Двигатель с независимым возбуждением
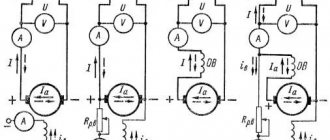
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
Регулирование скорости посредством ослабления магнитного потока
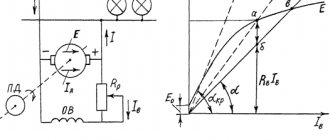
Регулирование скорости посредством ослабления магнитного потока производится обычно с помощью реостата в цепи возбуждения Rр.в (смотрите рисунок 1, б в статье «Общие сведения о генераторах постоянного тока» и рисунок 1 в статье «Пуск двигателей постоянного тока»). При отсутствии добавочного сопротивления в цепи якоря (Rра = 0) и U = const характеристики n = f(Iа) и n = f(M), определяемые равенствами (7) и (9), представленными в статье «Общие сведения о двигателях постоянного тока», для разных значений Rр.в, iв или Фδ имеют вид, показанный на рисунке 2. Все характеристики n = f(Iа) сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе Iа, который, согласно выражению (5), представленному в статье «Общие сведения о двигателях постоянного тока», равен
Iа = U / Rа .
Однако механические характеристики n = f(M) пересекают ось абсцисс в разных точках.
Нижняя характеристика на рисунке 2 соответствует номинальному потоку. Значения n при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривой Mст = f(n) для рабочей машины, соединенной с двигателем (жирная штриховая линия на рисунке 2).
Точка холостого хода двигателя (M = M0, Iа = Iа0) лежит несколько правее оси ординат на рисунке 2. С увеличением скорости вращения n вследствие увеличения механических потерь M0 и Iа0 также увеличиваются (тонкая штриховая линия на рисунке 2).
Если в этом режиме с помощью приложенного извне момента вращения начать увеличивать скорость вращения n, то Eа [смотрите выражение (6) в статье «Общие сведения о двигателях постоянного тока»] будет увеличиваться, а Iа и M будут, согласно равенствам (5) и (8), представленным в статье «Общие сведения о двигателях постоянного тока», уменьшаться. При Iа = 0 и M = 0 механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности, а при дальнейшем увеличении скорости Iа и M изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рисунке 2 левее оси ординат).
Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1 : 2. Изготавливаются также двигатели с регулированием скорости таким способом в пределах до 1 : 5 или даже 1 : 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов (смотрите статью «Регулирование скорости вращения и устойчивость работы двигателей постоянного тока») или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
2.77 (13 Голоса)
- Вперед
Естественные скоростная и механическая характеристики
Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства.
Скоростная и механическая характеристики двигателя определяются равенствами (7) и (9), представленными в статье «Общие сведения о двигателях постоянного тока», при U = const и iв = const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными.
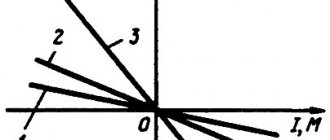
Если щетки находятся на геометрической нейтрали, при увеличении Iа поток Фδ несколько уменьшится вследствие действия поперечной реакции якоря. В результате этого скорость n, согласно выражению (7), представленному в статье «Общие сведения о двигателях постоянного тока», будет стремится возрасти. С другой стороны, падение напряжения Rа × Iа вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис. 1: 1 – при преобладании влияния Rа × Iа; 2 – при взаимной компенсации влияния Rа × Iа и уменьшения Фδ; 3 – при преобладании влияния уменьшения Фδ.
Ввиду того что изменение Фδ относительно мало, механические характеристики n = f(M) двигателя параллельного возбуждения, определяемые равенством (9), представленным в статье «Общие сведения о двигателях постоянного тока», при U = const и iв = const совпадают по виду с характеристиками n = f(Iа) (рисунок 1). По этой же причине эти характеристики практически прямолинейны.
| Рисунок 1. Виды естественных скоростных и механических характеристик двигателя параллельного возбуждения |
Характеристики вида 3 (рисунок 1) неприемлемы по условиям устойчивой работы (смотрите статью «Регулирование скорости вращения и устойчивость работы двигателей постоянного тока»). Поэтому двигатели параллельного возбуждения изготавливаются со слегка падающими характеристиками вида 1 (рисунок 1). В современных высокоиспользованных машинах ввиду довольно сильного насыщения зубцов якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида 1 (рисунок 1) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, намагничивающая сила которой составляет до 10% от намагничивающей силы параллельной обмотки возбуждения. При этом уменьшение Фδ под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей, а двигатель с такой обмоткой по-прежнему называется двигателем параллельного возбуждения.
