При расчетах в относительных единицах за базисные величины принимают номинальные данные двигателя Iя, Мном, Uном, nном. Иногда в качестве базисных принимают величины, отличающиеся от номинальных (например, момент статической нагрузки). Величины, выражаемые в относительных единицах, в дальнейшем будут обозначены знаком.
Сопротивления главной цепи в относительных единицах определяют в долях номинального сопротивления.. Под номинальным понимают такое сопротивление цепи якоря, которое при неподвижном якоре и номинальном расчетном напряжении Uном обусловливает номинальную силу тока в якоре:
Сопротивление цепи якоря складывается из внутреннего и внешнего сопротивлений. Значения внутреннего сопротивления обмоток двигателей серий ДП и Д в долях номинального при ПВ = 25 % приведены в табл. 2.23. В графе rя* указано сопротивление якоря и дополнительных полюсов двигателей, а в графе r’n* — сопротивление обмотки двигателей последовательного возбуждения. Сопротивление стабилизирующих обмоток двигателей параллельного возбуждения настолько мало, что им можно пренебречь. При расчете типовых характеристик для группы двигателей сопротивление обмоток следует определять как среднее арифметическое значений, приведенных в соответствующих строках табл. 2.23.
Расчет механических характеристик двигателей в относительных единицах приведен ниже и является универсальным. Этот метод расчета пригоден для различных способов возбуждения и соединения обмоток.
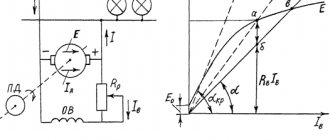
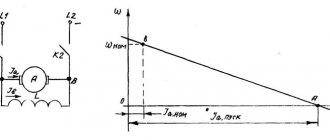
Схема включения двигателя изображена на рис. 2.12, на котором показаны три варианта (1, 2, 3) включения обмоток последовательного возбуждения. Сила тока в этих обмотках обозначена через Iп1, Iп2, Iп3. Обмотка параллельного возбуждения в общем случае получает питание от независимого источника с напряжением Uв.
При расчете механических характеристик, как правило, используют известные схему включения обмотки последовательного возбуждения, сопротивления последовательной и шунтирующей цепей Rп и Rш, напряжение источника питания цепи якоря (главной цепи) Uг, МДС обмотки параллельного возбуждения и соотношение между МДС обмоток последовательного и параллельного возбуждения при номинальной нагрузке. Напряжение Uг может иметь независимое от нагрузки значение Uг — const (сеть постоянного тока). При применении вращающихся или статических преобразователей энергии задают внешнюю характеристику этих преобразователей Uг = f (I) (I — сила тока нагрузки).
МДС главных полюсов двигателя обусловлена суммарным действием электрического тока в обмотках возбуждения, расположенных на этих полюсах. Поскольку номинальная МДС, принятая за базисную, складывается из МДС обмотки параллельного возбуждения и МДС обмотки последовательного возбуждения или стабилизирующей обмотки, то можно принять, что МДС обмотки параллельного возбуждения в относительных единицах будет составлять 0,5 для двигателей серий ДП и Д смешанного возбуждения и 0,9 для двигателей серий ДП и Д параллельного возбуждения. На долю обмотки последовательного возбуждения или стабилизирующей обмотки будет приходиться остальная часть МДС. Учитывая, что эта часть соответствует МДС при протекании номинального тока, для любой силы тока МДС обмотки последовательного возбуждения можно выразить следующими формулами:
для двигателей серий ДП и Д смешанного возбуждения,
где I*п — сила тока, протекающего по обмотке последовательного возбуждения;
для двигателей параллельного возбуждения со стабилизирующей обмоткой серий ДП и Д
Полная МДС главных полюсов выражается в виде алгебраической суммы МДС обмоток последовательного и параллельного возбуждения:
В некоторых случаях для реализации повышенных (пониженных) частот вращения двигателей МДС обмотки параллельного возбуждения берут меньше (больше) номинальной.
Общий метод расчета механической характеристики двигателей постоянного тока в рассматриваемой схеме (см. рис. 2.12) включения заключается в нахождении зависимостей F* = f (Iя*) и Iп* = f (Iя*) и последующем переходе к зависимости n* = f (М*).
Зависимость силы тока в последовательной обмотке от силы тока якоря двигателя устанавливают по одному из следующих уравнений:
каждое из которых справедливо при наличии обмотки последовательного возбуждения только в одной цепи.
Соответственно зависимость ЭДС от силы тока якоря определяют по одной из следующих зависимостей:
Частоту вращения п при заданной силе тока якоря находят по формуле n = Е/ФсE, где Ф — магнитный поток двигателя; сЕ — коэффициент пропорциональности напряжения.
Для получения уравнений в относительных единицах введем следующие базисные величины: nб = nном; Iб = Iном; Еб = Uном; Фб = Фном; Rб = Rном. Используя соотношения
можно записать nном/nо = с’Е, в котором
где rдв = rя + rп; n0 — частота вращения при идеальном холостом ходе.
Тогда формулу для определения частоты вращения в относительных единицах запишем так:
так как в относительных единицах Ф* = (Е/п)*.
Магнитный поток Ф* для соответствующей силы тока якоря при известной МДС главных полюсов (F* = F*пар + F*п) определяют по универсальным нагрузочным характеристикам. Нагрузочной характеристикой называют зависимость (Е/n)* = f (F*) при постоянной силе тока якоря I*я. Так как вид нагрузочных характеристик зависит от силы тока якоря, то они изображаются в виде семейства кривых, построенных при различных значениях Iя. Характеристика при Iя = 0 является кривой намагничивания двигателя.
