (ротор или якорь) и неподвижная часть (статор).
- Вращение подвижных частей двигателя происходит за счет взаимодействия магнитных полей – подробнее об этом чуть дальше.
- Несомненным плюсом такого мотора можно считать простую и надежную конструкцию с короткозамкнутым ротором.
- А главным минусом можно посчитать неспособность самостоятельно выработать магнитное поле, что не позволяет ему самостоятельно запускаться при подключении к сети питания.
- Считается, что для того чтобы ротор пришел в движение требуется минимум 2 обмотки, а также смещение одной относительно второй на определенный градус.
Асинхронный двигатель переменного тока
- Если сопоставить все эти моменты, то можно понять следующее.
- На статоре однофазного электромотора располагается пусковая обмотка, которая смещена по отношению к рабочей, основной обмотке на 90 градусов.
- В цепь, питающую обмотку, включаю фазосдвигающее устройство – конденсаторы, катушки индуктивности, резисторы активного типа.
- То есть, фактически мы говорим про те же моторы двух- и трехфазного типа, только сдвиг фазы достигается не за счет подключения, а за счет схем согласования.
Принцип действия однофазного двигателя
Однофазный синхронный двигатель переменного тока
Теперь давайте попробуем систематизировать то, что мы понаписали в предыдущей главе, чтобы принцип работы таких устройств стал понятен каждому.
Как работает асинхронный электродвигатель однофазный
- Итак, при подключении питания, ток начинает бежать по обмоткам статора. Движение тока порождаем пульсирующее магнитное поле. Почему пульсирующее, да потому что ток в общественных сетях имеет частоту в 50 Гц, то есть за секунду 50 раз меняет направление своего движения. Соответственно меняются и параметры магнитного поля
- Мы все знаем про такое явление, как электромагнитная индукция. Если кто-то не знает, то бегом читать – вкратце, это явление порождает электрический ток в проводнике, который перемещается поперек магнитного поля, причем нет никакой разницы, что будет двигаться – проводник или поле.
- Если устройство не будет иметь пусковых механизмов, то ротор останется неподвижным, так как в нем до сих пор нет тока, а значит и магнитного поля, а магнитные поля от тока в статора равнозначны, и тянут, так сказать, в разных направлениях, как лебедь, рак и щука.
- Но если ротору дать толчок в любую из сторон, в нем моментально начнет расти электродвижущая сила (ЭДС), которая начнет генерировать свое магнитное поле. В результате взаимодействия этих полей двигатель продолжит вращаться в туже сторону, несмотря на то, что основное магнитное поле постоянно меняет свое направление.
Однофазный коллекторный электродвигатель переменного тока – принцип работы
- Заставляет сдвинуться с места ротор пусковая обмотка, которую мы уже упоминали. Точнее делает это результирующее магнитное поле от основной и пусковой обмоток.
- Эта обмотка требует включения только при пуске мотора.
Интересно знать! В маломощных моторах пусковая обмотка является короткозамкнутой.
- Момент включения пусковой обмотки связан с пусковой кнопкой – обычно ее необходимо удерживать на протяжении нескольких секунд, пока двигатель не начнет вращаться с нормальной скоростью.
- Когда контакт на кнопке размыкается, двигатель переходит полностью в однофазный режим.
- Важно помнить, что пусковая фаза не предназначается для долгой работы – обычно время ее активного состояния составляет около 3 секунд. Если попытаться превысить данное значение обмотка начнет перегреваться, что может привести к выходу элемента из строя.
- Становится понятным, что ручной контроль за пуском двигателя неэффективен и малонадежен, поэтому данный процесс в современных устройствах автоматизирован. В них устанавливаются тепловые реле и центробежные выключатели.
- Первый элемент контролирует нагрев обеих обмоток и отключает питание, если температура достигает критического значения.
- Второй отключает питание пусковой фазы, как только ротор разгонится до нужных оборотов.
Подключение двигателя
Как подключается коллекторный однофазный электродвигатель переменного тока
Итак, мы уже поняли, что для работы такому мотору требуется всего одна фаза на 220 В, то есть включается он в обыкновенную розетку, что, собственно, и делает эти устройства такими популярными несмотря на низкий КПД и прочие недостатки.
Интересно знать! Практически все бытовые приборы оборудованы именно такими двигателями.
Различные варианты подключения
- Однофазные двигатели переменного тока по подключению делят на три типа: вариант с пусковой обмоткой и рабочим конденсатором.
- В первом пусковая обмотка запитана через конденсатор только во время старта – собственно, его мы описали в предыдущей главе.
- Во втором она подключена через конденсатор постоянно.
- В третьем вместо конденсатора используется сопротивление.
