Мощность электродвигателя – паспортная характеристика прибора, превращающего электрическую энергию в кинетическую. Это один из ключевых параметров при выборе устройства для обслуживания различного оборудования. Она всегда указывается в сопроводительной документации и дополнительно «штампуется» на шильднике электрического двигателя, закрепленном на его корпусе.
Но документы не всегда сохраняются, а надпись на шильднике может затереться. В таких случаях для дальнейшей эксплуатации, проверки, подключения может потребоваться расчет мощности электродвигателя. Он производится разными способами, о которых и расскажем.
Понятие мощности электродвигателя
Мощность – пожалуй, самый важный параметр при выборе электродвигателя. Традиционно она указывается в киловаттах (кВт), у импортных моделей – в киловаттах и лошадиных силах (л.с., HP, Horse Power). Для справки: 1 л.с. приблизительно равна 0,75 кВт.
На шильдике двигателя указана номинальная полезная (отдаваемая механическая) мощность
. Это та мощность, которую двигатель может отдавать механической нагрузке с заявленными параметрами без перегрева. В формулах номинальная механическая мощность обозначается через Р2.
Электрическая (потребляемая) мощность
двигателя Р1 всегда больше отдаваемой Р2, поскольку в любом устройстве преобразования энергии существуют потери. Основные потери в электродвигателе – механические, обусловленные трением. Как известно из курса физики, потери в любом устройстве определяются через КПД (ƞ), который всегда менее 100%. В данном случае справедлива формула:
Р2 = Р1 · ƞ
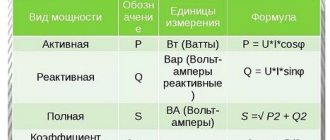
КПД в двигателях зависит от номинальной мощности – у маломощных моделей он может быть менее 0,75, у мощных превышает 0,95. Приведенная формула справедлива для активной потребляемой мощности. Но, поскольку электродвигатель является активно-реактивной нагрузкой, для расчета полной потребляемой мощности S
(с учетом реактивной составляющей) нужно учитывать реактивные потери. Реактивная составляющая выражается через коэффициент мощности (cosϕ). С её учетом формула номинальной мощности двигателя выглядит так:
Р2 = Р1 · ƞ = S · ƞ · cosϕ
Расчет КПД электродвигателя
Онлайн расчет КПД (коэффициента полезного действия) электродвигателя
Расчет КПД трехфазного электродвигателя
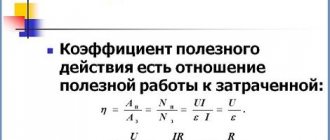
Расчет коэффициента полезного действия электродвигателя производится по следующей формуле:
η=P/√3UIcosφ
где:
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателя либо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствииопределяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
Оказались ли полезны для Вас данные онлайн калькуляторы? Или может быть у Вас остались вопросы? Напишите нам в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
↑ Наверх
7,5
https://elektroshkola.ru/kalkulyatory/onlajn-raschet-xarakteristik-trexfaznyx-elektrodvigatelej/
Мощность и нагрев двигателя
Номинальная мощность обычно указывается для температуры окружающей среды 40°С и ограничена предельной температурой нагрева. Поскольку самым слабым местом в двигателе с точки зрения перегрева является изоляция, мощность ограничивается классом изоляции обмотки статора. Например, для наиболее распространенного класса изоляции F допустимый нагрев составляет 155°С при температуре окружающей среды 40°С.
В документации на электродвигатели приводятся данные, из которых видно, что номинальная мощность двигателя падает при повышении температуры окружающей среды. С другой стороны, при должном охлаждении двигатели могут длительное время работать на мощности выше номинала.
Мы рассмотрели потребляемую и отдаваемую мощности, но следует сказать, что реальная рабочая потребляемая мощность P
(мощность на валу двигателя в данный момент) всегда должна быть меньше номинальной:
Р 2 1
Это необходимо для предотвращения перегрева двигателя и наличия запаса по перегрузке. Кратковременные перегрузки допустимы, но они ограничены прежде всего нагревом двигателя. Защиту двигателя по перегрузке также желательно устанавливать не по номинальному току (который прямо пропорционален мощности), а исходя из реального рабочего тока.
Современные производители в основном выпускают двигатели из ряда номиналов: 1,5, 2,2, 5,5, 7,5, 11, 15, 18,5, 22 кВт и т.д.
