Реализация технологического процесса предполагает использование различного оборудования. В некоторых случаях надо добиться синхронного и синфазного вращения осей различных устройств. Иногда по каким-то причинам механическое соединение не представляется возможным. Тогда вместо муфты используют сельсин — специальный датчик, благодаря которому можно добиться требуемой синхронизации. Он нередко входит в состав специальных систем, нуждающихся в повороте на некоторый угол на расстоянии. Сельсин работает в режиме приемника и передающего элемента. Стоит детально разобраться, что это такое, как работает и где может использоваться.
Виды синхронной связи
Прежде чем начать разбираться, что такое и как функционируют сельсины, стоит познакомиться с существующими разновидностями синхронной связи. По данному параметру системы принято делить на системы асинхронного вращения и поворота. Каждая разновидность имеет свои особенности.
Синхронное вращение
В состав входит два одинаковых асинхронных электродвигателя, оснащенных фазными роторами. Обмотки ротора соединяют. Статор подключают к 380 В.
Синхронный поворот
В состав входят сельсины, исполнение которых допускает самосинхронизацию. В зависимости от числа фаз они подразделяются на:
- Трехфазные, чья конструкция полностью соответствует асинхронным двигателям. Область использования таких устройств ограничена из-за наличия разницы между моментами синхронизации при повороте ротора;
- Однофазные, близкие по конструктивному исполнению к машинам синхронного типа с минимальной мощностью. Обмотка возбуждения подобного оборудования работает только при пропускании переменного тока.
Посмотрите видео в конце, чтобы разобраться в особенностях подобной системы.
Для чего служит сельсин датчик и что это такое
Всем кто хотел бы выяснить, что это такое сельсин датчик, необходимо подробно ознакомиться с его устройством и принципом действия. Для этого, прежде всего, следует понять, что он представляет собой разновидность электрических устройств, работающих только на переменном токе.
Дополнительная информация: Мощность этих приборов варьируется от нескольких единиц до сотен ватт (но не более киловатта).
Лучший способ понять, что такое сельсин датчик – это разобраться с его назначением. После ознакомления с этим вопросом выясняется, что он позволяет отслеживать поведение подвижных частей двух устройств, удаленных на определенное расстояние. Такая возможность позволяет согласовывать их вращение в отсутствие механической связи (электрическим путем – по проводам). Другими словами, сельсиновые датчики это электрически синхронизированные передающие и приемные устройства.
Системы синхронного поворота: основные режимы
Сельсины работают в двух режимах. Каждый из них имеет свои особенности которые надо обязательно учитывать при выборе оборудования.
Индикаторный
Если оборудование работает в данном режиме, значит, ротор принимающего устройства подсоединен к ведомой оси. Схема актуальна при выборе для ведомой оси минимального момента торможения и размещение на ней индикаторной стрелки. Обмотки возбуждения подключают к общей цепи. Синхронизирующие объединяют с линией связи.
Формируемые магнитные потоки инициируют возникновение ЭДС на обмотках всех фаз. Незначительная рассогласованность приводит к протеканию электротока. Благодаря потоку в датчиках и принимающем элементе сельсина образуются разнонаправленные моменты. С их помощью удается полностью нивелировать угол рассогласования.
Ротор, располагающийся на датчике, затормаживают. Как итог, момент синхронизации влияет на механизм, поворачивающий ведущую ось. Благодаря подобному конструктивному исполнению удается обеспечить одновременный поворот на одинаковый угол роторов обоих подключенных элементов.
Трансформаторный
Электросигнал, появляющийся при рассогласованности роторов, сначала поступает на усиливающую часть схемы. Далее — на ротор исполнительного механизма. Последний начинает поворачивать ротор принимающего элемента и ведомую ось до полного нивелирования имеющейся разницы. Подобный режим актуален при прикладывании к ведомой оси момента торможения, имеющий достаточно большую величину. То есть помогает повернуть механизм.
Обмотку датчика соединяют с ведущей осью и подключают к электросети на 220 В. Для подачи напряжения на элемент, отмечающий за управление двигателем, задействуют усилитель. Обмотку приемника используют для присоединения сельсина. Для объединения обмоток синхронизации двух сельсинов используется линия связи. В возбуждающей обмотке индуцируется ток, создающий в синхронизирующей обмотке ЭДС.