Коллекторный однофазный двигатель переменного тока от стиральной машины
- Для последнего типа подключения может использоваться пусковой резистор, который подключается к пусковой обмотке последовательно. За счет этого удается получить сдвиг фаз на 30 градусов, чего вполне хватает для раскрутки двигателя.
- Также дополнительная обмотка может сама по себе иметь высокое активное сопротивление.
- Сдвиг фаз также может быть получен за счет того, что пусковая фаза будет иметь высокое сопротивление и меньшую индуктивность.
Конденсаторный пуск имеет следующие особенности:
- Чтобы достигнуть максимального значения пускового момента, достаточного для старта двигателя, нужно вращающееся круговое магнитное поле. Таковое возникает, когда обмотки сдвинуты относительно друг друга на 90 градусов – сразу становится понятно, что ни резистор, ни дроссель не смогут задать такое значение. А вот если правильно подобрать емкость конденсатора – ну вы поняли…
- Конденсатор необходимо подбирать по потребляемому току.
Конденсатор и переменный ток
Интересно знать! На нашем сайте есть очень познавательная статья про то, как конденсаторы ведут себя в цепи переменного тока. Если интересно, обязательно ознакомьтесь.
Кстати, если вы пытаетесь самостоятельно подключить такой двигатель в сеть, но не знаете, какие выводы к какой обмотке относятся, просто замерьте их сопротивление. Для основной оно составит где-то 12 Ом, а для пусковой – 30.
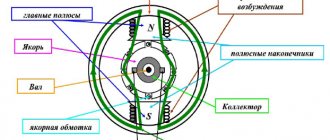
Двигатели постоянного тока
Электродвигатели постоянного тока объединяют широкий ассортимент устройств, обеспечивающих высокий КПД при трансформации электрической энергии в механическую. Для надежного соединения электрической цепи подвижной и неподвижной части электропривода постоянного тока используют щеточно-коллекторный узел. В зависимости от конструктивных особенностей щеточно-коллекторного узла, все электрические машины постоянного тока подразделяют на следующие группы:
- Коллекторные.
- Бесколлекторные.
В свою очередь коллекторные электродвигатели условно разделяют на следующие виды:
- Самовозбуждающиеся.
- С возбуждением от электромагнитов постоянного действия.
Устройства с независимым возбуждением характеризуются низкой мощностью, поэтому данные электроприводы используют для не ответственных операций с низкой нагрузкой. Машины с самовозбуждением подразделяют на:
- Устройства с последовательным возбуждением, где якорь подключается последовательно обмотке возбуждения.
- Электродвигатели с параллельным возбуждением, где якорь включается параллельно обмотке возбуждения.
- Электропривод смешанного возбуждения, который характеризуется наличием параллельных и последовательных соединений.
Принцип действия
Школьный опыт с демонстрацией вращения рамки в магнитном поле отрытый в 1821 Фарадеем поясняет работу двигателя постоянного тока. Металлическая рамка с проходящим через нее током от батареи повернется под действием магнитного поля так, чтобы его воздействие стало нулевым. Для получения непрерывного вращения необходимо в этот момент поменять направление тока, либо объединить несколько рамок в процессе.
Двигатели переменного тока
Электродвигатели переменного тока представлены широкой номенклатурой устройств, которые различают по многочисленным конструктивным и эксплуатационным характеристикам. В зависимости от скорости вращения ротора выделяют электрические машины синхронного и асинхронного типа.
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Асинхронный электрический двигатель имеет частоту вращения ротора отличную от частоты вращения магнитного поля питающего напряжения. В настоящее время этот тип электродвигателей получил самое широкое распространение как на производстве, так и в быту.
В зависимости от количества фаз питающего напряжения электропривод принадлежит к одной из групп:
- 1-нофазные;
- 2-хфазные;
- 3-хфазные;
- многофазные.
Синхронный двигатель
В машине этого типа, в отличие от предыдущего, ротор вращается с той же частотой, что и магнитное поле.
Устройство
Основные части машины – якорь и обмотка возбуждения (индуктор). Ротор в таком электроприводе находится на статоре, а индуктор располагается на роторе, который от неподвижной части машины отделен неким зазором.
Синхронный двигатель с постоянными магнитами
Можно сказать, что принцип действия синхронной машины – «вывернутый наизнанку» двигатель постоянного тока. Получение переменного тока обмоткой происходит от внешнего источника, а не от коллектора.
Якорем синхронного двигателя является одна или несколько обмоток. С помощью токов, которые туда подаются, появляется магнитное поле, сцепляющееся с полем индуктора на роторе. Именно так происходит превращение электрического ресурса в механический.
