В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Какие бывают виды регуляторов?
Существует два вида регуляторов, доступных на сегодняшнем рынке:
- на переменном резисторе,
- электронный (шаговый и подвижный).
Все они обладают разными способами управления скоростью вращения и, посему, эффективность (потребление электроэнергии) у каждого вида отличается. С этой точки зрения, классический регулятор – самый дешевый, но неэффективный. Давайте рассмотрим все три типа.
Регулятор на переменном резисторе
На самом деле этот реостат имеет внутри огромную катушку. Выбирая низкие параметры скорости, мы, по сути, выбираем более высокое сопротивление цепи. Это приводит к снижению потребляемого тока (так как напряжение является фиксированной величиной). Аппараты громоздкие по размеру и недорогие по цене.
Электронный регулятор
Электронные – это новейшие типы из доступных регуляторов на рынке. Они намного меньше по размерам, чем другие. Для понижения напряжения в них используются вместо резисторов конденсаторы, которые регулируя скорость вращения, управляют сигналом электропитания. В отличие от реостатов не нагреваются и, значит, экономят электроэнергию, когда мотор работает на малых скоростях.
Регуляторы способны сэкономить до 40% на «1» скорости и около 30% на «2-й» скорости по сравнению со своими резисторными аналогами. Существуют электронные разновидности регуляторов:
- подвижные с плавным регулированием.
- шаговые с пронумерованной скоростью действия (обычно от 1 до 5).
Эти устройства обеспечивают низкий уровень искажений движения мотора и, следовательно, меньше нагреваются. Вариант с лучшей технологией и экономией электричества.
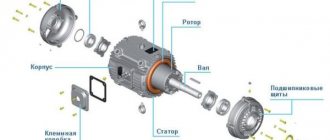
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Мощность и нагрев двигателя
Номинальная мощность обычно указывается для температуры окружающей среды 40°С и ограничена предельной температурой нагрева. Поскольку самым слабым местом в двигателе с точки зрения перегрева является изоляция, мощность ограничивается классом изоляции обмотки статора. Например, для наиболее распространенного класса изоляции F допустимый нагрев составляет 155°С при температуре окружающей среды 40°С.
В документации на электродвигатели приводятся данные, из которых видно, что номинальная мощность двигателя падает при повышении температуры окружающей среды. С другой стороны, при должном охлаждении двигатели могут длительное время работать на мощности выше номинала.
Мы рассмотрели потребляемую и отдаваемую мощности, но следует сказать, что реальная рабочая потребляемая мощность P
(мощность на валу двигателя в данный момент) всегда должна быть меньше номинальной:
Р 2 1
Это необходимо для предотвращения перегрева двигателя и наличия запаса по перегрузке. Кратковременные перегрузки допустимы, но они ограничены прежде всего нагревом двигателя. Защиту двигателя по перегрузке также желательно устанавливать не по номинальному току (который прямо пропорционален мощности), а исходя из реального рабочего тока.
Современные производители в основном выпускают двигатели из ряда номиналов: 1,5, 2,2, 5,5, 7,5, 11, 15, 18,5, 22 кВт и т.д.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Расчет мощности 3-фазного асинхронного агрегата
Чтобы рассчитать полезную мощность на обмотке статора асинхронного 3-фазного двигателя, следует умножить фазное напряжение на фазный ток и на коэффициент мощности, а полученное значение мощности умножить на три (по количеству фаз):
- Pстатора = 3 * Uф * Iф * cosφ.
Расчет мощности эл. двигателя, имеющей активный характер, то есть мощности, которая снимается с вала двигателя, производится так:
- Pвыходная = Pстатора – Pпотерь.
В асинхронном двигателе имеют место следующие потери:
- электрические в обмотке статора;
- в стали сердечника статора;
- электрические в обмотке ротора;
- механические;
- добавочные.
