Асинхронный двигатель и его работа
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
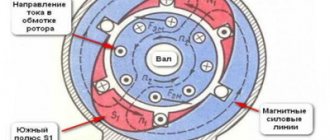
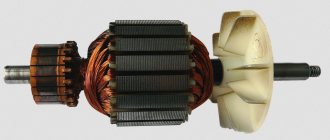
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Расчет и выбор тормозных резисторов для преобразователей частоты
В статье рассматривается методике расчета и выбора тормозного сопротивления (тормозного резистора) для преобразователей частоты (ПЧ, частотника), на примере остановки асинхронного двигателя типа АИР.
Тормозные резисторы являются необходимыми элементами систем с тяжелыми режимами торможения (остановка большой нагрузки за малое время), если в их составе имеются преобразователи частоты с промежуточным звеном постоянного тока (например, серии GA700, GA500, A1000, L1000, J1000).
YASKAWA преобразователи частоты серий GA700 и GA500
Примерами таких систем могут служить:
- Лифты, эскалаторы.
- Различные краны и подъемные механизмы.
- Шпиндели станков.
- Конвейеры и системы подачи заготовок.
Примеры применений где требуются тормозные сопротивления
Пример расчета тормозного резистора
В качестве примера, рассмотрим работу преобразователя частоты серии GA700 (модель CIPR-GA70C4208) с двигателем АИР 280 М6 с циклом работы в 90 секунд и временем торможения 4 секунды (остановка производится с номинальной скорости вращения до 0). Двигатель подключен к механизму напрямую (без редуктора), а общий момент инерции составляет 38 кг*м 2 .
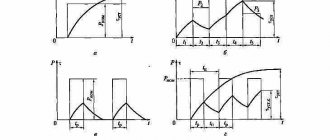
Циклограмма работы с участком торможения двигателя
Из циклограмм видно насколько сильно растет значение момента при переходе в отрицательную область во время торможения.
Если не предпринять меры по утилизации энергии, которая поступает на ПЧ во время торможения электродвигателя, то преобразователь отключится по ошибке перенапряжения на звене постоянного тока (код OV у YASKAWA). А в случае большой инерционной нагрузки на валу электродвигателя могут выйти из строя конденсаторы звена постоянного тока (ЗПТ).
Для утилизации возникающей энергии используют или тормозные сопротивления, преобразующие энергию в тепло, или рекуператоры для возврата ее в питающую сеть.
Для выбора тормозного резистора в первую очередь нам нужно определить электрическую мощность торможения:
Находим номинальную скорость двигателя в рад/с:
wном= 2p * nном/ 60 = 2p * 968 / 60 = 101,3 [рад/c]
Рассчитываем максимальный момент для полной остановки по заданному циклу. Если механика имеет в своем составе несколько кинематических узлов (например, редукторы, барабаны и т.д.), то в суммарном моменте инерции эти узлы должны быть приведены к валу двигателя:
Mмакс= J∑* (wнач– wкон) / tторм= 38 * (101,3 – 0) / 4 = 962,35 [Н * м]
Определяем максимальную мощность при торможении:
Pмакс= Mмакс* (wнач– wкон) = 962,35 ´ (101,3 – 0) = 97486 [Вт]
Определяем электрическую мощность торможения. Так, как отсутствует редуктор, то величину его КПД берем равной 100%:
Pэл.торм= (Pмакс– k * Pном.дв) – ((1 – hред) * Pмакс)= (97486 – 0,05 * 90000) – ((1 – 1) * 97486) = 92986 [Вт]
Здесь k
– вспомогательный коэффициент, зависящий от номинальной мощности двигателя:
| Pном.дв, кВт | k |
| до 1,5 | 0,25 |
| от 2,2 до 4,0 | 0,20 |
| от 5,5 до 11 | 0,15 |
| от 15 до 45 | 0,08 |
| выше 45 | 0,05 |
Производим расчет допустимого сопротивления резистора:
Rмакс= U
2зпт/ Pэл.торм= 7602/ 92986 = 6,2 [Ом]
будет иметь следующие значения в зависимости от величины напряжения на входе ПЧ:
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Рекуперативное торможение
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
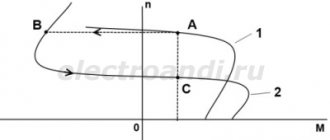
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Режим рекуперации в асинхронных электрических машинах
Режим рекуперации применяется не только в двигателях постоянного тока. Его можно применять и в асинхронных двигателях.
При этом такой режим возможен в следующих случаях:
- Если изменить частоту питающего напряжения при помощи частотного преобразователя. Что возможно при условии питания асинхронного электродвигателя от устройства с возможностью регулирования частоты питающей сети. Эффект торможения наступает при уменьшении частоты питающего напряжения. При этом переход в генераторный режим происходит, когда скорость вращения ротора становится больше номинальной (синхронной).
- Асинхронные машины, которые конструктивно имеют возможность переключения обмоток, для изменения скорости.
- В грузоподъёмных механизмах, где применяется силовой спуск. В них монтируется электромотор с фазным ротором. В этом случае скорость регулируется с помощью изменения величины резистора, подсоединяемого к обмоткам ротора. Магнитный поток начинает обгонять поле статора, а скольжение становится больше 1. Электромотор переходит в режим генератора, вырабатываемая электроэнергия возвращается в сеть, возникает тормозной эффект.
Торможение противовключением
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Варианты построения электрических тормозов
Рассмотрим несколько вариантов торможения двигателей электрическим способом, которые могут быть применимы на практике. При этом отметим возможности использования механизмов торможения по отношению к электродвигателям разных видов. Список рассматриваемых методик торможения включает следующие:
- противотоком,
- вводом постоянного тока,
- электронным способом,
- сверхсинхронной скоростью,
- другими способами.
Торможение самовозбуждением
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.
Пример с электромагнитным стопором
Современная промышленность выпускает различные варианты электродвигателей с тормозом. Установка моторов с электромагнитным тормозом, обычно, осуществляется на оборудовании, которому требуется мгновенная остановка. Это нашло довольно широкое применение для работы на станках и конвейерах, где большую роль играет соблюдение техники безопасности.
На практике это обычные промышленные асинхронные электродвигатели, особенностью которых является их длина (оборудование облачается в специальный кожух).
Первый способ подходит для случаев, когда неважно время срабатывания. При прекращении подачи напряжения из-за наведённого магнитного поля происходит постепенное уменьшение тока катушки
Медленное снижение магнитного поля приводит к медленному росту тормозного момента и длительному срабатыванию тормоза.
Второй вариант используется там, где требуется много срабатываний и точное позиционирование электропривода. В момент прерывания тока между катушкой и выпрямителем получается довольно быстрое снижение магнитного поля. Тормозной момент увеличивается быстро и соответственно срабатывание тормоза происходит почти мгновенно.