Индуктор синхронной машины состоит из электромагнитов постоянного тока или постоянных магнитов. Существует две конструкции индукторов:
- явнополюсная конструкция машины имеет ярко выраженные полюса. Они очень похожи на устройство полюсов в агрегатах постоянного тока;
- неявнополюсная конструкция схожа со строением фазного ротора, где обмотку укладывают в пазах сердечника. Принципиальная разница заключается в том, что в устройстве синхронной неявнополюсной машины есть место между полюсами, которое не заполняют проводниками. Это снижает механическую нагрузку на полюса.
Принцип действия
Принципом действия синхронного двигателя является взаимодействие между магнитным полем якоря и магнитным полем индуктора. Постоянные магниты используются для маломощных машин, а электромагниты в более мощных.
Нужно также упомянуть о том, что есть так называемая обращенная конструкция синхронного двигателя. В ней индуктор размещен на статоре, а якорь на роторе. Такую вариацию использовали на уже устаревших двигателях и до сих пор используют при создании криогенных синхронных агрегатов (в их обмотках, как правило, используют сверхпроводники).
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.
- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.
- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Понятие мощности электродвигателя
Мощность – пожалуй, самый важный параметр при выборе электродвигателя. Традиционно она указывается в киловаттах (кВт), у импортных моделей – в киловаттах и лошадиных силах (л.с., HP, Horse Power). Для справки: 1 л.с. приблизительно равна 0,75 кВт.
На шильдике двигателя указана номинальная полезная (отдаваемая механическая) мощность
. Это та мощность, которую двигатель может отдавать механической нагрузке с заявленными параметрами без перегрева. В формулах номинальная механическая мощность обозначается через Р2.
Электрическая (потребляемая) мощность
двигателя Р1 всегда больше отдаваемой Р2, поскольку в любом устройстве преобразования энергии существуют потери. Основные потери в электродвигателе – механические, обусловленные трением. Как известно из курса физики, потери в любом устройстве определяются через КПД (ƞ), который всегда менее 100%. В данном случае справедлива формула:
Р2 = Р1 · ƞ
КПД в двигателях зависит от номинальной мощности – у маломощных моделей он может быть менее 0,75, у мощных превышает 0,95. Приведенная формула справедлива для активной потребляемой мощности. Но, поскольку электродвигатель является активно-реактивной нагрузкой, для расчета полной потребляемой мощности S
(с учетом реактивной составляющей) нужно учитывать реактивные потери. Реактивная составляющая выражается через коэффициент мощности (cosϕ). С её учетом формула номинальной мощности двигателя выглядит так:
Р2 = Р1 · ƞ = S · ƞ · cosϕ
Степень защиты корпуса
Для условного обозначения степени защиты корпуса электрической машины от воздействия вредных факторов окружающей среды используют аббревиатуру IP. При этом на корпусе электропривода указывают следующую информацию:
- Высокий уровень защиты от пыли — IP65, IP66.
- Защищенные — не ниже IP21, IP22.
- С защитой от влаги — IP55, IP5.
- С защитой от брызг и капель — IP23, IP24.
- Закрытое исполнение — IP44 — IP54.
- Герметичные — IP67, IP68.
При подборе электрического двигателя для эксплуатации в условиях воздействия определенных вредных факторов, необходимо тщательно подходить к выбору степени защиты его корпуса.
Расчет мощности при помощи счетчика электроэнергии
Этот способ прост и не требует дополнительных инструментов и знаний. Достаточно подключить двигатель через счетчик (трехфазный узел учета) и узнать разницу показаний за строго определенное время. Например, при работе двигателя в течении часа разница показаний счетчика будет численно равна активной мощности двигателя (Р1). Но чтобы получить номинальную мощность Р2, нужно воспользоваться приведенной выше формулой.
Другие полезные материалы:
Степени защиты IP Трехфазный двигатель в однофазной сети Типичные неисправности электродвигателей
Общие требования безопасности при монтаже и эксплуатации
При монтаже электрического двигателя необходимо придерживаться следующих требований:
- Перед подключением проверить соответствие частоты и напряжения питающей сети с информацией на паспорте электрического двигателя.
- Перед установкой электрической машины обязательно проводят измерение сопротивления электрической изоляции обмотки статора относительно корпуса. При неудовлетворительных значениях проводят просушивание изоляции до достижения требуемого значения.
- При сопряжении валов необходимо точно соблюдать соосность с допустимым отклонением не более 0,2 мм.
- Для заземления корпуса электродвигателя используют только специальные заземляющие устройства, предусмотренные инструкцией завода производителя.
- Строго запрещен монтаж электропривода под напряжением.
В процессе эксплуатации электрических машин следует придерживаться следующих основных правил:
- Регулярный осмотр состояния электродвигателя является залогом своевременного определения неисправностей.
