Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
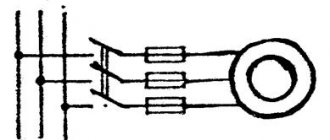
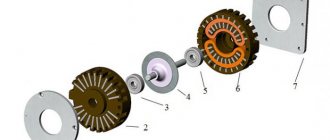
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Немного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
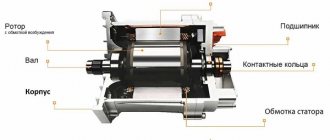
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
Рис. 2. Ротор асинхронного двигателя с КЗ обмотками
Пластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
- однофазные;
- двухфазные;
- трёхфазные.
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Что из себя представляют потери сердечников и железа
В некотором роде эти расходы подразделяются на потерю вихревых токов и гистерезисные. Первые можно минимизировать путем применения наслоений, имеющихся на сердечнике. Раз их применяют, то область будет меньше, а сопротивление, соответственно, выше, тем самым станут ниже вихревые токи.
Например, гистерезисные утраты можно минимизировать с помощью высококачественной кремнистой стали. Это влияет на построение.
От того, какой будет частота напряжения, зависит потеря сердечника. У статора частота всего 50 Гц, а у ротора еще меньше — 1,5 Гц и все это из-за того, что при нормальном состоянии работы проскальзывание не более 3%. Как следствие маленькие потери сердечников ротора, если сравнить их с расходами сердечников статора. Как раз по ошибке именно ими некоторые предпочитают пренебрегать при рабочем состоянии.
Что касается потерь трения щеток и механических
В двигателях с асинхронным действием с обмотанным ротором может возникнуть утрата трения щеток. В подшипниках можно встретить механическую потерю. На старте все они на нулевой отметке, но по мере роста скорости траты будут только расти. В трехфазных моторах скорость всегда постоянная. Можно сделать вывод, что и эта потеря будет постоянной, а от нее зависит и построение.
Особенности переменных потерь
Данный вид потерь называется также сокращением меди. Произойти они могут из-за электрических токов, идущих по обмотке ротора и статора. При изменении нагрузки данный ток тоже будет меняться вместе с этими сокращениями. Это послужило возникновению названия переменных утрат. Их получают с помощью проведения тестов с заблокированными роторами 3-х фазных моторов.
Важно!
Основной функцией этих приводов является преобразование электрической энергии в механическую. Во время него энергия будет проходить несколько разных этапов. Когда она проходит по разным ступеням, то будет отображаться на диаграмме, указывающей течение энергии. Всем известно, что на входе трехфазных асинхронных двигателей подача тоже является трехфазной. Поэтому она будет идти на стор 3-х фазного электромотора.
Ротор и статор
Частично эта энергия на входе применяется для того, чтобы поддерживать недостатки статора. А в их роли выступает дефицит меди и железа статора. Та энергия, которая сохранится, пойдет на ротор на входе. Он уже преобразует эти входы на ротор в энергию механического плана. Но этот вход не получится преобразовать в такой же выход, так как он поддерживает нехватку энергии на роторе. Когда ротор вращается, то расход железа будут зависеть от частоты ротора, а она предельно небольшая. Но этим предпочитают пренебрегать. Так что лучше будет, чтобы вход на ротор поддерживали медные утраты.
После создания энергии она пойдет на нагрузку посредством валов. Не избежать появления небольших расходов по механике: (сопротивления воздуха и трения). Поэтому общая воспроизводимая энергия механического характера обязана подаваться на поддержание тех самых потерь.
Расчет механической характеристики асинхронных двигателей
Естественные характеристики механического плана подобных моторов соответствуют основным (паспортным) схемам его включения и номинальным параметрам напряжения питания. А вот их искусственный аналог получится, когда включают кое-что из дополнительных элементов:
- конденсаторов;
- реакторов;
- резисторов.
Когда движок запитывает не номинальное напряжение, то характеристики будут отличаться от естественных характеристик — они крайне удобны и полезны в качестве инструмента, когда анализируют статические и динамические режимы электроприводов. Бывают как искусственные характеристики электромоторов, так и естественные.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
n1 = (f1*60) / p, где n1 – синхронная частота, f1 – частота переменного тока, а p – количество пар полюсов.