Для расчета мощности трехфазного двигателя в обмотке статора, имеющей реактивный характер, необходимо сложить три составляющие данного типа мощности, а именно:
- реактивную мощность, расходуемую на создание потока рассеяния обмотки статора;
- реактивную мощность, расходуемую на создание потока рассеяния обмотки ротора;
- реактивную мощность, расходуемую на создание основного потока.
Реактивная мощность в асинхронном двигателе в основном расходуется на создание переменного электромагнитного поля, но часть мощности расходуется на создание потоков рассеяния. Потоки рассеяния ослабляют основной магнитный поток и снижают эффективность работы асинхронного агрегата.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Асинхронный двигатель
Асинхронный агрегат – устройство, особенность которого заключается в том, что частота вращения магнитного поля, создаваемого его статором, всегда больше частоты вращения его ротора.
Принцип действия асинхронной машины похож на принцип действия трансформатора. Применяются законы электромагнитной индукции (изменяющееся во времени потокосцепление обмотки наводит в ней ЭДС) и Ампера (на проводник определенной длины, по которому течет ток, находящийся в поле с определенным значением индукции, действует электромагнитная сила).
Асинхронный двигатель в общем случае состоит из статора, ротора, вала и опоры. Статор включает в себя следующие основные составляющие: обмотка, сердечник, корпус. Ротор состоит из сердечника и обмотки.
Основная задача асинхронного двигателя – преобразование электрической энергии, которая подается на обмотку статора, в механическую энергию, которую можно снять с вращающегося вала.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
P = dA ÷ dt, где:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Мощность через объем двигателя
Не всегда есть возможность определить крутящий момент двигателя. Иногда автовладельцы и вовсе не знают значения этого параметра. В таком случае мощность двигательного агрегата можно узнать при помощи объема мотора.
Для этого понадобится умножить объем агрегата на частоту вращения коленвала, а также на среднее эффективное давление. Полученную величину необходимо разделить на 120:
- P = (V * n * Pэффективное)/120 где V – объем двигателя [см3], n – скорость вращения коленвала [об/мин], Pэффективное – среднее эффективное давление [МПА], 120 – константа, коэффициент пропорциональности.
Так производится расчет мощности двигателя автомобиля с помощью объема агрегата.
Чаще всего значение Pэффективное в бензиновых двигателях стандартного образца варьируется от 0,82 МПа до 0,85 МПа, в форсированных моторах – 0,9 МПа, а в дизельных агрегатах значение давления находится в промежутке от 0,9 МПа до 2,5 МПа.
При использовании данной формулы для расчета реальной мощности мотора, чтобы перевести кВт в л. с., необходимо разделить полученную величину на коэффициент, равный 0,735.
Данный метод расчета также далеко не самый сложный и занимает минимум времени и усилий.
С помощью этого метода можно произвести расчет мощности двигателя насоса.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
t = 60 секунд.
Введение
Существует как минимум четыре распространенных способа расчета мощности двигателя внутреннего сгорания. В данных методах применяются следующие параметры двигательного агрегата:
- Обороты.
- Объем.
- Крутящий момент.
- Эффективное давление внутри камеры сгорания.
Для вычислений необходимо знать и вес автомобиля, а также время разгона до 100 км/ч.
Каждая из далее приведенных формул расчета мощности двигателя имеет некоторую погрешность и не может дать на 100% точный результат. Это всегда стоит учитывать при анализе полученных данных.
Если рассчитать мощность по всем формулам, которые будут описаны в статье, можно узнать среднее значение реальной мощности мотора, а расхождение с действительным результатом составит не более 10%.
Если не учитывать различные научные тонкости, связанные с определением технических понятий, то можно сказать, что мощность – это энергия, вырабатываемая двигательным агрегатом и преобразуемая в крутящий момент на валу. При этом мощность – величина непостоянная, а ее максимальное значение достигается при определенной скорости вращения вала (указывается в паспортных данных).