- Регулярно на протяжении всего срока эксплуатации проводят проверку исправности токовой и тепловой защиты, чистку и смазку, проверку контактных соединений и надежности заземления.
- При наличии повышенного шума или стука, проводят вибродиагностику с целью определения состояния подшипников и других вращающихся деталей.
- Следует исключить длительную работу однофазного электродвигателя в режиме холостого хода, что негативно влияет на срок его службы.
- Запрещается эксплуатация электрического двигателя с неисправной защитой от перегрева, перегрузки или завышенным значением сопротивления контура заземления.
Выбор электродвигателей
На описании принципов работы, устройства и краткого изложения характеристик однозначный выбор в пользу того или иного решения можно сделать только в самых простейших случаях. Современные электрические машины становятся все более универсальными. Какая разница есть между двигателем и генератором, в чем различие машин постоянного и переменного тока на первый взгляд не всегда возможно понять.
Развитие электронной промышленности размывает границы ниш. Теперь и двигатели постоянного тока, и двигатели переменного тока теряют свои позиции. Появление частотного регулирования скорости и момента асинхронных короткозамкнутых и синхронных двигателей все сильнее смещает принятие решения из инженерной сферы в технико-экономическую.
Электрические машины выбирают на основе следующих критериев:
- стоимость двигателя, силового преобразователя и программного обеспечения к нему;
- издержки на обслуживание и эксплуатационные расходы;
- надежное решение технологических задач в производстве;
- габаритные размеры и необходимую площадь.
Это только начало. В крупных проектах придется учитывать воздействие на окружающую среду, штрафы на искажение сетевой частоты и так далее. Чтобы принять оптимальное решение в конкретном случае — какой электродвигатель и с каким приводом применять — придется оценить совокупность множества условий.
Крановые электродвигатели
Крановые электродвигатели представляют собой асинхронные устройства переменного тока или двигатели постоянного тока с параллельным или последовательным возбуждением.
В отличие от других категорий электродвигателей, крановые электроприводы имеют следующие особенности:
- Большинство крановых электрических двигателей имеет закрытое исполнение корпуса.
- Момент инерции на роторе составляет минимально возможное значение, что обеспечивает минимальные потери энергии во время переходных процессов.
- Кратковременная перегрузка по моменту для крановых двигателей постоянного тока составляет 2,0 — 5,0, а для электромоторов переменного тока 2,3 — 3,5.
- Класс нагревостойкости изоляционных материалов не менее F.
- У кранового электропривода переменного тока в номинальном режиме ПВ составляет не менее 80 минут.
- С целью получения большой перегрузочной способности по моменту добиваются высоких значений магнитного потока.
- Отношение максимально допустимой частоты вращения к номинальному значению для электродвигателей постоянного тока составляет 3,5 — 4,9, а для машин переменного тока 2,5.
Эксплуатация кранового привода характеризуется следующими условиями эксплуатации:
- Частые пуски, реверсы и торможения.
- Регулирование частоты вращения в широком диапазоне значений.
- Повышенная вибрация и тряски.
- Повторно-кратковременный режим работы.
- Воздействие высокой температуры, газа, пыли и пара.
- Значительная перегрузка во время работы.
Электроника для всех
Продолжаем наш ликбез по движкам. На этот раз речь пойдет о переменном токе, трехфазных движках разной конструкции. Их характеристикам, устройству и принципу работы. Ну и заодно подготавливаем почву под BLDC, так как там получается зверский гибрид всего и вся.
▌Вращающееся поле
Вращающееся поле это краеугольный камень всех машин переменного тока. Без него ничего не было бы и все было бы уныло и пресно. Делается оно посредством хитрой обмотки и хитрого напряжения. Сейчас подробно покажу как.
Начнем с упрощенной одновитковой обмотки. Вот такой:
Подаем на него напряжение, получаем ток, создающий магнитный поток. Направление потока зависит от направления тока. Определяется по правилу буравчика. Вспоминаем курс физики из школы  Если сунуть туда синусоидальное напряжение, то поток через обмотку будет шнырять туда-сюда по синусоидальному же закону.
Если сунуть туда синусоидальное напряжение, то поток через обмотку будет шнырять туда-сюда по синусоидальному же закону.
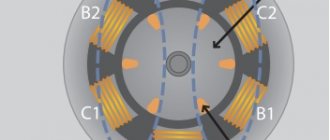
Берем три обмотки и ставим их так, чтобы магнитное поле, ими генерируемое, было направленно под 120 градусов относительно катушек.
