Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.
Реле
При помощи обычного реле можно просто включать и выключать мотор по команде digitalWrite(пин, состояние), прямо как светодиод:
При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:
Купить модуль реле можно Реле aliexpress, aliexpress, искать
Мосфет
Полевой транзистор, он же мосфет, позволяет управлять скорость вращения мотора при помощи ШИМ сигнала. При использовании мосфета обязательно нужно ставить диод, иначе индуктивный выброс с мотора очень быстро убьёт транзистор. Скорость мотора можно задавать при помощи ардуиновской analogWrite(пин, скорость).
Вместо “голого” мосфета можно использовать готовый китайский модуль:
Купить мосфет модуль можно на Aliexpress: Мосфет модуль aliexpress, aliexpress, искать
Реле и мосфет
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора:
Специальный драйвер
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | ~Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить |
| L9110S | 2.5-12V | 0.8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:
Пины направления управляются при помощи digitalWrite(pin, value), а PWM – analogWrite(pin, value). Управление драйвером по двум пинам может быть двух вариантов:
// === первый тип, встречается чаще всего === // вперёд digitalWrite(pinA, 0); analogWrite(pinB, value); // value 0.. 255 // назад digitalWrite(pinA, 1); analogWrite(pinB, 255 — value); // value 0.. 255 // === второй тип, например большой драйвер === // вперёд digitalWrite(pinA, 0); analogWrite(pinB, value); // value 0.. 255 // назад digitalWrite(pinA, 1); analogWrite(pinB, value); // value 0.. 255 // разница в том, что ШИМ не нужно инвертировать как 255 — значение!
Помехи и защита от них
Индуктивный выброс напряжения
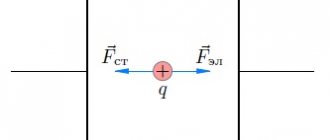
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки. Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства. Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
- При работе с драйвером и управлением в обе стороны диод ставить не нужно и даже нельзя!
- При управлении ШИМ сигналом рекомендуется ставить быстродействующие диоды (например серии 1N49xx) или диоды Шоттки (например серии 1N58xx).
- Максимальный ток диода должен быть больше или равен максимальному току мотора.
- Защитный диод, принимающий на себя обратный выброс ЭДС самоиндукции, также называется шунтирующим диодом, снаббером, flyback диодом.
- В природе существуют мосфеты со встроенным защитным диодом. Этот диод является отдельным элементом и такой мосфет обычно имеет нестандартный корпус, читайте документацию на конкретный транзистор.
- Диод, который показан на схематическом изображении мосфета, не является защитным диодом: это слабый и медленный “паразитный” диод, образованный при производстве транзистора. Он не защитит мосфет от выброса, нужно обязательно ставить внешний!
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0.1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор.
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора. Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.
1Что такое драйвер двигателей и для чего он нужен
Максимальный ток на выводах Arduino слаб (около 50 мА) для такой мощной нагрузки как электромотор (десятки и сотни миллиампер). Поэтому напрямую к выводам Arduino подключать электродвигатель нельзя: есть риск сжечь вывод, к которому подключён двигатель. Для безопасного подключения электродвигателей разных типов к Arduino необходим самодельный или промышленно изготовленный т.н. драйвер двигателей. Драйверы двигателей бывают разные, для их работы часто используются микросхемы типа HG788, L9110S, L293D, L298N и другие. Драйверы двигателей имеют выводы подачи питания, выводы для подключения электродвигателей, а также управляющие выводы.
Различные варианты исполнения драйверов двигателей
В данной статье мы будем использовать драйвер для управления двигателями, сделанный на основе микросхемы L9110S. Обычно выпускаются платы, которые поддерживают подключение нескольких двигателей. Но для демонстрации мы обойдёмся одним.
Важные страницы
- Набор GyverKIT – большой стартовый набор Arduino моей разработки, продаётся в России
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с AliExpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макросы, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
- Поддержать автора за работу над уроками
- Обратная связь – сообщить об ошибке в уроке или предложить дополнение по тексту ([email protected])
4.6 / 5 ( 10 голосов )
2Схема подключения коллекторного двигателяи драйвера двигателей к Arduino
Самые простые электродвигатели – коллекторные двигатели. У таких моторов всего два управляющих контакта. В зависимости от полярности приложенного к ним напряжения меняется направление вращения вала двигателя, а величина приложенного напряжения изменяет скорость вращения.