В современных двигателях внутреннего сгорания максимальная мощность достигается при 5,5-6,6 тысяч оборотов в минуту. Она наблюдается при наибольшем среднем эффективном значении давления в цилиндрах. Величина этого давления зависит от следующих параметров:
- качество топливной смеси;
- полнота сгорания;
- топливные потери.
Мощность, как физическая величина, измеряется в Ваттах, а в автомобильной отрасли она измеряется в лошадиных силах. Расчеты, описываемые в методах далее, будут давать результаты в киловаттах, затем их понадобится перевести в лошадиные силы с помощью специального калькулятора-конвертера.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Мощность по габаритам
Статор имеет множество различных составляющих, одна из которых – сердечник. Для расчета мощности двигателя с использованием габаритов следует выполнить следующие действия:
- Измерить длину и диаметр сердечника.
- Вычислить постоянную C, которая будет использована при дальнейшем расчете. C = (π * D * n)/(120 * f), где D – диаметр сердечника, n – скорость вращения вала, f – частота напряжения (чаще всего это промышленная частота 50 Гц).
- Вычислить мощность P по формуле P = C * D2 * l * n * 10-6, где C – вычисленная константа, D – диаметр сердечника, n – скорость вращения вала, l – длина сердечника.
Лучше производить все измерения и вычисления с максимальной точностью, чтобы расчет мощности двигателя электропривода был максимально приближен к действительности.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Мощность через расход воздуха
Мощность агрегата можно определить и по расходу воздуха. Правда, данный метод расчета доступен только тем автовладельцам, у которых установлен бортовой компьютер, позволяющий зафиксировать расход воздуха при 5,5 тысячи оборотов на третьей передаче.
Чтобы получить приблизительную мощность двигателя, необходимо полученный при вышеописанных условиях расход разделить на три. Формула выглядит так:
- P = G/3, где G – расход воздуха.
Данный расчет характеризует работу двигателя в идеальных условиях, то есть без учета потерь на трансмиссию, сторонних потребителей и аэродинамическое сопротивление. Реальная мощность ниже вычисленной на 10 или даже 20%.
Соответственно, величина расхода воздуха определяется в лабораторных условиях на специальном стенде, на который устанавливают автомобиль.
Показания бортовых датчиков сильно зависят от их загрязнения и от калибровки.
Поэтому расчет мощности двигателя на основе данных о расходе воздуха является далеко не самым точным и эффективным, но для получения приблизительных данных он вполне подойдет.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Мощность через массу авто и время разгона до «сотни»
Расчет с применением веса автомобиля и его скорости разгона до 100 км/ч – один из самых простых методов вычисления реальной мощности двигателя, ведь масса авто и заявленное время разгона до «сотни» – паспортные параметры машины.
Этот метод актуален для двигателей, работающих на любых видах топлива – бензин, дизельное топливо, газ – ведь он учитывает лишь динамику разгона.
При расчете стоит учитывать вес транспортного средства вместе с водителем. Также чтобы максимально приблизить результат вычислений к действительному, стоит учесть и потери, затрачиваемые на торможение, пробуксовку, а также скорость реакции коробки передач. Играет роль и тип привода. Например, переднеприводные автомобили теряют на старте около 0,5 секунды, заднеприводные – от 0,3 секунды до 0,4 секунды.
Остается найти в сети калькулятор для расчета мощности авто через скорость разгона, внести необходимые данные и получить ответ. Нет смысла приводить математические расчеты, которые производит калькулятор, из-за их сложности.
Результат вычислений будет одним из самых точных, приближенных к реальному.
Данный метод расчета реальной мощности машины многие считают самым удобным, ведь автовладельцам придется приложить минимум усилий – измерить для чистоты эксперимента скорость разгона до 100 км/ч и внести дополнительные данные в автоматический калькулятор.
Виды асинхронных электродвигателей по их конструктивному исполнению
В зависимости от степени защищенности электродвигатели делятся на:
- Открытые. Они не очень распространены, т.к. не имеют специальных приспособлений, предотвращающих возможность прикосновения к токоведущим и вращающимся механизмам, а также попадания посторонних предметов внутрь агрегата.
