Асинхронные электродвигатели представляют собой полноценные системы, качество работы которых определяется техническими характеристиками. Для чего они нужны и каким образом измеряются и изменяются, мы опишем далее. Параметры двигателя – первое, что необходимо знать перед началом его эксплуатации.
Асинхронный двигатель
Для того, чтобы обеспечить нормальную слаженную работу асинхронных силовых агрегатов, необходимо знать все об этих моторах, в частности, их рабочие и механические характеристики. Это необходимо, как при покупке компонентов в магазине, так при реализации их своими руками. Также, при помощи правильного регулирования этих показателей, вы сможете успешно управлять работой двигателя, обеспечивая не только высокую продуктивность, но и снижение энергозатрат.
Общие параметры
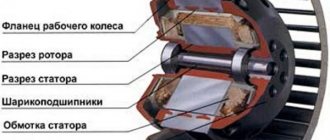
По умолчанию, стандартная машина асинхронного типа (без доработок и модификаций) включает 2 основных компонента:
- статор – неподвижную деталь;
- ротор – деталь, поддающаяся вращениям.
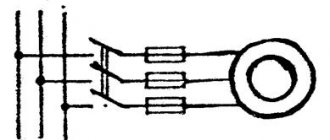
В трехфазных моделях 3 отдельные фазы представляют собой статорную обмотку. С1, С2, С3 на рисунке – это их начало, а С3, С4, С5 – концы. Абсолютно все они подключаются к клеммным разъемам, с использованием одной из двух схем: «звезда» или «треугольник». На изображении их можно видеть под вариантам Б и В.
Схема устройства асинхронного мотора
Конкретная схема для построения, выбирается с учетом паспортных данных электродвигателя и показателей сетевого напряжения, от которого будет производиться питания.
Основная задача статора – создание магнитного поля внутри мотора, которое бесперебойно вращается. Ротор же бывает двух видов – фазный и короткозамкнутый. Последний имеет скорость оборотов, которая не поддается регулированию. Применение такого компонента в силовом агрегате делает конструкцию проще и дешевле. Момент запуска у таких устройств, правда, низкий, чего не скажешь о моторах с ротором фазным. У него скорость вращения управляется при помощи ввода вспомогательного сопротивления.
Теги
обмоток статора сетевымего статор.в статор уложенона статоре.поток статора одинна статор.пазов статора разделитеполюсов статора увеличиваютна статоре четыренапример статор имеетесли ротор подсобой ротор.название ротор.качестве ротора можетвала роторной части.обращении ротора вобращений ротора которыхпоказателя ротора.вращением ротора иже ротор вращаетсясетевым током спостоянного тока переменного тока постоянного тока Сгенерированный ток идвижения токов вдвижения токов вперемещения тока ввариации тока вэлектрического тока в
делению
Принцип действия мотора
Первое, что осуществляется – на статорную обмотку подается электрическое напряжение. По каждой отдельной фазе можно видеть постоянно меняющиеся магнитные потоки, смещенные по отношению друг к другу на угол 120 градусов. В результате получается общий результирующий поток, который также вращаемый, а с его помощью создается электродвижущая сила внутри роторных проводников.
Именно так в результате получается ток, который совмещается с потоком результирующим, что создает момент пуска. А он в свою очередь приводит ротор в движение.
Это общее, упрощенное описание принципа действия силового агрегата с разными скоростями оборотов. Для того, чтобы рассмотреть работу мотора, стоит углубиться в механические и рабочие характеристики, точно влияющие на вышеописанный алгоритм срабатывания.
Составляющие электромашины
Основой для электрической машины является правило электроиндукции с магнитной индукцией. Такой прибор включает в себя статор или как его называют константной частью (характерно для асинхронных, синхронных машин изменяющегося тока) или индуктора (для приборов константного тока) и ротора, его называют активной или движущейся частью (для асинхронных и синхронных машин изменяющегося тока) или якоря (приборов константного тока). В роли константной части для машин тока с малой мощью активно применяются магниты (неизменного состояния).