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике. Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
Рис. 3. Кривая крутящего момента скольжения
При увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Рабочие характеристики трехфазного асинхронного двигателя
Рабочими характеристиками называются зависимости мощности Р
1скольжения
s,
тока в фазе статора
I
1
, КПД η
и cosφ1 от полезной мощности
Р
2при
U
1= const и
f1
= const.
Характеристики строятся для зоны практически устойчивой работы двигателя, т.е. до значений скольжений(1,1… 1,2)%. Опытным путем характеристики получают путем изменения нагрузки на валу двигателя при помощи вспомогательного нагрузочного устройства, из которых предпочтительным является генератор постоянного тока независимого возбуждения. Непосредственно измеряют момент, скорость вращения, ток статора, мощность, потребляемую из сети. Скольжение, КПД и коэффициент мощности определяют расчетным путем по соотношениям, приведенным выше.
Рабочие характеристики, построенные в относительных единицах, представлены на рис. 3.16.
Рис. 3.16. Рабочие характеристики трехфазного асинхронного двигателя
Зависимость s(P
2
)
практически линейна и кривая слабо наклонена к оси абсцисс, поскольку
s
H
≈
(0,08…0,1) и момент практически линейно зависит от скольжения.
Зависимость Р
1
(Р
2
)
также близка к линейной, как и зависимость
I
1
(Р
2
).
Это свидетельствует о том, что активная составляющая тока пропорциональна полезной мощности
Р
2
.
Реактивная составляющая тока в диапазоне рабочих нагрузок меняется мало, поскольку она определяется током холостого хода
I
0, который составляет 20…40% от номинального тока. Поэтому зависимость
I
1
(P
2
)
выходит не из начала координат.
Зависимость cosφ
1
= f(P
2
)
показывает, что при малых нагрузках
cosφ
1 имеет низкие значения (0,1…0,3). С увеличением нагрузки
cosφ
1 увеличивается, достигая максимума (0,75…0,9) при нагрузке, близкой к номинальной. С ростом нагрузки и мощности активная составляющая мало изменяется по сравнению с режимом холостого хода. При дальнейшем росте нагрузки
cosφ
1 снижается из-за роста потоков рассеяния обмоток.
Зависимость η(Р
2
)
имеет такой же характер, как и у трансформатора. Максимум КПД имеет место при нагрузках, немного меньших, чем номинальное значение. При дальнейшем увеличении нагрузки КПД снижается из-за роста электрических потерь, которые пропорциональны квадратам токов статора и ротора.
Из анализа рабочих характеристик следует, что при малых нагрузках работа двигателя неэффективна, он имеет малые значения КПД и коэффициента мощности. С другой стороны, если двигатель перегружен, то эффективность его работы также снижается, но сверх того, он испытывает повышенный нагрев, а условия охлаждения, напротив, ухудшаются, поскольку интенсивность охлаждения зависит от куба скорости вращения вентилятора на валу двигателя. Поэтому, выбирая двигатель для конкретного механизма, следует как можно точнее рассчитывать его мощность.
Способы пуска и регулирования
Частоты вращения АД.
Пусковые свойства асинхронных двигателей в основном определяются следующими величинами: пусковым током, пусковым моментом, плавностью и экономичностью процесса пуска, длительностью пуска. В каталогах обычно указывается кратность пускового тока IП/IН
и пускового момента
МП/МН.
Кроме того, пусковые свойства асинхронного двигателя определяются особенностями его конструкции, в частности устройством ротора, который может быть с обычной короткозамкнутой обмоткой, с глубокопазной короткозамкнутой обмоткой, с фазным ротором.
Различают три вида пуска: прямой, пуск с пониженным напряжением на статоре, реостатный пуск
(для двигателей с фазным ротором).
Прямой пуск
наиболее простой и чаще всего применяется для пуска двигателей с короткозамкнутым ротором. Необходим лишь коммутирующий аппарат — рубильник или магнитный пускатель, а для двигателя высокого напряжения — масляный выключатель. Пуск происходит путем непосредственного подключения обмотки статора к сети. При прямом пуске двигателя кратность пускового тока велика и составляет примерно 5,5…7 (для двигателей мощностью 0,6…100 кВт при синхронной скорости 750…3000 об/мин). Кратковременный толчок пускового тока относительно безопасен для двигателя, но вызывает увеличение потери напряжения в сети и может неблагоприятно сказаться на других потребителях энергии, присоединенных к той же сети. Поэтому допустимая номинальная мощность асинхронных двигателей при прямом пуске зависит от мощности распределительной сети. В мощных сетях допускается прямой пуск двигателей с короткозамкнутым ротором мощностью и до 1000 кВт, но в большинстве случаев эта мощность не превышает 100 кВт.
