У двигателей постоянного тока с последовательным возбуждением, также как и у двигателей с независимым возбуждением, используется два способа торможения: динамическое (реостатное)
торможение и торможение
противовключением
.
Учитывая особенности двигателей постоянного тока с последовательным возбуждением, у них можно осуществить два вида реостатного торможения: торможение с независимым возбуждением
и торможение с
самовозбуждением
.
Торможение в режиме независимого возбуждения
При торможении в режиме независимого возбуждения, обмотка возбуждения отключается от обмотки якоря и подключается к постороннему источнику постоянного тока, а якорь электродвигателя отключается от сети и замыкается на тормозное сопротивление.
Схема двигателя постоянного тока последовательного возбуждения при динамическом торможении в режиме независимого возбуждения.
Характеристики в тормозных режимах описываются уравнениями:
ω = (Iа·Rа) / (CM·Фδ)
ω = -[(M·Rа) / (CM·Фδ)2]
Это прямые линии, проходящие через начало координат. Наклон этих линий зависит от величины добавочных сопротивлений, включаемых в цепь якоря.
Характеристики двигателя постоянного тока последовательного возбуждения при динамическом торможении в режиме независимого возбуждения. Rдоб.3>Rдоб.2>Rдоб.1
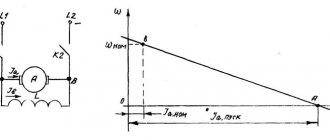
Динамическое торможение.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении
В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа
т.е. станет отрицательным. В результате электромагнитный момент также изменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
Торможение с самовозбуждением
При торможении с самовозбуждением обмотка возбуждения не отключается от якоря, а переключается с помощью схемы управления таким образом, чтобы направление тока в обмотке возбуждения осталось таким же, как и в двигательном режиме.
Схема двигателя постоянного тока последовательного возбуждения при динамическом торможении с самовозбуждением.
Характеристики двигателя постоянного тока последовательного возбуждения при динамическом торможении с самовозбуждением. Rдоб.3>Rдоб.2>Rдоб.1
Для возникновения и существования режима самовозбуждения необходимо соблюдение такого условия, как наличие остаточного магнетизма, и поток остаточного магнетизма должен совпадать по направлению с основным магнитным потоком, именно поэтому необходимо сохранить направление магнитного потока таким же, каким оно было в двигательном режиме.
Торможение в режиме самовозбуждения происходит медленнее, чем в режиме независимого возбуждения, так как тормозные характеристики нелинейные.
Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Динамическое торможение электродвигателя постоянного тока
осуществляется путем замыкания обмотки якоря двигателя накоротко или через резистор. При этом электродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
Рекуперативное торможение электродвигателя постоянного тока
осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г — ДПТ и ЭМУ — ДПТ.
Торможение противовключением электродвигателя постоянного тока
осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Различают статические и динамические режимы работы двигателей. В статическом режиме ω=const; IЯ=const; UДВ=const и он описывается так называемыми механическими характеристиками
.
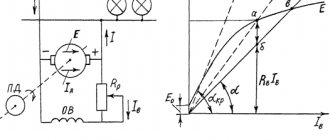
В статическом режиме двигатель независимого возбуждения описывается следующей системой уравнений:
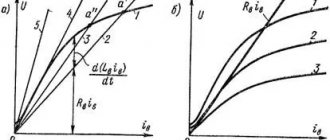
Поскольку применяемые в системах автоматического управления двигатели являются управляемыми, различают два типа управления двигателями постоянного тока — якорное управление и полюсное управление.
При якорном управлении производится изменение напряжения, подаваемого в якорную цепь без изменения возбуждения. При полюсном управлении, наоборот, меняется поле возбуждения путем изменения тока в обмотках главных полюсов iB. Для расширения диапазона управления применяют также комбинированное управление.
При полюсном управлении ФB=const, поэтому уравнение механической характеристики согласно
Электрическая машина работает в режиме двигателя при 0К.З., при M>MК.З. происходит вращение двигателя в противоположную сторону под действием внешнего момента — машина работает в режиме тормоза (режим противовключения), при ω>ω0 машина работает в режиме генератора на сеть, имеющую напряжение UH.
Для холостого хода, когда M=0, эта характеристика имеет вид гиперболы
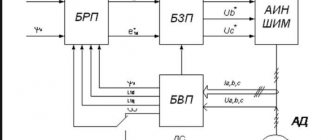
Двигатель постоянного тока как динамическая система описывается следующими уравнениями в операторной форме:
На основании этих уравнений может быть построена структурная схема двигателя как динамической системы
где — коэффициент передачи, — постоянная времени якоря, — электромеханическая постоянная времени.