Давайте подключим двигатель по приложенной схеме. Питание драйвера двигателя – 5 В от Arduino, для управления скоростью вращения ротора мотора управляющие контакты подключаем к выводам Ардуино, поддерживающим ШИМ (широтно-импульсную модуляцию).
Схема подключения коллекторного двигателя к Arduino с помощью драйвера двигателей
Должно получиться что-то подобное:
Двигатель подключён к драйверу двигателей и Arduino
В этом уроке используется:
| Arduino Uno: | Купить |
| Инфракрасный дальномер: | Купить |
| Высокоточный лазерный дальномер с I2C: | Купить |
| Набор резисторов из 100 штук на все случаи: | Купить |
| Небольшой моторчик: | Купить |
| Слабенький сервопривод: | Купить |
| Мощный сервопривод: | Купить |
| Мосфет транзистор для управления переменным током высокого напряжения: | Купить |
| Набор npn транзисторов из 100 штук: | Купить |
3Скетч для управления коллекторным двигателем
Напишем скетч для управления коллекторным двигателем. Объявим две константы для ножек, управляющих двигателем, и одну переменную для хранения значения скорости. Будем передавать в последовательный порт значения переменной Speed и менять таким образом скорость (значением переменной) и направление вращения двигателя (знаком числа).
int Speed = 0; const int IA1 = 5; // Управляющий вывод 1 const int IA2 = 6; // Управляющий вывод 2
void setup() {
pinMode(IA1, OUTPUT); pinMode(IA2, OUTPUT); Serial.begin(9600);
} void loop() {
if (Serial.available() > 0) { String s = Serial.readString(); Speed = s.toInt(); // преобразуем считанную строку в число } if (Speed > 0) { // если число положительное, вращаем в одну сторону analogWrite(IA1, Speed); analogWrite(IA2, LOW); } else { // иначе вращаем ротор в другую сторону analogWrite(IA1, LOW); analogWrite(IA2, -Speed); }
}
Максимальная скорость вращения – при наибольшем значении напряжения, которое может выдать драйвер двигателя. Мы можем управлять скоростью вращения, подавая напряжения в диапазоне от 0 до 5 Вольт. Так как мы используем цифровые ножки с ШИМ, напряжение на них регулируется командой analogWtirte(pin, value), где pin – номер вывода, на котором мы хотим задать напряжение, а аргумент value – коэффициент, пропорциональный значению напряжения, принимающий значения в диапазоне от 0 (напряжение на выводе равно нулю) до 255 (напряжение на выводе равно 5 В).
Загрузим скетч в память Arduino. Запустим его. Вал двигателя не вращается. Чтобы задать скорость вращения, нужно передать в последовательный порт значение от 0 до 255. Направление вращения определяется знаком числа.
Подключимся с помощью любой терминалки к порту, передадим число «100» – двигатель начнёт вращаться со средней скоростью. Если подадим «минус 100», то он начнёт вращаться с той же скоростью в противоположном направлении.
Управление электромотором с помощью драйвера двигателей и Arduino
А вот так выглядит подключение подключение коллекторного двигателя к Arduino в динамике:
Двигатель постоянного тока
Википедия говорит, что Электродвигатель постоянного тока (ДПТ) — это электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
То есть, из электричества мы получаем механическое движение.
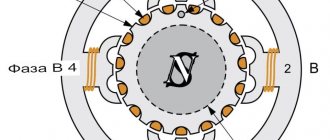
Схема электродвигателя
При подаче напряжения ток проходит сквозь обмотку возбуждения. У смежных полюсов возникает противоположная полярность, в результате образуется магнитное поле.
На якорь двигателя через коллектор подаётся постоянный ток, на который со стороны магнитного поля статора действует электромагнитная индукция.
В результате создаётся вращающий момент, поворачивающий ротор на 90 электрических градусов. После этого щёточно-коллекторный узел коммутирует обмотки ротора, чтобы вращение продолжалось.
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
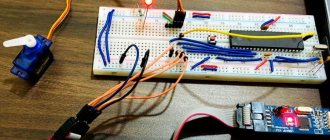
Программа и схема
Сегодня попробуем собрать простейшую схему, не будем использовать драйверы и микросхемы, чтобы управлять мотором. А просто подключим моторчик к Ардуино, чтобы включать и выключать его. Поскольку наш мотор работает от 5+ вольт, то дополнительное питание так же не потребуется. А включать мотор из скетча будем так же, как и светодиоды. Используя простую команду digitalWrite()
Принципиальная схема подключения мотора
Раскручиваем и останавливаем электродвигатель