Ток протекает по обоим элементам, так как их обмотки соединены. В принимающем элементе формируются магнитные импульсы. Если элементы рассогласованы, под действием потока в обмотке возникает ЭДС. На входе появляется напряжение, запускающее специальный усиливающий элемент. От него напряжение поступает на статор, принадлежащий исполнительному устройству. Это приводит к тому, что ведомая ось начинает поворачиваться следом за ротором приемника. По мере устранения имеющейся разницы, напряжение становится равным нулю, и вращение ведомой оси прекращается.
Особенности используемой технологии и конструкция влияют на величину погрешности. К таковым относят:
- Разность между параметрами датчика и принимающего устройства;
- Неравномерные показатели магнитной проводимости;
- Отсутствие симметричности у обмоток.
При передаче угла неизбежно возникают погрешности. Их появление обусловлено определенными условиями эксплуатации. При изменении величины сопротивления в сети управления, порядок работы сельсинов изменится.
Схема и принцип действия
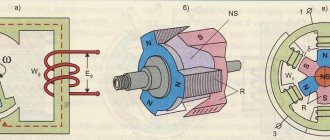
На предложенных схемах изображены различные варианты включения (как датчика, как приемника и в качестве дифференциального устройства).
После их анализа можно сделать следующие выводы:
- Как датчики, так и приемники своими статорными обмотками напрямую подсоединяются к питающей сети.
- Их 3-х катушечные роторные обмотки объединены линейными электрическими связями.
- За счет такого включения при повороте первичного ротора на заданный угол аналогичный узел приемника повернется на тот же градус.
- Если вращать подвижную часть датчика с фиксированной скоростью – с той же частотой будет крутиться соответствующий узел приемника.
В основу данного эффекта заложен принцип э/м индукции, суть которого состоит в способности обмотки с переменным током наводить поле в близко расположенной катушке (на схеме – вариант «а»).
Важно! Индуцировать стороннее поле способен только меняющийся по величине или фазе (то есть переменный) ток.
Величина наводимого в катушке статора ЭДС зависят от ее удаления от роторных обмоток. В случае, когда вращающиеся части двух приборов (приемного и передающего) разнесены от своих статоров на равное расстояние – наблюдается интересный эффект. Он состоит в том, что в этой ситуации токи в роторных контурах равны и противоположны по направлению, что приводит к обнулению их результирующей. Следствием этого является пропадание вращающего момента на валах обоих сельсинов (они неподвижны)!
Конструкция
Исполнение сельсинов диктует их принцип действия. Принято выделять:
- контактные, у которых для соединения обмотки ротора и внешней цепи используются щетки и контактные кольца;
- бесконтактные, в составе которых нет контактных элементов.
Каждая разновидность имеет свои отличительные особенности, с которым стоит обязательно ознакомиться, чтобы понять принцип работы.
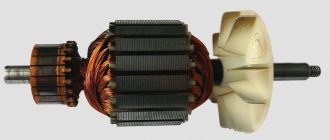
Контактные
Контактные по своему исполнению аналогичны асинхронным электродвигателям с фазным ротором и малой мощностью. В их состав входят неявнополюсные ротор и статор. Благодаря этому обе обмотки – распределенные. У ротора предусмотрена обмотка возбуждения. Для подвода электротока используются два кольца.
У отдельных моделей уже имеется статор и ротор. Это их явное преимущество. В результате величина момента синхронизации возрастает. Однако контактные элементы в этом случае — явный недостаток.
Бесконтактные
Для их включения не нужны никакие контактные элементы. Обе обмотки изначально устанавливаются на статоре. Ротор имеет характерную цилиндрическую форму. Для его изготовления используется материал, имеющие ферримагнитные свойства. Алюминиевая прослойка делит роток на два полюса.
Торообразные сердечники располагаются на торцах сельсинов. Их внутренняя часть располагается над ротором. Наружная соединяется со стержнями внешнего магнитопровода. Для изготовления сердечников используется электротехническая листовая стали. Однофазная обмотка устройства состоит из двух дисковых катушек, располагающихся по обеим сторона статора между сердечниками и обмоткой синхронизации.