Пользуясь формулой Хевисайда, по передаточным функциям можно построить переходные процессы, например при пуске двигателя, как это показано на .
Рис. 5-7б. Переходный процесс при пуске ДПТ.
При TM»TЯ, как это обычно бывает, получим выражения для тока и скорости при пуске:
Для анализа динамики двигателя постоянного тока при полюсном управлении рассматривают уравнения, аналогичные уравнениям в отклонениях, так как регулировочная характеристика при полюсном управлении является нелинейной.
Производят линеаризацию системы для малых отклонений относительно каких-то нулевых значений, представив переменные в следующем виде:
; ; ; ;
Тогда на основании уравнений можно написать уравнения в отклонениях (при TЯ=0).
На основании этих уравнений может быть построена структурная схема двигателя как динамической системы при полюсном управлении ( ).
Рис. 5-8а. Структурная схема ДПТ при полюсном управлении.
С помощью этой схемы получим передаточную функцию для ДПТ при полюсном управлении
По этой передаточной функции, пользуясь формулой Хевисайда, можно получить кривые переходного процесса в двигателе при ступенчатом изменении напряжения возбуждения, показанные на .
Рис. 5-8б. Переходный процесс при пуске ДПТ при полюсном управлении.
Характ-ки дв-ей с посл-м и незав-ым возб-ем
25)Механические характеристики электродвигателей постоянного тока
Рассмотрим двигатель с параллельным возбуждением в установившемся режиме работы (рис. 11.14). Обмотка возбуждения подключена параллельно якорной обмотке.
, откуда
(11.6)
Механической характеристикой двигателя называется зависимость частоты вращения якоря n2 от момента на валу M2 при U = const и Iв = const. Уравнение (11.6) является уравнением механической характеристики двигателя с параллельным возбуждением. Рис. 11.14
Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 11.15).
На рисунке 11.16 изображен двигатель последовательного возбуждения. Якорная обмотка и обмотка возбуждения включены последовательно.
| Рис. 11.15 | Рис. 11.16 |
Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.
где k — коэффициент пропорциональности. Момент на валу двигателя пропорционален квадрату тока якоря.
откуда
Механическая характеристика двигателя последовательного возбуждения является мягкой (рис. 11.17).
| Рис. 11.17 | Уравнение механической характеристики двигателя последовательного возбуждения выглядит следующим образом: |
С увеличением нагрузки скорость двигателя резко падает. С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима. Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения.
Остальные характеристики:
Послед-ое возб-ие
Скорость вращения двигателя с последовательным возбуждением можно регулировать теми же способами, что и у двигателя с независимым возбуждением. Но так как двигатель с последовательным возбуждением обладает определенными особенностями, для регулирования скорости приходится применять специальные схемные решения.
Схема регулирования скорости вращения двигателя с последовательным возбуждением введением активного сопротивления в цепь якоря.
При введении активного сопротивления в цепь якоря, скорость вращения снижается, и при достаточно больших значениях добавочного сопротивления можно получить точку короткого замыкания.
Рассмотрим изменение скорости изменением магнитного потока.
Для того чтобы изменить ток в обмотке возбуждения не изменяя других параметров двигателя, используются специальные схемные решения – шунтирование обмотки возбуждения двигателя активным сопротивлением Rш.
Iа = Iв + Iш
Чем меньше шунтируемое сопротивление, тем меньше ток возбуждения.
Регулировочные характеристики при изменении магнитного потока.
Как видно из электромеханической характеристики двигателя независимого возбуждения, увеличение тока нагрузки или тока якоря приводит к уменьшению скорости вращения. Это вызвано физическими процессами, происходящими внутри машины. У многих производственных механизмов возникает необходимость в изменении скорости вращения двигателя пи постоянной нагрузке. Это связано с технологическим процессом, выполняемым данным производственным механизмом.
Регулированием скорости называется изменение скорости вращения двигателя при постоянном токе нагрузки.
ω = (U – Iа • ΣRа) / (CM • Фδ)
Из формулы электромеханической характеристики видно, что скорость вращения двигателя можно изменить тремя способами: 1. Изменением активного сопротивления в цепи якоря. 2. Изменением магнитного потока. 3. Изменением напряжения на зажимах якоря.
Прежде чем рассматривать регулировочные характеристики, введем понятие естественной и искусственной характеристик. Зависимость скорости вращения двигателя от тока якоря, снятая при номинальном напряжении, номинальном магнитном потоке и отсутствии добавочных сопротивлений в цепи якоря называется естественной характеристикой.