Нормируемые требования к показателям
В РФ требования к качеству работы энергосистемы стандартизированы.
В соответствии с ГОСТ 13109-97 частота в энергосистеме должна непрерывно поддерживаться на уровне f = 50 ± 0,2 Гц, при этом допускается кратковременное отклонение частоты до значения ∆f = 0,4 Гц.
Анализируя зависимость силы тока от частоты, можно сделать вывод, что если подключаемая нагрузка имеет чисто активный характер (к примеру, резистор), то в широком диапазоне сила тока от частоты иметь зависимость не будет. В случае достаточно высоких частот, когда индуктивность и ёмкость подключаемой нагрузки будут характеризоваться сопротивлением, сравнимым с активным, то сила тока будет иметь определенную зависимость от частоты.
Другими словами, при варьировании частоты тока происходит изменение ёмкостного сопротивления, изменение которого, в свою очередь, приводит к изменению тока, протекающего по цепи.
То есть при повышении частоты, снижается ёмкостное сопротивление, и повышается ток, протекающий по цепи.
Математическое выражение зависимости будет иметь следующий вид: I = UCω;
Зависимость при учете активного сопротивления будет определяться следующим выражением: I (ω) = UCω √(R2 • C2 • ω2 + 1).
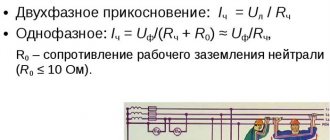
Расчет мощности двигателя на основе измерений
На практике мощность двигателя можно рассчитать, прежде всего, исходя из рабочего тока. Ток измеряется токовыми клещами в максимальном рабочем режиме, когда рабочая мощность приближается к номинальной. При этом температура корпуса двигателя может превышать 100 °С, в зависимости от класса нагревостойкости изоляции.
Измеренный ток подставляем в формулу для расчета реальной механической мощности
на валу:
Р = 1,73 · U · I · cosϕ · ƞ
, где
- U – напряжение питания (380 или 220 В, в зависимости от схемы подключения – «звезда» или «треугольник»),
- I – измеренный ток,
- cosϕ и ƞ – коэффициент мощности и КПД, значения которых можно принять равными 0,8 для маломощных двигателей (менее 5,5 кВт) или 0,9 для двигателей мощностью более 15 кВт.
Если нужно найти номинальную мощность
двигателя, то полученный результат округляем в бОльшую сторону до ближайшего значения из ряда номиналов.
Р2 > Р
Если необходимо рассчитать потребляемую активную мощность
, используем следующую формулу:
Р1 = 1,73 · U · I · ƞ
Именно активную мощность измеряют счетчики электроэнергии. В промышленности для измерения реактивной (и полной мощности S) применяют дополнительное оборудование. При данном способе можно не использовать приведенную формулу, а поступить проще – если двигатель подключен в «звезду», измеренное значение тока умножаем на 2 и получаем приблизительную мощность в кВт.
Что важнее: мощность или крутящий момент?
Want create site? Find Free WordPress Themes and plugins.
Многие считают, что самая важная характеристика любого электродвигателя — это мощность. Про такой важный параметр, как «крутящий момент», не все слышали и не все понимают его важность для тяговых электроприводов.
График зависимости мощности (P) и крутящего момента (M) от оборотов (n), где: Мном — номинальный крутящий момент (в режиме S1), Н*м; Ммакс — максимальный крутящий момент (в режиме S2), Н*м; Pном – номинальная мощность (в режиме S1), кВт; Pмакс – максимальная мощность (в режиме S2), кВт; N – номинальные обороты, об/мин
Из графика зависимости мощности синхронного электродвигателя от оборотов видно, что его мощность не является постоянной величиной, но в рабочем диапазоне оборотов линейно растёт по мере увеличения оборотов. Для точного определения мощности (P) электродвигателя в качестве его технической характеристики выбирается оптимальная точка на графике, которая определяет номинальную мощность (Pном) на номинальных оборотах (N).
Увеличивая номинальные обороты синхронного электродвигателя, можно пропорционально увеличивать его номинальную мощность, что, в свою очередь, приводит и к росту удельной мощности.