У двигателей общепромышленного исполнения с короткозамкнутой обмоткой ротора кратность пускового момента лежит в пределах 1,2…2,5. Таким образом, двигатель при пуске имеет большую силу тока, а развивает относительно небольшой пусковой момент.
Пуск с пониженным напряжением на статоре. Используется для мощных двигателей с целью ограничения пускового тока. Используют для этой цели реакторы (трехфазные катушки индуктивности), автотрансформаторы (рис. 3.17).
Рис. 3.17. Схема пуска короткозамкнутого двигателя: а —
с помощью реактора;
б
— при помощи автотрансформатора
Для уменьшения пускового тока можно на начальном этапе пуска понизить напряжение на зажимах статора, включив последовательно с обмоткой статора трехфазное индуктивное сопротивление — реактор Р
(рис. 3.17,
а
). При пуске замыкается выключатель
В1,
и, таким образом, осуществляется последовательное соединение реактора и двигателя
МА.
Когда скорость двигателя приближается к номинальной, замыкается выключатель
В2,
который закорачивает катушку и подает напряжение сети непосредственно на статор
МА.
Уменьшение пускового тока, создаваемое понижением напряжения на статоре, вызывает уменьшение пускового момента, пропорционального квадрату напряжения на статоре. Например, при таком пуске уменьшение пускового тока в 2 раза будет сопровождаться уменьшением пускового момента в 4 раза. Во многих случаях при пуске двигателя под нагрузкой такое понижение момента недопустимо, двигатель не сможет преодолеть механический момент торможения на валу.
Еще менее выгодно применение вместо реактора активного сопротивления поскольку это связано с дополнительными потерями энергии в реостате.
Для мощных двигателей часто применяется пуск при помощи автотрансформатора (рис. 3,17,б
). Пуск происходит в два этапа: на первом этапе переключатели
П1-ПЗ
находятся в положении
1.
На двигатель
МА
подается пониженное фазное напряжение, и пусковой ток уменьшается пропорционально коэффициенту трансформации, но пусковой ток в сети меньше пускового тока двигателя в
k
раз. Следовательно, понижение напряжения автотрансформатором в
к
раз уменьшает пусковой ток в сети в
k
2раз. В то же время пусковой момент, пропорциональный квадрату напряжения, уменьшается в
k
2раз. Таким образом, пусковой момент уменьшается пропорционально линейному пусковому току, тогда как при реостатном пуске момент уменьшается пропорционально квадрату пускового тока. Например, при понижении напряжения автотрансформатором вполовину пусковой ток сети понизится в
2
раза и в
2
раза понизится и пусковой момент. На втором этапе переключатели
П1-ПЗ
переводятся в положение
2
и к статору подводится полное напряжение сети.
Понижение напряжения на статоре на время пуска можно осуществить также посредством переключения на время пуска обмотки статора, нормально работающей при соединении «треугольником», на соединение «звездой». Такое переключение применяется только для пуска в ход короткозамкнутых двигателей относительно малой мощности, примерно до 20 кВт, работающих нормально при соединении обмоток статора «треугольником». При пуске обмотка статора соединяется «звездой», благодаря чему фазное напряжение уменьшается в √3 раз, примерно во столько же раз уменьшается и фазный пусковой ток. Переключение с «треугольника» на «звезду» используется также для того, чтобы дать возможность применять одни и те же двигатели при двух различных линейных напряжениях, например 220/380 В. Для упрощения переключения, а также для использования стандартных перемычек, зажимы обмоток статора на присоединительном щитке двигателя располагаются соответствующим образом (рис. 3.18).
Рис. 3.18. Расположение на щитке зажимов начал и концов обмотки
статора
Следует отметить, что для машин переменного тока, разработанных после 1 января 1987 г., установлена система обозначений выводов обмоток (ГОСТ 26772-85), соответствующая международным стандартам: фаза A: U1w U2,
фаза В:
V1
и
V2,
фаза С:
W1
и
W2.