На рис. 2.13 показаны универсальные характеристики двигателей серий ДП и Д. Характеристики изображены в относительных единицах. За базисные величины приняты номинальная МДС главных полюсов двигателя при ПВ = 25 % и номинальный магнитный поток Ф главных полюсов при протекании по якорю двигателя тока номинальной силы при ПВ — 25 % в направлении, соответствующем двигательному режиму. Типовые нагрузочные характеристики соответствуют действительным нагрузочным характеристикам конкретных двигателей серий ДП и Д, отличаясь от характеристик, полученных на основе опыта, на 2—3 %.
Электромагнитный момент двигателя (в Н?м)
где cM — коэффициент момента.
Вращающий момент на валу двигателя отличается от электромагнитного на величину, определяемую механическими потерями и потерями в железе якоря. Таким образом, вращающий момент на валу двигателя может быть представлен в следующем виде:
где ?Р — потери мощности на трение; ?Рст — потери мощности в стали; kM— коэффициент пропорциональности моментов.
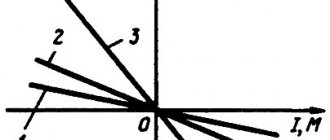
Параметр ?M* = kM* (?P* + ?Р*ст)/n* определяют по кривым, выражающим зависимость ?M* = f (Е/n)* при различных постоянных значениях частоты вращения n*. Такие кривые, построенные в относительных единицах, показаны на рис. 2.14.
Пользуясь этими кривыми, нетрудно найти момент ?М* при различных магнитных потоках главных полюсов и частотах вращения. Коэффициент момента сM можно определить, исходя из того, что при базисных силе тока, магнитном потоке и частоте вращения вращающий момент на валу двигателя также должен быть равен базисному (номинальному). Следовательно, пользуясь выражением (2.39), можно написать, что при Мдв = Мб = Мном т. е.
Определив по рис. 2.14, что для (Е/n)* = 1 и n* = 1 ?М* = 0,03, найдем
Окончательно формула для определения вращающих моментов на валу имеет вид
Базовые расчетные показатели
О том, как узнать мощность электродвигателя в статье будет показано далее, на примере с исходными данными.
Хороший научный проект не останавливается на конструировании силового аппарата. Очень важно произвести расчет мощности электродвигателя и различные электрические и механические параметры вашего аппарата и рассчитать формулу мощности электродвигателя используя неизвестные значения и полезные формулы.
Для расчета электродвигателя мы будем использовать Международную систему единиц (СИ). Это современная метрическая система, официально принятая в электротехнике.
Одним из важнейших законов физики является основной закон Ома. Он утверждает, что ток через проводник прямо пропорционален приложенному напряжению и выражается как:
I = V / R
где I — ток, в амперах (A);
V — приложенное напряжение, в вольтах (V);
R — сопротивление, в омах (Ω).
Эта формула может использоваться во многих случаях. Вы можете рассчитать сопротивление вашего двигателя, измерив, потребляемый ток и приложенное напряжение. Для любого заданного сопротивления (в двигателях это в основном сопротивление катушки), эта формула объясняет, что ток можно контролировать приложенным напряжением.
Потребляемая электрическая мощность двигателя определяется по следующей формуле:
Pin = I * V
где Pin — входная мощность, измеренная в ваттах (Вт);
I — ток, измеренный в амперах (A);
V — приложенное напряжение, измеренное в вольтах (V).
Расчет тока по мощности — формула, онлайн расчет, выбор автомата
Что делать, если вы купили или достали каким-то образом эл.двигатель, на котором отсутствует бирка или шильдик с обозначением его мощности, частоты вращения и т.п.?
Либо на старом движке эти данные стерлись и стали нечитабельны.
При этом паспорта или какой-то другой технической документации у вас под рукой нет. Можно ли в этом случае узнать параметры двигателя самостоятельно?
Конечно же да, причем несколькими способами. Давайте рассмотрим самые популярные из них.
Первоначально для точного определения мощности потребуется выяснить синхронную частоту вращения вала, а перед этим узнать, где у нас начало каждой обмотки, а где ее конец.
По ГОСТ 26772-85 обмотки трехфазных асинхронных двигателей должны маркироваться буквами:
Еще раньше можно было встретить надписи Н1-К1 (начало-конец обмотки №1), Н2-К2, Н3-К3.
На некоторых движках для облегчения распознавания концов обмоток их выводят из разных отверстий на одну или другую сторону. Как например на фото снизу.
Но не всегда можно доверять таким выводам. Поэтому проверить все вручную никогда не помешает.
Если никаких обозначений и букв на барно нет, и вы не знаете, где у вас начало, а где конец обмотки, читайте инструкцию под спойлером.
В помощники берете мультиметр и устанавливаете его в режим замера сопротивления.
Одним щупом дотрагиваетесь до любого из шести выводов, а другим поочередно прикасаетесь к остальным пяти проводам, тем самым, ища соответствующую пару.
При ее нахождении на табло мультиметра должна высветиться цифра, показывающее некое сопротивление в Омах.
Мнение эксперта
It-Technology, Cпециалист по электроэнергетике и электронике
Задавайте вопросы «Специалисту по модернизации систем энергогенерации»
Как рассчитать мощность зная силу тока и напряжения? Линейный двигатель по существу является асинхронным двигателем, ротор которого разворачивается , так что вместо создания вращательной силы вращающимся электромагнитным полем, он создает линейную силу вдоль своей длины путем установки электромагнитного поля смещения. Спрашивайте, я на связи!
Асинхронные электрические машины
Двигатели с короткозамкнутым ротором
Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.
Двигатели с фазным ротором
Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети. Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.
Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%.
Какое освещение Вы предпочитаете
ВстроенноеЛюстра