В погоне за мощностью
Большинство проектировщиков и изготовителей электрических машин стараются достичь высокой мощности путём увеличения номинальных оборотов до нескольких тысяч или даже десятков тысяч оборотов в минуту. Однако, по мере увеличения оборотов электрической машины лавинообразно нарастают сразу несколько неприятных проблем: начиная с механической балансировки ротора и заканчивая высокочастотными потерями в статоре. Основные высокочастотные проблемы — это так называемый «скин-эффект» в обмотках, вихревые токи Фуко в сердечнике и быстродействие силовых ключей частотных преобразователей. Преодоление этих проблем приводит к существенному увеличению стоимости электродвигателя.
Вращающая сила
Для тяговых электроприводов необходимо, в первую очередь, обеспечить требуемую вращающую силу, которую называют также «моментом силы» или «крутящим моментом» (М). В таких системах вращающая сила должна достигать максимальных значений, начиная со старта.
В отличие от асинхронных, именно у синхронных электродвигателей номинальный и максимальный крутящие моменты остаются постоянными во всём рабочем диапазоне оборотов. Постоянный номинальный крутящий момент — одно из важнейших преимуществ синхронных электродвигателей и обеспечивается даже на минимальной мощности. На графике соответствующие крутящие моменты обозначены «Mном» и «Ммакс».
К сожалению, в реальных условиях увеличение номинальных оборотов электродвигателя приводит к уменьшению удельного крутящего момента (M). Если хочется получить минимальные масса-габариты электродвигателя, то придётся выбирать между концепциями высокой удельной мощности за счёт высоких оборотов и высоким удельным крутящим моментом на малых или сверх-малых оборотах.
Преобразование мощности в крутящий момент
Перед создателем любого тягового электропривода с применением высокооборотного электродвигателя возникает необходимость преобразования мощности в крутящий момент, сопровождающийся переходом от высоких оборотов к низким. Такое преобразование осуществляется с помощью механического редуктора.
Однако, применение редуктора приводит к неизбежному увеличению сложности, масса-габаритов и стоимости электропривода на фоне снижения КПД, надёжности и рабочего ресурса. Если речь идёт о сервоприводе, то любой механический редуктор, кроме всего прочего, снижает точность позиционирования.
Избавляемся от редуктора!
Применение тяговых синхронных электродвигателей с высоким удельным крутящим моментом позволяет существенно снизить коэффициент редукции или полностью отказаться от механического редуктора, обеспечив переход на прямой привод со всеми вытекающими отсюда преимуществами.
Удельный крутящий момент синхронных электродвигателей серий и iEM в 5-10 раз выше, чем у аналогичных по мощности асинхронных и коллекторных электродвигателей! Столь высокий крутящий момент электродвигателей /iEM позволяет либо существенно снизить коэффициент редукции, либо полностью отказаться от механического редуктора!
Благодаря запатентованным технологиям, синхронные электродвигатели серий /iEM в 2-5 раз компактнее и легче других синхронных (в том числе, «вентильных») и коллекторных электродвигателей с таким же крутящим моментом!
Режим постоянной мощности
На графике зависимости мощности и крутящего момента от оборотов видно, что при превышении номинальных оборотов (N) синхронного электродвигателя его крутящий момент (M) начинает снижаться. Также падает и КПД. Это происходит потому, что практически любая электрическая машина обратима, и может одновременно работать как электродвигатель и как электрогенератор. При превышении номинальных оборотов, вырабатываемое электродвигателем напряжение начинает «бороться» с питающим напряжением от частотного преобразователя. Чем больше увеличиваются обороты относительно номинальных, тем сильнее электродвигатель влияет на источник питания, снижая КПД и крутящий момент электропривода.
На практике превышение оборотов на 20-30% относительно номинальных далеко не всегда рассматриваются как нежелательный или запрещённый диапазон для синхронного электропривода. Например, в электротранспорте диапазон оборотов, превышающий номинальные, часто используется для кратковременного достижения максимальной скорости, когда фактор экономичности временно отходит на задний план. При этом, современные частотные преобразователи хорошо умеют справляться с такой ситуацией, и автоматически переходят в режим обеспечения «постоянной мощности«.
Таким образом, оптимальный выбор номинальных оборотов (N), а также допустимость и степень их превышения для конкретного синхронного электропривода — это продуманное решение разработчика электропривода, основывающееся на конкретных приоритетах.