Если хотя бы один из параметров (U или Фδ) отличается от номинальных или в цепи якоря имеется добавочное внешнее сопротивление, характеристика называется искусственной.
Изменение сопротивления.
Изменение магнитного потока.
Изменение напряжения.
Последов-го возб-ия
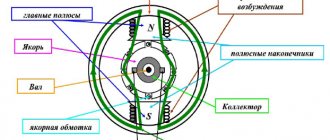
Свойства двигателей постоянного тока, как и генераторов, в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с параллельным, независимым, последовательным и смешанным возбуждением. Схемы включения двигателей отличаются от схем включения соответствующих генераторов только наличием пускового реостата, который вводится для ограничения тока при пуске.
Обратимость электрической машины.
Машина постоянного тока с независимым или параллельным возбуждением, подключенная к сети с постоянным напряжением, может работать как в генераторном, так и в двигательном режиме и переходить из одного режима работы в другой.
Для контура «обмотка якоря—сеть», согласно второму закону Кирхгофа,
Ε-U=ΙαΣΚa,(10.40)
откуда
(10.41)
Если E>U, то ток 1асовпадает по направлению с ЭДС Ε и машина работает в генераторном режиме (рис. 10.50, а). При этом электромагнитный момент Μ противоположен направлению вращения n, т. е. является тормозным. Уравнением (10.40) для генераторного режима имеет вид
Рис. 10.50.
Схемы работы машины постоянного тока в генераторном (а)
и двигательном (б) режимах
U=E—IaΣRa.(10.42)
Если E<U, то ток 1ав уравнении (10.41) изменяет знак и направлен против ЭДС Е. В соответствии с этим изменяет знак и электромагнитный момент М, т. е. он действует по направлению вращения п. При этом машина работает в двигательном режиме (рис. 10.50,б) и уравнение (10.40) принимает вид
U=E+IaΣRa,(10.43)
Таким, образом, генераторы с независимым и параллельным возбуждением, подключенные к сети с напряжением U, автоматически переходят в двигательный режим, если их ЭДС Ε меньше напряжения сети U. Эти двигатели автоматически переходят в генераторный режим, когда их ЭДС Ε больше U.
При работе машины постоянного тока в двигательном режиме ЭДС Ε и вращающий момент Μ определяются теми же формулами, что и в генераторном режиме:
(10.44)
(10.45)
но момент имеет противоположное направление. Из (10.43) и (10.44) можно получить формулу для определения частоты вращения
если за положительное направление тока 1адля двигательного режима принять его направление, встречное с ЭДС Е.
(10.46)
Двигатель с параллельным возбуждением. В
этом двигателе (рис. 10.51, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат RpB, а в цепь якоря—пусковой реостат Rn. Характерная особенность двигателя— его ток возбуждения Iвне зависит от тока якоря
Рис. 10.51.
Схема двигателя с параллельным возбуждением (а) и его мо-
ментная и скоростная характеристики (б)
1а(тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии, согласно (10.45) и (10.46), получаем, что зависимости M=f(Ia) и n = f(la) (моментная и скоростная характеристики) линейные (рис. 10.51,б). Следовательно, линейная и механическая характеристика двигателя n = f(M) (рис. 10.52, а).
Если в цепь якоря включен добавочный резистор или реостат Rn, то
п = [U-Iа(ΣRа + RП)]/(сеФ) = п0-Δп,(10.47)
где по=U/(сеФ) — частота вращения при холостом ходе; Δп = (ΣRа + Rп)1а/(сеФ) — снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.
Величина Δn, зависящая от суммы сопротивлений ΣRа + + RП, определяет наклон скоростной n = f(Iа)и механической n = f(M) характеристик к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления Rn указанные характеристики жесткие (естественные характеристики 1 на рис. 10.51,б и 10.52, а), так как падение напряжения 1аΣRа в обмотках машины, включенных в цепь якоря, при
Рис. 10.52.
Механические (а) и рабочие (б) характеристики
двигателя с параллельным возбуждением
номинальной нагрузке составляет лишь 3…5% от UHOM. При включении добавочного реостата угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4, соответствующих различным сопротивлениям реостата Rnl, Rn2 и Rn3. Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Реакция якоря, уменьшая несколько поток машины Φ при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения η возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные двигатели большой и средней мощностей с параллельным возбуждением часто имеют небольшую последовательную обмотку возбуждения, которая придает механической характеристике необходимый наклон. МДС этой обмотки при токе Iном составляет около 10% от МДС параллельной обмотки.