Получаем упрощенный вариант статора. Соединяем обмотки треугольником: Оставим от него только направления векторов, чтобы посмотреть на это в разрезе. И загоняем в эту обмотку трехфазное напряжение. Три синуса, сдвинутые под 120 градусов. Если взять в какой-либо момент времени напряжения и разложить магнитные потоки по векторам, которые задают наши катушки, с учетом знака, а потом все суммировать, то получим результирующий вектор магнитной индукции трех катушек. Проделав ту же операцию на несколько углов вперед будет явно видно, что результирующий вектор вращается аки часовая стрелка.
Т.е. статор, с точки зрения магнитного поля, ведет себя как вращающийся магнит. Делающий один оборот за период. Вот вам каноничная картинка, что есть в каждом учебнике по электромашинам. Полный оборот поля. Я лишь сделал ее более няшный вариант, раскрасив витки в цвета обмоток, чтобы по феншую было все.
Скорость вращения поля зависит от частоты сети. n1 = 60*f (об/мин) эта скорость зовется синхронной скоростью
. Но не все так просто. Количество полюсов машины может быть и иным. Выше был пример статора двухполюсной машины. Два полюса потому, что там у результирующего магнитного потока есть север и юг и все. Но полюсов может быть больше.
Для этого обмотку каждой фазы делают из двух соединенных катушек, как то так:
И размещают их со сдвигом в 60 градусов. Вот, примерно, следующим образом. Тут у меня по одному недавитку, но их может быть и сто. Соединение секций между собой выделено более тонким проводом и чуть другим цветом.
В результате получается вот такая вот магнитная схема:
Видно, что эти четыре гипножабы образуют четыре полюса, два северных, два южных. А дальше как в старом советском мультике… пока ты на коне на четырех ногах раааз, двааа, триии, четырее… он на своих двоих раз-два, раз-два, раз-два. В четырехполюсном движке поле вращается вдвое медленней, т.к. за один период оно пробежит только пол оборота. Чем больше полюсов, тем медленней вращается поле.
С учетом количества полюсов синхронная скорость вычисляется так: n1=60*f/p ,где p — число катушек в одной фазе. Правда тут стоит учитывать такой случай, что катушки можно намотать так, что две будут вести себя как одна. В этом случае, естественно, считаем ее за одну, хоть их физически и две.
На этом принципе, кстати, в некоторых случаях делают управление скоростью двигателя. Т.е. хитро переключая катушки делают, например, либо два полюса, либо четыре. Ступенчато переключая скорость.
▌Реверс поля
Тут даже и говорить нечего — меняем местами две фазы и поле поехало в другую сторону. Элементарно
▌Асинхронный двигатель
Вы наверняка все знаете его. Помнишь как в детстве, разбираешь движок, надеешься на нямку и ништяки, а оттуда выпадает тупая алюминиевая блямба и обламывает весь кайф. Вот такой вот, малята, АД. В смысле асинхронный двигатель.
Асинхронный двигатель это король электропривода. Он технологичен, а значит дешев. Надежен, там трутся только подшипники. Прост и легко запускается. Не требует никакого дорогостоящего барахла, вроде редкоземельных магнитов. Есть у него и недостатки — сложности регулирования скорости и своебразная механическая характеристика, но все это решается умной электроникой.
Как же он работает то? Сейчас разберем.
Итак, у нас есть статор и его вращающееся поле:
в него мы помещаем короткозамкнутую обмотку ака «беличье колесо»
Она состоит из штырей закороченных на лобовые кольца. А обычно еще проще делают. Набирают шихтованный ротор (т.е. из изолированных пластин, чтобы гасить вихервые токи) окаливают его, создавая тем самым изоляцию, а потом заливают в пазы цельнолитую алюминиевую обмотку. Дешево, просто, технологично.
Так вот, поле бежит мимо этих штырей наводя в них ЭДС. А так как обмотка замкнута, то эта ЭДС порождает ток. Но если у нас есть ток и есть магнитное поле статора, то должна неминуема появиться сила Ампера. И она появляется. Обмотка начинает увлекаться за полем. Но догнать его не может никогда, ведь если она его догонит, то движение поля относительно обмоток станет равным нулю и сила пропадет. Вот так и плетется она в конце на подсинхронной частоте. Потому и зовется двигатель асинхронным. А относительная разность скорости поля и ротора зовется скольжением.
s=(n1-n)/n1
Измеряется в единицах или процентах. Обычно, на номинальном моменте, скольжение составляет 2-7% С ростом нагрузки скольжение растет. А скорость вращения движка завязана на скорость поля. Что сильно обламывает любителей регулировать скорость. Потому то асинхронные двигатели до сих пор не вытеснили те же коллекторные отовсюду откуда можно. Мало того, что им нужна переменка, так еще и не погазуешь нифига.