Механическая характеристика
Суть данного параметра состоит в прямой зависимости частоты оборотов ротора от показателей нагрузки. То есть, от момента вращения на валу. Когда нагрузка находится на номинальном уровне, то частота вращений для разнотипных моторов варьируется в диапазоне от 92,5 до 98% от частоты оборотов n1. Скольжение (Sном) при этом не превышает уровень в 2 – 7,5%.
Механическая характеристика
Чем выше уровень нагрузки, с которой работает мотор, тем ниже частота оборотов электрического мотора. Частота оборотов асинхронного двигателя несущественно снижается при усилении нагрузки в пределах от нуля до максимального значения. Визуально это можно видеть выше, на рисунке А. из этого следует, что электрический агрегат относится к моторам с жесткой механической характеристикой.
М макс., то есть наибольший крутящий момент, агрегат развивает, когда имеется определенное скольжение (Skp), который находится на уровне от 10 до 20 процентов. Соотношение величин Ммакс и Мном указывает на перегрузочную способность мотора. Отношение же Мп к М номинальному, указывает на пусковые качества электродвигателя.
Электрический мотор способен стойко и бесперебойно работать при условии обеспечения самостоятельного регулирования, когда будет автоматически установлено равновесие между моментом нагрузки, нацеленным на вал (Мвн) и М моментом, который развивает непосредственно двигатель. Это условие отлично отображается на верхней части характеристики, при достижении максимального показателя М. Другими словами — до уровня точки В.
В ситуациях, когда момент нагрузки М превышает показатель М макс., то мотор имеет сниженную устойчивость и останавливается. Параллельно с этим по машинным обмоткам будет довольно долго подаваться ток в несколько раз выше номинального, что может привести к перегоранию. Температура деталей растет, из-за превышенного электричества.
При подключении в электрическую цепь роторных обмоток от пускового реостата, на выходе мы получим полный набор механических характеристик. Первый параметр при эксплуатации мотора без стартового реостата, называют естественной характеристикой. Второй, третий и четвертый показатель, которые получаются при подсоединении к роторной обмотке двигателя реостата, обладают сопротивлениями R1п (2п и 3п соответственно), относятся к механическим характеристикам реостатного типа.
Когда же проводится запуск пускового реостата, механическую характеристику называют мягкой или крутопадающей. Это обусловливается тем, что существенно возрастает показатель активного сопротивления роторной цепи R2 и увеличивается Sкр. Параллельно с этим снижается ток запуска. Данная величина (Мп) также регулируется R2. При этом, существует возможность подобрать реостат с определенным сопротивлением, для того, чтобы момент пуска (Мп) равнялся максимальному М.
Электромеханическая характеристика
Показатель является зависимостью угловой скорости оборотов от статорного тока. При использовании сразу нескольких опорных точек можно создать такую характеристику. Для этого проводят расчет таких величин:
- номинальный ток:
Пример вычисления
- критическое скольжение:
Вычисление
- уровень тока в начальные моменты старта.
Начальный момент пуска
Все эти значения максимально точно отображают электромеханическую характеристику.
Измерение скорости вращения
Измерение скорости вращения валов, шестерен, колес и других элементов, осуществляется, как правило, при помощи электронных тахометров. Типовая схема электронного тахометра приведена на рис. 26.
Тахометры измеряют скорость вращения n с размерностью . Уже первый взгляд на эту размерность позволяет понять, что тахометр должен выполнять два вида измерений одновременно. Во-первых, измерять количество оборотов (вала, шестерни, колеса и т.п.). Во-вторых, измерять время. Для выполнения таких измерений электронный тахометр (рис. 26) содержат электронный секундомер, фотоэлектрический датчик и логическое устройство ЛУ.
С устройством и работой электронного секундомера мы познакомились в предыдущем разделе. Теперь познакомимся с устройством и работой фотоэлектрического датчика. Он состоит из светодиода – излучателя СД, фотодиода – приемника ФД и формирователя электрических импульсов ФС1. Светодиод СД излучает свет на фоточувствительную поверхность фотодиода приемника ФД. При этом сопротивление фотодиода падает. Если на линии светового потока между светодиодом СД и фотодиодом ФД поместить непрозрачный материал, то сопротивление фотодиода ФД резко возрастет.