- Защищенные. Имеют вышеуказанные приспособления.
- Каплезащищенные. Комплектуются элементами, позволяющими предотвратить попадание внутрь капель воды (при их вертикальном падении).
- Закрытые. Внутренняя полость отделяется особой оболочкой, не позволяющей пыли проникнуть внутрь.
- Взрывозащищенные. Имеют высшую степень защиты и поэтому могут применяться даже во взрывоопасных помещениях.
Кроме того, электродвигатели различаются по типу монтажа: вертикальные, фланцевые, интегрированные и пр.
Как обозначаются электродвигатели различных конструкций
Обычно используются следующие обозначения:
- М101 – устанавливается горизонтально и фиксируется на лапах, приваренных к станине либо составляющих с ней единое целое.
- М201 – также горизонтальная установка, но двигатель подвешивается на лапах, размещенных сверху на станине.
- М301 – фланцевый двигатель с горизонтальной установкой; кольцевой фланец с центрирующей заточкой и отверстиями для болтов расположен на щите подшипника.
- М302 – двигатель устанавливается вертикально (рабочий конец вала располагается в нижней части); закрепляется на подшипниковом щите с помощью фланца.
- М303 – тип установки как у М302, но рабочий конец вала располагается наверху.
- М102 – как М302, но закрепление производится на лапах.
- М103 – как М102, но при установке рабочий конец вала находится сверху.
- М202 – как М302, но закрепление осуществляется фланцем на щите и лапами на станине.
- М203 – как М202, но конец рабочего вала находится в верхней части.
Области применения электродвигателей
Электродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии.
- Электродвигатели используются повсеместно, основные области применения:
- промышленность: насосы, вентиляторы, компрессоры, конвейеры, движущая сила для других машин и др.
- строительство: насосы, вентиляторы, конвейеры, лифты, системы отопления, вентиляции и кондиционирование воздуха и др.
- потребительские устройства: холодильники, кондиционеры, персональные компьютеры и ноутбуки (жесткие диски, вентиляторы), пылесосы, стиральные машинки, миксеры и др.
| ЭД1 | Функции | Области применения |
| Вращающиеся электродвигатели | Насосы | Системы водоснабжения и водоотведения |
| Системы перекачки охлажденной или нагретой воды, системы отопления, ОВК2, системы полива | ||
| Системы канализации | ||
| Перекачка нефтепродуктов | ||
| Вентиляторы | Приточно-вытяжная вентиляция, ОВК2, вентиляторы | |
| Компрессоры | Системы вентиляции, холодильные и морозильные установки, ОВК2 | |
| Накопление и распределение сжатого воздуха, пневматические системы | ||
| Системы сжижения газа, системы перекачки природного газа | ||
| Вращение, смешивание, движение | Прокатный стан, станки: обработка металла, камня, пластика | |
| Прессовое оборудование: обработка алюминия, пластиков | ||
| Обработка текстиля: ткачество, стирка, сушка | ||
| Смешивание, взбалтывание: еда, краски, пластики | ||
| Транспорт | Пассажирские лифты, эскалаторы, конвейеры | |
| Грузовые лифты, подъемные краны, подъемники, конвейеры, лебедки | ||
| Транспортные средства: поезда, трамваи, троллейбусы, автомобили, электромобили, автобусы, мотоциклы, велосипеды, зубчатая железная дорога, канатная дорога | ||
| Угловые перемещения (шаговые двигатели, серводвигатели) | Вентили (открыть/закрыть) | |
| Серво (установка положения) | ||
| Линейные электродвигатели | Открыть/закрыть | Вентили |
| Сортировка | Производство | |
| Хватать и перемещать | Роботы |
Примечание:
- ЭД — электродвигатель
- ОВК — системы отопления, вентиляции и кондиционирование воздуха