▌Механическая характеристика АД. Пуск и регулирование скорости
Она весьма извилистая, с рядом приколов. Вот такая:
Обратите внимание на разницу между пусковым и максимальным моментом. Т.е. движок должен стартануть в относительно тепличных условиях и лишь потом можно его грузить. Да и то до некоторого предела, до точки Ж, где случается жопа. Машина теряет устойчивость, момент резко снижается, а обороты падают до нуля. Движок лишь беспомощно дергается и очень сильно греется. Ведь в этот момент он превращается в обычный трансформатор у которого ротор это вторичная обмотка и она закорочена наглухо.
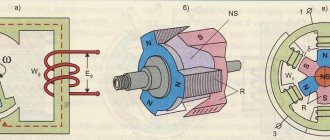
Вариантов борьбы с этим явлением несколько. Обычно конструктивные, делают либо две беличьи клетки одна над другой, либо просто глубокие пазы, т.е. клетка получается не из прутьев, а из пластин. Это снижает разницу между моментом критическим и пусковым. Еще, в особо тяжелых случаях, вроде кранового привода, делают фазный ротор. Т.е. обмотка не беличья клетка, а нормальная обмотка трехфазная. Из провода, ее концы с одной стороны соединены звездой, а с другой вытащены наружу через контактные кольца. Вот как на этой картинке под четвертым номером:
С них заводят на пусковые сопротивления:
И при пуске вводят все сопротивления в ротор, при этом ток падает, механическая характеристика проседает, а пусковой момент увеличивается. Потом, по мере разгона, сопротивления выводят посекционно, а движок переходит с одной характеристики на другую, пока не выйдет на естественную. Делается это автоматом, по реле времени или через реле контроля скорости.
Впрочем, это вам так, для общего развития. Не думаю, что с таким пуском столкнетесь вживую. Разве что вы не работаете цеховым электриком и колупаете краны выпуска еще прошлого века. Сейчас все это активно отмирает и заменяется на частотное регулирование.
Снижение напряжения фазного дает лишь некоторое смягчение характеристики, с падением момента. Но обороты остаются в целом прежними.
Т.е. по простому скоростью не порулишь как хочется. Что делать? На помощь тут идет электроника и частотное регулирование. Т.е. мы сетевое напряжение сначала выпрямляем, а потом на инверторе вкручиваем любую частоту какая нам нужна. И профиты сплошные. выглядит это так:
Но тут мы наблюдаем другую проблему — разгоняя частоту мы теряем в критическом моменте и снижается пусковой момент. Почему? А дело все в том, что поток завязан на частоту. Если пренебречь падением напряжения на обмотках статора, то ЭДС примерно будет равна напряжению на фазах движка.
Uф≈K Φ f1
К — конструктивный коэффициент. Т.е. у нас поток Ф зависит от частоты. Повышаем частоту и чтобы уравнение выполнялось должен снизиться поток, со всеми последствиями в виде провала по моменту.
Но что если заложить номинальную частоту в максимум возможного для данного двигателя, а регулировать вниз? Тут тоже проблемы возникнут. Поток будет расти, но бесконечно расти он не сможет, железо магнитопровода перенасытится и упадет КПД. Это просто энергетически невыгодно, зачем нам грелка, когда нужна крутилка? Так что при изменении частоты не помешает и подкорректировать напряжение так, чтобы держать поток в пределах номинального, так потерь меньше.
▌Синхронный двигатель
Еще одна забавная машинка, работающая на вращающемся поле. Вспомним картинку вращающегося поля и сунем в ее чрево постоянный магнит.
Опа, магнит вращается синхронно полю. Механическую характеристику этого безобразия я даже не буду рисовать. Она скучна как пульс у трупа. Скорость жестко завязана на скорость поля и не зависит от момента, совсем. Абсолютно жесткая механическая характеристика.
Разумеется это не навсегда, если момент будет сильней поля, то он может оторвать его от поля, движок выпадет из синхронизма и настанет жопа — сам он в синхронный режим уже не вернется. Тут ситуация еще хуже чем с асинхронным двигателем. Синхронный двигатель даже нормально запуститься не сможет. Т.е. если его воткнуть в сеть то фиг он куда поедет, будет стоять и беспомощно дрыгаться. Вот такая, херня, малята.
Дети, давайте поможем дедушке двигателю стартануть! Что надо сделать? Правильно, Петя, надо подружить его с асинхронным двигателем — сунуть ему в нутро до кучи еще и беличью клетку. Это будет пусковая обмотка. Она рванет движок со старта, доведет его до подсинхронной частоты, а там он втянется в синхронизм как удав в пылесос. Правда момент такого пуска слабоват, но хоть что то. Но такие проблемы это геморрой еще прошлого века.