Did you find apk for android? You can find new Free Android Games and apps.
Предыдущая
|
Следующая
Расчет мощности при помощи счетчика электроэнергии
Этот способ прост и не требует дополнительных инструментов и знаний. Достаточно подключить двигатель через счетчик (трехфазный узел учета) и узнать разницу показаний за строго определенное время. Например, при работе двигателя в течении часа разница показаний счетчика будет численно равна активной мощности двигателя (Р1). Но чтобы получить номинальную мощность Р2, нужно воспользоваться приведенной выше формулой.
Другие полезные материалы:
Степени защиты IP Трехфазный двигатель в однофазной сети Типичные неисправности электродвигателей
Посчитать потребляемую мощность двигателя
Предлагаем определить тип двигателя. Помогает сделать шильдик. Указывается полная мощность (реактивная плюс активная, соединенные через косинус угла сдвига фаз, называемый коэффициентом мощности). Если известен тип двигателя (выяснили, руководствуясь изображениям, внешним видом), справочники позволят найти мощность. Неудивительно: габариты тесно связаны с параметром, каждый производитель максимально хочет экономить выпуском продукции. Размеры оптимизированы, типичный набор параметров следующий:
- Диаметр вала.
- Высота оси от основания (станины).
Двигатели АИР описаны, размеры, мощность указаны здесь: https://wp.electrostal.com.ua/kakoy-diametr-vala-u-elektrodvigatelya/. Соответственно, можно без инструментов понять детали. Увидите, аналогичного рода информация отыщется практически на любые типы моторов. Шильдик сорван, можно некоторое время потратить, отыскивая похожие модели в интернете. Россия уступает Китаю разнообразием электрических двигателей. Шанс успеха высок.
Полагаем, перечислили доступные способы определения мощности, тока, невелика проблема потратить 1000 рублей, получая нужные средства. Учитывая, что рубль сгорает, шаг будет казаться разумным. Проще определить мощность электродвигателя, пользуясь справочником. Требуется знать модель, вал измерите штангенциркулем.
Заканчиваем обзор, надеемся, постоянные читатели знают отличия асинхронного двигателя от коллекторного. Различия опускаем
Обратите также внимание: большим пусковым током страдают асинхронные двигатели. У коллекторных разброс невысок
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току. Заказать новый электродвигатель по телефону
Распространенные схемы регуляторов
Существует множество частотных преобразователей для асинхронных двигателей, а также различных регуляторов для них. Самостоятельно возможно изготовить прибор для регулировки частоты, применяя транзисторы или тиристоры. Прибор работает как в быту, так и для станочного оборудования, крановых механизмов, различных регулируемых приводов агрегатов.
Мощный регулятор частоты и напряжения показан на схеме. Прибор плавно изменяет параметры привода, экономит энергию, снижает расходы на обслуживание.
Для применения этой схемы в быту, она сложная. Если использовать симистор рабочим элементом, то схема упрощается, и выглядит иначе.
Регулировка будет происходить работой потенциометра, определяюцим фазу импульса входа, и открывающего симистор.
Эффект эксплуатации станков, обрабатывающих металл, подъемных устройств также следует из вращения двигателя, как и сами его эксплуатационные параметры. В продаже имеется множество приборов для регулировки частоты, однако можно вполне собрать такой прибор собственными силами.
Ранние разработки
В 1821 году, после открытия феномена связи электричества и магнетизма, датским химиком Эрстедом, теоремы Ампера и закона Био — Савара, английский физик Майкл Фарадей построил два аппарата, которые он назвал «электромагнитное вращение»: непрерывное круговое движение магнитной силы вокруг провода — это фактическая демонстрация первого электродвигателя.
В 1822 году Питер Барлоу построил то, что можно считать первым электродвигателем в истории: «колесо Барлоу». Это устройство представляет собой простой металлический диск, нарезанный звездой, и концы которого погружаются в чашку, содержащую ртуть, обеспечивающая текущий поток. Однако он создает только силу, способную ее поворачивать, не допуская ее практического применения.
Первый экспериментально используемый коммутатор был изобретен в 1832 году Уильямом Стерджоном. Первый двигатель постоянного тока, изготовленный с целью продажи, был изобретен Томасом Давенпортом в 1834 году и запатентован в 1837 году. Эти двигатели не испытали никакого промышленного развития из-за высокой стоимости батарей в то время.