Рис. 26. Функциональная схема электронного тахометра
Это свойство фотоэлектрического датчика широко используется в технике и в измерениях. Для измерения скорости вращения между оптопарой – (светодиодом излучателем и фотодиодом приемником), помещают диск 1 с отверстиями, вращающийся на валу 2 (рис. 26). В процессе вращения вала 2 отверстия в диске будут прерывать световой поток между светодиодом СД и фотодиодом ФД. При этом сопротивление фотодиода ФД будет непрерывно изменяться синхронно с частотой вращения вала. Формирователь импульсов ФС1 реагирует на изменения сопротивления фотодиода, преобразуя каждое из их в стандартные по напряжению и длительности прямоугольные электрические импульсы на своем выходе (см. рис. 27, (а). Чем быстрее вращается диск 2, тем больше частота следования импульсов на выходе формирователя ФС1.
Теперь познакомимся с работой логического устройства ЛУ (рис. 26). Логическое устройство имеет два входа и один выход. Принцип его работы можно сформулировать как «2-И». То есть, если и на первый и на второй входы логического устройства ЛУ подано напряжение (условие «2-И» выполняется), то и на его выходе тоже будет напряжение. Если хотя бы на одном из входов ЛУ напряжения нет (условие два «И» не выполняется), то и на его выходе напряжения не будет. Данный принцип работы ЛУ хорошо иллюстрируют графики, представленные на рис. 27.
Рис. 27. Графики электрических импульсов при работе схемы электронного тахометра, (А) – импульсы на выходе формирователя ФС1 в точке А; (Б) – импульсы периодов времени счета (с выхода делительной декады ДД4); (В) – импульсы на выходе логического устройства (на входе в СчД1); (Г) – импульсы, обнуляющие счетные декады в момент начала нового периода счета
В процессе измерения тахометром скорости вращения вала 2 (рис. 26) на выходе формирователя ФС1в точке (А) вырабатываются электрические импульсы с частотой следования отверстий в диске 1. Эти импульсы подаются на первый вход логического устройства ЛУ. Одновременно с этим на второй вход ЛУ в точку (Б) от выхода делительной декады ДД4 поступают импульсы периодов времени счета.
Глядя на рис. 27. не трудно видеть, что условие «2-И» может периодически выполняться только в момент, когда на второй вход ЛУ в точку (Б) в течение 1 секунды подается напряжение 5 вольт. В это же время с выхода формирователя ФС1на первый вход ЛУ в точку (А) поступают электрические импульсы, вызванные вращением диска 2. Таким образом, на выходе логического устройства ЛУ в точке (В) формируются прямоугольные электрические импульсы, которые по внешнему виду повторяют импульсы, поступающие от формирователя ФС1. Они поступают на счетные декады СчД, поэтому этот режим называется «счет».
После периода счета импульсов, в течение следующего периода времени продолжительностью в 1 секунду, напряжение на втором входе ЛУ становится равным нулю. На выходе ЛУ напряжение тоже становится равным нулю, поскольку принцип «2-И» не выполняется. Счет не возможен. На счетных декадах в течение одной секунды отображается результат счета. Этот режим называется «индикация».
После режима «индикация» автоматическое устройство управления сбросом УУС (рис. 26) вырабатывает на своем выходе в точке (Г) короткий электрический импульс, который подается одновременно на входы обнулениявсехсчетных декад. Счетные декады обнуляются, и начинается новый режим счета. Таким образом, режимы «счет» и «индикация» циклически повторяются.
Чтобы по показаниям электронного тахометра определить скорость вращения вала, шестерни и пр., используют формулу:
(2.18)
где: N – результат счета на дисплеях счетных декад; k – количество отверстий в диске датчика; t – период времени счета.