При соединении обмотки в «звезду»
внутри
двигателя используют обозначения выводов:
U, V, W (N
— если нейтраль выведена); при соединении обмотки в «треугольник»:
U, V, W.
Линейные провода на схеме обозначаются соответственно:
L1, L2w L3.
Хорошими пусковыми свойствами обладает асинхронный двигатель с двойной беличьей клеткой. В таком двигателе короткозамкнутая обмотка ротора выполнена в виде двойной беличьей клетки, т. е. короткозамкнутый ротор снабжается двумя клетками, лежащими в теле ротора одна над другой: нижней — рабочей / и верхней — пусковой 2
(рис. 3.19,
а
). Стержни нижней клетки имеют обычно большее сечение (рис. 3.19,
б
). Таким образом, активное сопротивление верхней клетки значительно больше активного сопротивления нижней клетки (в 4—5 раз). Обе клетки
снабжены с торцевых сторон замыкающими кольцами.
Рис. 3.19. Ротор с двойной беличьей клеткой (а)
и сечения верхнего и нижнего стержней
(б)
В первый момент пуска двигателя (пока g
= 1) частота токов в роторе равна частоте сети; в этих условиях полное сопротивление внутренней клетки обусловливается главным образом ее большим индуктивным сопротивлением. Таким образом, при пуске двигателя в роторе имеет место явление вытеснения тока из внутренней беличьей клетки. В то же время полное сопротивление наружной клетки является преимущественно активным сопротивлением и создает большой пусковой момент, как это имеет место и у двигателя с контактными кольцам при включении пускового активного сопротивления. Отношение токов верхней и нижней клеток зависит от отношения полных сопротивлений этих клеток; обычно при пуске ток нижней клетки значительно меньше тока верхней клетки.
По мере разгона ротора частота токов в нем уменьшается, уменьшается и влияние индуктивного сопротивления на распределение токов. При номинальной скорости вращении частота токов ротора имеет значение порядка 1 Гц; в этих условиях индуктивные сопротивления весьма малы и распределение токов между клетками ротора определяется отношением активных сопротивлений клеток, поэтому большая часть тока проходит по нижней, рабочей клетке, а результирующее активное и полное сопротивления ротора в таких условиях малы, как у обычного двигателя с короткозамкнутым ротором.
Таким образом, у двигателей с двойной беличьей клеткой активное сопротивление обмотки ротора в целом изменяется в зависимости от изменения скольжения — оно велико при пуске и мало при номинальной скорости. Благодаря этому двигатель с двойной беличьей клеткой, по сравнению с обычным двигателем, имеющим короткозамкнутый ротор, развивает повышенный пусковой вращающий момент при пониженном пусковом токе.
Двигатель с глубоким пазом ротора также обладает повышенным пусковым моментом. Это обусловлено также явлением вытеснения тока и представляет собой упрощенный вариант двигателя с двойной клеткой. Обмотка ротора этого двигателя изготовляется из прямоугольных стержней малой ширины и большой высоты, которые помещаются в соответствующие глубокие пазы в стали ротора или заливаются в них.
Рис. 3.20. Стержень ротора и распределение магнитного
поля в глубокопазном ротаре
Переменный ток распределяется по сечению проводника в общем случае неравномерно; это явление использовано в данном двигателе. На рис. 3.20 показано поле рассеяния, замыкающееся поперек глубокого паза, когда по стержню обмотки проходит ток.
Часть стержня, лежащая в глубине паза, сцеплена с большим потоком рассеяния, чем верхняя часть того же стержня. Вследствие этого при пуске двигателя в повышенное реактивное сопротивление нижней части стержня вызывает вытеснение тока ротора в верхнюю часть сечения стержня. Это эквивалентно уменьшению сечения стержня и увеличению активного сопротивления обмотки ротора, благодаря чему повышается пусковой момент двигателя и уменьшается пусковой ток.
При рабочей скорости двигателя индуктивное сопротивление становится незначительным благодаря уменьшению частоты, ток распределяется по сечению стержня почти разномерно и двигатель работает, как обычный короткозамкнутый.
Двигатель с глубоким пазом ротора в конструктивном отношении проще двигателя с двойной клеткой и получил широкое применение.
Лучшие пусковые условия обеспечивает асинхронный двигатель с фазным ротором (рис. 3.21,а
). При включении в цепь ротора пускорегулирующего сопротивления можно получить семейство механических характеристик с пусковыми моментами от минимального значения
Мп,
соответствующего естественной характеристике, до
Мп
1
,
равного критическому моменту двигателя
Мкр.