Регулировочный реостат Rp.B позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. Как следует из (10.46), при этом изменяется и частота вращения п. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и может возникнуть круговой огонь.
Рабочие характеристики рассматриваемого двигателя (рис. 10.52,6) представляют собой зависимости потребляемой мощности Ρ1, тока ΙαIн, частоты вращения n, момента Μ и КПД η от отдаваемой мощности Р2на валу двигателя при U=const и IB = const. Характеристики n = f(Р2) и М = f(Р2) являются линейными, а зависимости Ρι = f(Ρ2), Ia = f(P2) и η = f(P2) имеют характер общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря 1а.
Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения Iв также не зависит от тока якоря 1а.
Двигатель с последовательным возбуждением
. В этом двигателе (рис. 10.53,а) ток возбуждения Iв = Iа, поэтому
Рис. 10.53.
Схема двигателя с последовательным возбуждением (а) и его моментная и
скоростная характеристики (б)
магнитный поток Ф является некоторой функцией тока якоря 1а. Характер этой функции изменяется в зависимости от нагрузки двигателя. При Iа<(0,8…0,9)Iном, когда магнитная система машины не насыщена, Ф = kфIа, причем коэффициент пропорциональности kф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф возрастает медленнее, чем Iа, при больших нагрузках (Iа>IНОМ) можно считать, что Фconst. В соответствии с этим изменяются зависимости
n = f(Ia) и M = f(Ia).
При /а<(0,8…0,9)/ном скоростная характеристика двигателя n = f(la) (рис. 10.53,6) имеет форму гиперболы, так как частота вращения
(10.48)
где С1и С2— постоянные.
При 1а > Iном скоростная характеристика становится линейной, так как частота вращения
(10.49)
где С’1и С’2— постоянные.
Аналогично можно получить зависимость электромагнитного момента от тока якоря M=f(la). При Iа<(0,8…0,9)Iн* *Iном моментная характеристика M=f(Ia) имеет форму параболы (рис. 10.53,б), так как электромагнитный момент
М=смФIа= смкф12а = С312а,(10.50)
где С3 — постоянная.
При Ia>IHOM моментная характеристика линейная, так как
Рис. 10.54.
Механические (а) и рабочие (б) характеристики двигателя
с последовательным возбуждением
М=смФ1а = С’31а,(10.51)
где С’з — постоянная.
Механические характеристики n = f(M) (рис. 10.54, а) можно построить на основании зависимостей n = f(la) и М= f(la). При Iа<(0,8…0,9)Iном частота вращения изменяется по закону
(10.52)
где С4 — постоянная.
При Ia>Iном зависимость n = f(M) становится линейной.
Включая в цепь якоря пусковые реостаты с сопротивлениями Rnl9 Rn2 и Rn3 кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4, причем, чем больше Rn, тем ниже располагается характеристика.
Рабочие характеристики двигателя с последовательным возбуждением приведены на рис. 10.54,б. Зависимости n = f(P2), M=f(P2) являются нелинейными; зависимости P1 = f(P2)’ Ia = f(P2) и η = f(P2) имеют примерно такой же характер, как и у двигателя с параллельным возбуждением.
Из рассмотрения рис. 10.54, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются мягкими и имеют гиперболический характер. При малых нагрузках частота вращения п резко возрастает и может превысить максимально допустимое значение (двигатель идет «в разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода или при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2…0,25)IНОМ; только двигатели малой мощности (десятки ватт) используют для работы
Рис. 10.55.
Характеристики двигателей с последовательным
и параллельным возбуждением
в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Это объясняется тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. При жесткой характеристике частота вращения n почти не зависит от момента М, поэтому мощность
P2=MΩ= 2nnM/60 =C5M,(10.53)
где С5 — постоянная.
При мягкой характеристике двигателя с последовательным возбуждением частота вращения η обратно пропорциональна вследствие чего
(10.54)
где С5 — постоянная.
Поэтому при изменении нагрузочного момента в широких пределах мощность Р2, а следовательно, мощность Р1и ток 1а у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением; кроме того, они лучше переносят перегрузки. Например, при заданной кратности перегрузки по моменту М/Мном = kM ток якоря в двигателе с параллельным возбуждением увеличивается в kм раз, а в двигателе с последовательным возбуждением — только в раз. Поэтому двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока Iп/Iном = ki пусковой момент его Mn = k2iMHOM, а у двигателя с параллельным возбуждением Mn = kiMnoM.