Электродвигатель с DC
Коммутируемый аппарат постоянного тока имеет набор вращающихся обмоток, намотанных на якорь, установленный на вращающемся валу. На валу также имеется коммутатор, долговременный поворотный электрический выключатель, который периодически меняет поток тока в обмотках ротора при вращении вала. Таким образом, каждый мостовой мотор постоянного тока имеет переменный ток, проходящий через вращающиеся обмотки. Ток протекает через одну или несколько пар щеток, которые несут на коммутаторе; щеточки соединяют внешний источник электроэнергии с вращающейся арматурой.
Вращающаяся арматура состоит из одной или нескольких катушек проволоки, намотанной вокруг ламинированного ферромагнитного сердечника. Ток от щетки протекает через коммутатор и одну обмотку якоря, делая его временным магнитом (электромагнитом). Магнитное поле, создаваемое якорем, взаимодействует со стационарным магнитным полем, создаваемым либо PM, либо другой обмоткой (полевой катушкой), как часть каркаса двигателя.
Сила между двумя магнитными полями имеет тенденцию вращать вал двигателя. Коммутатор переключает питание на катушки при повороте ротора, удерживая магнитные полюса, от когда-либо полностью совпадающего с магнитными полюсами поля статора, так что ротор никогда не останавливается (как стрелка компаса), а скорее вращается пока есть питание.
Хотя большинство коммутаторов являются цилиндрическими, некоторые из них представляют собой плоские диски, состоящие из нескольких сегментов (как правило, не менее трех), установленных на изоляторе.
Большие щетки желательны для большей площади контакта щетки, для максимизации мощности двигателя, но небольшие щеточки желательны для малой массы, чтобы максимизировать скорость, с которой двигатель может работать, без чрезмерного отскока и искрения щеток. Более жесткие пружины для щеток также могут использоваться для создания щеток заданной массы на более высокой скорости, но за счет больших потерь из-за трения и износа ускоренной щетки и коммутатора. Поэтому конструкция электродвигателя постоянного тока влечет за собой компромисс между выходной мощностью, скоростью и эффективностью/износом.
Конструкция двигателей с DC:
- Схема арматуры — обмотка, в ней переносится ток нагрузки, который может быть неподвижной или вращающейся частью двигателя или генератора.
- Полевая схема — набор обмоток, создающих магнитное поле, так что электромагнитная индукция может существовать в электрических машинах.
- Коммутация. Механическая техника, в которой может быть достигнута ректификация, или благодаря чему может быть получен постоянный ток.
Существует четыре основных типов электродвигателей постоянного тока:
- Электродвигатель с шунтовой намоткой.
- Электродвигатель постоянного тока.
- Комбинированный двигатель.
- Двигатель PM.
https://youtube.com/watch?v=sCVZ7tsluC8
Типы двигателей
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.
Главный недостаток электродвигателей постоянного тока — возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
Синхронные электродвигатели
Синхронные двигатели — оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок — до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
Обозначения основных монтажных и присоединительных размеров двигателей
Условные обозначения габаритных размеров:
- h — высота вращения вала или габарит электродвигателя. Высота от центра оси вала до земли. Важный присоединительный размер при сборе агрегата и центровке
- l30*h31*d24 — длина, высота, ширина электродвигателя АИР, размеры по габаритам. Необходимы для калькуляции цены доставки и необходимого места при транспортировке
- m — вес электродвигателя, масса. Нужен для расчета транспортных издержек и сопромата
- d1 — диаметр вала. Габаритно-присоединительный размер АИР, необходимый при агрегатировании с другим оборудованием или подбора полумуфты
- d20 — ширина, крепежный диаметр фланца. d22 — диаметр отверстий фланца. Габаритный размер для изготовления или подбора ответного фланца
- l10 и b10 – расстояние между крепежными отверстиями на лапах электродвигателя. Важный габаритно-установочный размер, необходимый при монтаже электродвигателя к станине или на платформу
- L1 – длина вала
- b1 – ширина шпонки. Размер необходим для изготовления полумуфты
Монтажное исполнение – фланец, лапы, комбинированное
Присоединительный и габаритный чертеж монтажного исполнения электродвигателя АИР на лапах (IM 1081), лапы-фланец (IM 2081), чистый фланец (IM 3081).