Например, на дисплеях счетных декад электронного тахометра отобразилось число 2400. В диске датчика 80 отверстий. Период времени счета равен 1 секунде. В этом случае:
об/сек.
Если в окружности диска сделать 60 отверстий, а период времени счета будет равен 1 секунде, то с учетом того, что в 1 минуте 60 секунд, электронный тахометр будут показывать скорость вращения в размерности .
Абсолютная погрешность Δn измерения числа оборотов электронным тахометром вычисляется по следующей формуле:
, (2.19)
где: Δtизм – абсолютная погрешность длительности импульса времени (от нестабильности генератора опорных частот); nх – измеренная скорость вращения; tизм – длительность импульса времени (в нашем примере он равен 1 секунде).
Относительную погрешность измерения числа оборотов электронным тахометром определим по формуле:
(2.20)
Например, необходимо определить абсолютную и относительную погрешности измерения числа оборотов электронным тахометром, если он показывает величину измеренной скорости вращения nх = 1000 об/мин, а абсолютная погрешность длительности импульса времени Δtизм = 0,0001 с. Используя формулу (2.19) определим абсолютную погрешность измерения числа оборотов электронным тахометром:
Рабочие характеристики
Данные параметры указывают на зависимости от полезной мощности Р2 = Р макс. таких показателей:
- частот вращений (n) или скольжения (S);
- валового момента (М2);
- статорного тока I1 ;
- КПД (коэффициента полезного действия).
Рабочие характеристики
При этом значения частоты f1 и напряжения U1 должны быть на номинальных уровнях. Они реализуются для областей устойчивого срабатывания мотора. Это означает, что диапазон должен быть от нулевого скольжения до того, которое превышает номинальное на 10 – 20%.
Частота оборотов при растущей отдаваемой мощности мало поддается изменениям. Это уже можно было видеть в механической характеристике, тогда, когда валовый момент М2 пропорциональный показателю мощности Р2. Крутящий момент ниже, чем электромагнитный момент, разница представляет собой значение момента торможения Мтр, который генерируется силами трения.
Статорный ток I1 увеличивается вместе с отдаваемой мощностью, но, когда показатель Р2 равен нулю, присутствует определенный ток для работы на холостых оборотах – I0. Уровень КПД также снижается, практически идентично, как у трансформатора, сохраняя довольно-таки высокое значение, в относительно широком спектре нагрузок.
Наибольший коэффициент полезного действия для асинхронных силовых агрегатов со средними и большими мощностями, варьируется в пределах 0,75 – 0,95. Чем выше мощность машины, тем больше у нее КПД.
Мощностной коэффициент косинус ϕ1 у асинхронных моторов аналогичных характеристик при наличие максимальной нагрузки составляет 0,7 – 0,9.
Исходя из этого, можно видеть, что силовые агрегаты перегружают электрические подстанции и сети питания своими довольно внушительными токами, которые могут достигать от 40 до 70% от номинальных токов. Это – один из самых весомых недостатков установок такого типа.
Если же моторные нагрузки на порядок меньше, например 25 – 50% от рабочих, то мощностной коэффициент падает до недостаточных значений – 0,5 – 0,75. Когда осуществляется снятие нагрузки с мотора, коэффициент мощности уменьшается еще и новые показатели составляют 0,25 – 0,3. Именно поэтому нельзя допускать, чтобы асинхронный двигатель функционировал длительное время на холостых оборотах, а также при существенных недогрузках.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде. FU1-FU9 — плавкие предохранители, KK1 — тепловое реле, KM1 — магнитный пускатель, L1-L3 — контакты для подключения к сети трехфазного переменного тока, M1-M3 — асинхронные электродвигатели, QF1-QF3 — автоматические выключатели, UZ1 — устройство плавного пуска, UZ2 — преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
Функциональная схема частотно-регулируемого привода
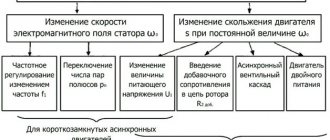
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление
является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление
используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.