Сейчас есть новые, усовершенствованные методы старта синхронного двигателя. Потому, что у нас прогресс, модернизация в стране и нанотехнологии. В первую очередь я имею ввиду частотный пуск. Т.е. когда при старте поле статора не рвет с нуля на номинальные обороты, а нежно хватает движок за торчащие из ротора яй… эээ силовые линии магнитного поля и начинает плавно разгонять пока не выведет в номинал. Еще в начале может быть ориентирующий рывок, когда напряжение подается статично, на одну из фаз, чтобы придать ротору какой-то определенный ориентир, а дальше уже разгон.
Наиболее наглядно это можно увидеть на приводе шпинделя жесткого диска. Если у вас есть убитый жесткач, то разберите его и подайте питание на плату. Увидите, как движок плавно стартанет, но если его затормозить, то он встанет и будет лишь вяло вяло крутиться — выпал из синхронизма. Если сможете разогнать его до 7200 оборотов, то он втянется, и будет дальше вращаться как ни в чем не бывало.
Устранение этого недостатка может быть только одно — контроль положения ротора, т.е. система управления зорко глядит на то куда повернут ротор и не дает полю его упустить. Если движок нагружается, поле притормаживает, следуя за ротором так, чтобы получить наибольший момент. Способов следить много. Это и сельсины и датчики холла и энкодеры и оптика всякая. Есть еще и извращенские способы по замеру индукции на обмотке, что часто практикуется в модельных инверторах. И со всей этой тряхомудией это уже получается самый настоящий BLDC о которых я тоже когда-нибудь расскажу. Через пару лет, ага. Бугагага!
Регулирование синхронного двигателя сходно с асинхронным. Те же приколы связи частоты, потока и напряжения. Т.к. статор там точно такой же. Разве что скольжения нет, но есть критический момент, а он завязан на поток.
Общепромышленные электрические двигатели
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Асинхронный трехфазный двигатель
Двигатели, использующие трехфазную электрическую сеть для создания статором вращающегося магнитного поля. По конструктивному исполнению ротора они делятся на короткозамкнутые и фазные.
Для короткозамкнутого ротора — в пазы собранного из листов электротехнической стали цилиндра заливается алюминий (реже медь) и по торцам соединяются токопроводящими кольцами. В этой «беличьей» клетке образуется ЭДС, затем ток и магнитное поле для вращения вала. Последние конструкции таких двигателей используют цельно металлический полый алюминиевый ротор.
В фазных моторах трехфазная обмотка, соединенная «звездой», укладывается в пазы ротора и свободные концы выводятся на контактные кольца для подключения сети или резисторов для снижения пускового тока
Однофазный асинхронный мотор не может создать вращающееся магнитное поле, способное заставить ротор вращаться. Для того чтобы сдвинуть ротор, на статоре укладывается две обмотки: пусковая и рабочая. Во время пуска напряжение подается на рабочую и, на короткое время через конденсатор, на пусковую катушку. Созданный таким образом перекос фаз заставляет вращаться ротор, пусковая обмотка отключается, а двигатель входит в номинальный режим.
Электрические двигатели с электромагнитным тормозом
Электрический привод с электромагнитным тормозом предназначен для эксплуатации в повторно-кратковременном или кратковременном режиме. Он разработан специально для механизмов, которые требуют форсированной остановки в строго регламентированное время. К таким механизмам относят: электрические тали, автоматизированные складские системы, обрабатывающие станки и др. Тормозной механизм, как правило, располагают со стороны противоположной валу двигателя. Он обеспечивает быстрое торможение электрического привода при отключении питания, а при повторной подаче напряжения растормаживает его.
Электрические машины со встроенным электромагнитным тормозом работают по следующему принципу:
- Электромагнитную катушку тормоза подключают последовательно к одной из фазных обмоток электродвигателя.
- Катушка получает постоянное напряжение посредством выпрямляющего устройства, которое располагают возле коробки с выводами или переменное напряжение непосредственно с обмотки электродвигателя.
- При отсутствии фазного напряжения катушка обесточивается, и якорь прочно зажимает блокировочный механизм.
- После восстановления электрического питания катушка подтягивает якорь, что позволяет валу двигателя свободно перемещаться.
В зависимости от способа монтажа электромоторы со встроенным электромагнитным тормозом изготавливают в следующих исполнениях:
- С горизонтальным валом.
- С вертикальным валом.
Благодаря своим преимуществам по времени остановки вала электродвигателя, этот тип электропривода обеспечивает надежную и безопасную эксплуатацию устройств с высокими требованиями к позиционированию или аварийной остановке.