При этом пропорционально будет уменьшаться ток двигателя, поскольку
R3>R2>R1.
Рис. 3.21. Схема соединения обмоток статора и ротора
асинхронного двигателя с фазным ротором (а)
и механические характеристики двигателя при увеличении
пускорегулирующего сопротивления от 0 до R3 (б)
При изменении добавочного сопротивления в цепи ротора максимальный момент двигателя не изменяется, поскольку он не зависит от активного сопротивления ротора, увеличение сопротивления только смещает его в сторону большего скольжения. Выключение ступеней пускового реостата заставляет двигатель переходить с одной характеристики на другую.
Сопротивления реостата обычно выводят на контакты, благодаря чему при пуске момент двигателя и ток изменяются по ступенчатой кривой (рис. 3.21,б
), число ступеней которой определяется числом контактов пускового реостата. Чем ближе пусковой момент к максимальному моменту, тем больше будет и пусковой ток. По этой причине лишь для особо тяжелых условий пуска реостат подбирается так, чтобы пусковой момент был равен максимальному.
Пусковой реостат должен в течение времени пуска, не перегреваясь, поглощать мощность, примерно равную мощности двигателя. Следовательно, размеры пускового реостата определяются частотой пусков. В ряде случаев пусковые реостаты выполняются с масляным охлаждением.
Таким образом, применение пускового реостата значительно улучшает пусковые условия асинхронного двигателя, повышая пусковой момент и уменьшая толчок тока. Однако, с другой стороны, двигатель с фазной обмоткой ротора дороже двигателя с короткозамкнутой обмоткой, усложняется его обслуживание, что следует иметь в виду при подборе двигателя для конкретных механизмов.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Устройство асинхронной машины
Схематичное устройство асинхронной машины
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Как строится естественная механическая характеристика двигателя
В качестве ЕМХД понимают зависимость оборотов мотора от моментов на валу, когда сохраняются номинальные условия работы движка касательно его параметров:
- добавочного сопротивления;
- частоты;
- введения в цепь статора;
- номинального напряжения.
Как только меняется один или несколько параметров, то это тут же вызовет соответствующее изменение особых характеристик мотора. И ее уже будут называть искусственной. Учитывая данные, указанные на шильдиках всех абсолютно приводов, можно отыскать любой из основных его электрических и прочих параметров.
Естественные подобные характеристики соответствуют работе электромотора, у которого номинальные параметры и номинальная схема запуска. А вот искусственная характеристика по механике соответствует работе электромотора с параметрами, которые отличаются от номинальных. К примеру, когда вводятся показатели сопротивления, меняются запитывающее частота напряжение.
Что касается номинальной мощности механической асинхронного электромотора
Паспортные таблички электромотора содержит сведения про номинальную специфическую мощность на валах данного мотора. Речь идет не о той мощности, которая потребляется этим электромотором. Для того, чтобы определить номинальную активную электрическую мощность электромотора, если брать за основу данные с таблички, нужно учитывать при расчете коэффициент полезного действия. А у каждого электродвижка он свой. Это обозначает, что лишь та доля активной мощности, что подается из сетей на обмотку статора моторов и безвозвратно потребляется приводом, имеет возможность преобразоваться на валу в механический вид мощности.
Паспортная табличка асинхронного электродвигателя
Следует различать номинальные механические мощности и полную электрическую мощность разноплановых электромоторов
. Та электромощность, которая подается на статор электромотора от сети, в обязательном порядке больше, чем определенная мощность на валах и больше тех активных мощностей, которые без возврата потребляется движком.
Что касается механической характеристики асинхронных электроприводов:
- угловые скорости;
- линейные скорости;
- вращения ротора;
- номинальные рабочие моменты на валах.
С какой скоростью происходит вращательное движение на самом деле, можно оценить при помощи частоты вращения. Речь идет о числе оборотов валов мотора за минуту. Учитывая тот факт, что привод рассматривается асинхронного типа, то появиться ротора вращающемуся моменту можно лишь при наличии разницы между скоростью роторов и магнитных полей. Называют эту разницу скольжением.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
Рис. 4. Схемы подключения
Для подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сеть
С целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.