Изменение скорости вращения Δn (рисунок 1) при переходе от холостого хода (Iа = Iа0) к номинальной нагрузке (Iа = Iан) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2 – 8% от nн. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и прочее).
| Рисунок 2. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения |
Преимущества и недостатки
Из достоинств комбинированных моторов стоит выделить:
- высокие показатели регулировок;
- хороший уровень крутящего момента даже на низких оборотах двигателя;
- точность регулировки, низкая вероятность выхода из-под контроля;
- минимальные потери магнетизма со временем;
- почти линейные и механические параметры регулировки, которые обеспечивают удобство эксплуатации;
- высокий уровень также пускового момента, который способствует быстрому запуску мотора, обладающего таким приводом. Причем, в любых условиях окружающей среды;
- компактность габаритов. Особенно эта особенность касается конструкций устройств с постоянными магнитами;
- возможность применения единого механизма для работы в режиме генератора и двигателя;
- коэффициент полезного действия при работе на максимальных нагрузках, в среднем на 1-3% выше, чем у силовых агрегатов синхронного и асинхронного типа конструкции. Если же нагрузка частичная, тогда показатель может увеличиваться до 15%.
По мере того, как совершенствуется конструкция моторов, расширяется их преимущества также расширяются.
Есть и недостатки, серди которых стоит выделить основной – это высокая рыночная стоимость по сравнению с другими модификациями. Обслуживание также стоит на порядок выше, ведь предотвращать износ конструктивных деталей нужно чаще. Хотя современные инженерные решения помогают исправлять эти недостатки.
Рабочие характеристики
Рабочие характеристики представляют собой зависимости потребляемой мощности P1, потребляемого тока I, скорости n, момента M, и к. п. д. η от полезной мощности P2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рисунке 5.
Одновременно с увеличением мощности на валу P2 растет и момент на валу M. Поскольку с увеличением P2 и M скорость n несколько уменьшается, то M ∼ P2 / n растет несколько быстрее P2. Увеличение P2 и M, естественно, сопровождается увеличением тока двигателя I. Пропорционально I растет также потребляемая из сети мощность P1. При холостом ходе (P2 = 0) к. п. д. η = 0, затем с увеличением P2 сначала η быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря η снова начинает уменьшаться.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Особенности конструкции
Электродвигатель, работающей от сети с неизменной токовой величиной (ДПТ), как и асинхронный или синхронный двигатель с изменяемым напряжением электропитания, содержит два основных блока: неподвижный статор (или индуктор) и вращающийся якорь (или ротор). Статор обеспечивает формирование основного магнитного поля. Его структурная схема содержит:
- станину, выполненную из литой стали;
- главные полюсы, осуществляющие формирование основного магнитного поля;
- дополнительных полюсов, обеспечивающие хорошую коммутацию.
Стальная станина служит надежным основанием электромотора, на котором крепятся все неподвижные элементы. Она также выступает структурным звеном магнитопровода. Главный полюс состоит из шихтованного сердечника, закрепленного на основании болтовым соединением, и катушек цепи. Его изготовляют в массиве или набирают из электротехнической стали. Для формирования требуемого распределения магнитных силовых линий сердечник оснащается полюсным наконечником. В отдельных местах производят двигатель постоянного тока с распределенными компенсационными электропроводами, размещаемыми в пазах сердечников.
Электроцепи главного полюса конструктивно выполняются в виде сосредоточенных катушек и могут питаться либо от сетевого источника, либо от зажимов якорной обмотки. Двигатели постоянного тока с центальным подключением к электропитанию и являются ДПТ независимого возбуждения. Добавочные полюсы аналогично главным содержат индукционные сосредоточенные катушки и сердечник, выполненный в виде массивного цельного изделия.
Устройство подвижной части электропривода – якоря – предусматривает применение:
- зубчатого сердечника, выполненного из листовой электротехнической стали;
- коллектора, собранного из изолированных друг от друга клинообразных медных пластин.
В пазы на лицевой поверхности зубчатого сердечника укладывается электроцепь ротора и коллектора, насаженного на роторный вал. Коллекторный механизм – это полое изделие цилиндрической формы. Соединение проводов якоря с коллекторным блоком производится к каждой медной пластине двумя концами отдельных частей роторной электрообмотки.
На коллекторе, в щеткодержателях размещаются неподвижные щетки, посредством которых роторные проводники соединяются с центральной электрической цепью. Таким образом обеспечивается независимое возбуждение тяговых двигателей. Щеткодержатель представляет собой щеточный аппарат с траверсой, на котором закреплены щеточные пальцы. Траверса крепится к стационарной части и допускает поворот на некоторый угол вокруг оси вала для регулирования положения щеток.
Коллекторные двигатели постоянного тока симметричны и обладают либо вертикальной, либо горизонтальной осью симметрии. Первая проходит посередине главных полюсов, вторая – межполюсного пространства. Поперечная ось носит название геометрической нейтрали приводного агрегата.
Существует и другой тип электродвигателя – вентильно — приводный механизм или бесколлекторный электропривод. Его отличие состоит в замене щеточно-коллекторного узла на полупроводниковый коммутатор. Это позволяет получать практические достоинства: высокий КПД, надежность, широкий диапазон мощности, пожарную безопасность.