В процессе работы устройства происходит замыкание магнитного потока импульсного типа. Трехфазная синхронизирующая обмотка соединяется на статоре. Положение оси потока магнитной индукции по мере изменения пространственного положения ротора изменяется. Он занимает иное положение относительно синхронизирующих обмоток. Величина возникающей ЭДС напрямую зависит от величины угла, на который смог повернуться ротор.
К недостаткам подобных устройств является не такое эффективное использование активных материалов. Кроме того, они в среднем на 50% тяжелее контактных аналогов, что обусловлено большими воздушными зазорами. Благодаря последним, величина токов намагничивания возрастает.
Типы сельсиновых датчиков
Любой действующий сельсин включает в свой состав такие обязательные элементы, как статор и ротор, выполненные в виде обмоток с электромагнитной связью. Известны следующие разновидности электротехнических устройств, отличающиеся количеством катушек, расположенных в статоре и роторе. Они могут быть представлены следующими сочетаниями:
В последнем случае количество обмоток в обеих частях полностью совпадает.
По своему практическому применению (использованию в электронных схемах авторегулировки) эти приборы делятся на следующие виды:
- устройства-датчики;
- сельсины-приемники;
- приборы дифференциального типа.
Содержание
Сельсины и системы дистанционной передачи угла поворота подразделяются на две группы: трёхфазные силовые и однофазные.
Трёхфазные сельсины
Трёхфазные сельсины применяются в системах, где требуется обеспечить синфазное и синхронное вращение двух двигателей (валов), находящихся на расстоянии друг от друга.
Однофазные сельсины
Однофазные сельсины могут работать в двух режимах.
- Индикаторный режим. Сельсин-датчик принудительно поворачивается на определённый угол, а сельсин-приёмник устанавливается в соответствующее ему положение.
- Трансформаторный режим. Сельсин-датчик принудительно поворачивается на определённый угол, а на выходе сельсин-приёмника формируется напряжение, являющееся функцией угла рассогласования между ними.
Для обоих режимов существуют схемы включения:
- парная (датчик и приёмник),
- многократная (датчик и несколько приёмников),
- дифференциальная (два датчика и приёмник).
Функция датчика положения
Если взять и каким-либо способом (вручную, например) провернуть ротор одного из приборов на некоторый угол – равновесие токов в его катушке нарушается. Из-за электрической связи в катушках второго устройства наблюдается аналогичное рассогласование баланса токов. Вследствие этого появляется результирующая, отличная от нуля, что приводить к образованию э/м поля и момента индукции (вращающей силы). Под ее воздействием подвижный узел исполнительной части будет проворачиваться до состояния, в котором равновесие токов полностью восстановится. Нетрудно понять, что это состояние будет соответствовать положению другого прибора.
Авторегулирование
При авторегулировании приемник работает в трансформаторном режиме (на схеме – «б»). Его ротор в данной схеме неподвижен, а обмотка статора полностью отключена от сети. В ней наводится ЭДС за счет токов, протекающих в собственной роторной обмотке (их величина задается состоянием первого устройства). Отсюда следует, что величина наводимой в статоре приемника ЭДС полностью зависит от угла поворота подвижной части датчика.
Дополнительная информация: Из-за того, что обмотка статора приемника не подключена к сети – фаза напряжения в нем смещена на 90° относительно статорной катушки датчика.
Это обстоятельство учитываются при вычислении выходной ЭДС (через поправочный коэффициент).
Дифференциальный прибор
Это вариант исполнения применяется в тех случаях, когда возникает потребность в определении разности угловых положений двух электрически связанных приборов (таким образом, выявляется степень их рассогласования). Другими словами размещаемые на различных валах сельсиновые датчики в этом случае сравниваются по скорости перемещения их подвижных узлов, после чего определяется их рассогласование.
В данной схеме три катушки от двух крайних приборов электрически соединены с соответствующими обмотками ротора и статора еще одного (третьего) сельсина, который называется дифференциальным (на схеме – «в»). Угол вращения этого третьего определяется как разность показаний для двух приборов-датчиков.
Источник