Виды электродвигателей: классификация
Жёсткой классификации электродвигателей нет, но различать их можно по нескольким параметрам. Основные – тип питания и наличие скользящего контакта. Эти позиции можно считать ключевыми и по ним проще ориентироваться. В общем-то, видов электродвигателей не так и много – синхронные, асинхронные, постоянного тока, вентильные. Вот, пожалуй, всё. Другое дело, что в большинстве «категорий» есть достаточно вариантов, которые значительно меняют свойства и характеристики. Но с этим придётся разбираться применительно к каждой конструкции.
Электрические двигатели отличаются типом питания, устройством и назначением
Итак, рассмотрим виды электродвигателей по виду питающего напряжения. Они бывают:
- постоянного тока;
- переменного тока: однофазное питание;
- трехфазное питание;
Пояснений требует только универсальный тип. Такой электродвигатель может работать как от постоянного, так и от переменного напряжения. По сути, один вид – универсальный коллекторный двигатель с обмотками возбуждения. К двигателям переменного тока относятся синхронные, асинхронные. На постоянном токе работают коллекторные и вентильные.
Наиболее распространённые виды электродвигателей
По способу передачи электропитания все электродвигатели можно разделить на две группы:
- с коллектором (щёточные);
- без коллектора (бесщёточные).
Бесщёточные электродвигатели требуют меньше обслуживания, работают тише, более надёжны. К ним относятся асинхронные с короткозамкнутым ротором (работают от переменного напряжения), вентильные (питаются постоянным напряжением). Остальные имеют коллектор и щётки, через которые на обмотки катушек подаётся напряжение.
Режимы работы электродвигателей
Режим работы определяет нагрузку на электродвигатель. В некоторых случаях она остается практически неизменной, в других может изменяться. Характер предполагаемой нагрузки обязательно учитывается при выборе двигателя. Действующими стандартами предусмотрены следующие режимы эксплуатации:
Режим S1 (продолжительный). При таком режиме эксплуатации нагрузка остается постоянной в течение всего времени, пока температура электродвигателя не достигнет необходимого значения. Мощность привода рассчитывается по формулам, приведенным выше.
Режим S2 (кратковременный). При эксплуатации в этом режиме температура двигателя в период его включения не достигает установившегося значения. За время отключения электродвигатель охлаждается до температуры окружающей среды. При кратковременном режиме эксплуатации необходимо проверять перегрузочную способность электропривода.
Режим S3 (периодически-кратковременный). Электродвигатель работает с периодическими отключениями. В периоды включения и отключения его температура не успевает достигнуть заданного значения или охладиться до температуры окружающей среды. При расчете мощности двигателя обязательно учитывается продолжительность пауз и потерь в переходные периоды. При выборе электродвигателя важным параметром является допустимое количество включений за единицу времени.
Режимы S4 (периодически-кратковременный, с частыми пусками) и S5 (периодически-кратковременный с электрическим торможением). В обоих случаях работа двигателя рассматривается по тем же параметрам, что и в режиме эксплуатации S3.
Режим S6 (периодически-непрерывный с кратковременной нагрузкой). Работа электродвигателя в данном режиме предусматривает эксплуатацию под нагрузкой, чередующуюся с холостым ходом.
Режим S7 (периодически-непрерывный с электрическим торможением)
Режим S8 (периодически-непрерывный с одновременным изменением нагрузки и частоты вращения)
Режим S9 (режим с непериодическим изменением нагрузки и частоты вращения)
Большинство моделей современных электроприводов, эксплуатируемых продолжительное время, адаптированы к изменяющемуся уровню нагрузки.
Виды электродвигателей: какой лучше
Описаны только основные виды электродвигателей и даны краткие характеристики, очень сжато описано устройство и принцип работы. Тем не менее, уже можно сделать выводы о том, что идеального решения, причём для всех случаев, просто нет. Есть наиболее подходящее для каждого конкретного случая.
- Асинхронный электродвигатель без частотного регулирования – лучший выбор для насосов.
- Коллекторный двигатель с его регулируемыми скоростями вне конкуренции для дрелей и пылесосов. И то, в последнее время стали делать с вентильными, они без щеток, что делает работу тише, срок службы дольше, хотя цену выше. Так что, тут, как посмотреть.
Выбирать вид электродвигателя надо под каждый конкретный случай
- Для вентиляторов с длительным режимом работы выбирать приходится между асинхронных и вентильных. Но только если они не слишком мощные. Для мощных важным является возможность разделения на секции, а это проще реализовать у вентильных. И даже на кулерах стали в последнее время использовать вентильные с магнитным ротором.
В общем, чтобы ответить какой лучше, надо рассматривать совокупность условий и характеристик работы. Принимать во внимание достоинства и недостатки, перебирать все виды электродвигателей и только так можно найти оптимальный.