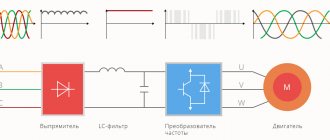
Тиристорные преобразователи позволяют подавать на двигатель импульсы электрического тока различной конфигурации. Характеристики и пропускная способность меняются в зависимости от спецификаций системы и самого устройства.
В последнее время промышленные системы, приводимые в движение электричеством, все чаще включают в себя тиристорный преобразователь для двигателя постоянного тока. Эти полупроводниковые вентили позволяют осуществлять управление приводом в значительном диапазоне: сила тока может превышать сотни ампер, а напряжение достигает 1000В и выше.
При своих повышенных технических показателях тиристорный электропривод отличается компактными габаритными размерами. При этом его быстродействие превышает аналогичные показатели у других систем похожего назначения, а диапазон рабочих температур позволяет эксплуатировать двигатель постоянного тока в окружающей среде от -60 до +60 по Цельсию.
Что такое тиристор
Тиристорная система – это частично управляемая система преобразования напряжения. Общая схема работы предполагает активацию привода в момент подачи потенциала необходимого уровня на управляющий электрод. Чтобы отключить тиристорный преобразователь двигателя постоянного тока, необходимо выполнить принудительный разрыв цепи. Это можно осуществить тремя способами:
- подать гасящее напряжение, имеющее значение, противоположное пусковому импульсу;
- отключить энергоснабжение всего привода;
- провести ток питания через ноль.
Скорость вращения электродвигателя зависит от среднего значения напряжения, уже прошедшего через выпрямитель. Тиристорный электропривод позволяет управлять моментом подачи основного потока выпрямленного напряжения и его задержкой. Регулируя момент подачи, можно осуществлять общее управление двигателем постоянного тока.
Разработка
Электрическая схема тиристорный преобразователь-двигатель (к примеру, КТЭ) для плавного переключения может быть двух видов:
- Однофазной;
- Многофазной.
В зависимости от типа исполнения варьируются соотношения расчетных единиц и принципы работы преобразователя.
Фото — нулевая схема трехфазного преобразования
На этом чертеже схематически показано изменение электрической энергии при работе тиристорного преобразователя в режиме выпрямителя и инвертора. В то же время, для мостовой схемы можно сделать такую же диаграмму, но только состоящую из двух нулевых. Именно она наиболее часто используется при проектировании преобразователя для станочного оборудования. Это происходит из-за того, что исходное фазовое напряжение в ней в два раза превышает фазовой напряжение (Udo) в нулевой схеме работы.
Фото — питание
Однофазная схема используется для контроля питания и работы привода машин с высоким индуктивным сопротивлением. Она работает в пределах мощности от 10 кВт до 20, намного реже – при больших мощностях. К примеру, подойдет для электрической печи, домашнего станка.
Фото — однолинейная схема
Трехфазная используется для оборудования, где требуется от 20 кВт для работы. К примеру, для синхронных приводов, двигателя крана и экскаватора. Еще одной популярной многофазной схемой контроля является шестифазная (Кемрон). Её проект предусматривает использование в конструкции уравнительного реактора, который направлен на контроль низкого напряжения и высокого тока. Этот силовой электрический прибор пропускает и преобразовывает электрическую энергию параллельным путем, а не последовательным (как большая часть аналогичных устройств). Его более сложно разработать своими руками, но степень надежности и эффективности значительно больше, нежели у однофазного тиристорного преобразователя. Но такой реверсивный контроллер имеет серьезный недостаток – его КПД менее 70 %.
Своими руками можно сделать собственный преобразователь, но многое зависит от используемой базы. Внизу дана схема, разработанная на основе Micro-Cap 9. Главной особенностью этой модели является необходимость в совместном моделировании различных узлов.
Фото — Схема тиристорного уравнителя
Видео: как работают тиристорные преобразователи
Общая классификация
Проведя исследование системы, предполагающей наличие тиристора, можно определить наиболее оптимальную схему включения. От выбранного типа запуска непосредственно зависит средний уровень напряжения, выдаваемого выпрямителем при условии отсутствия вмешательства со стороны оператора. В случаях, когда тиристор применяется для двигателя постоянного тока, используются два класса тиристорных преобразователей – мостовые и оснащенные выходом с нулевым значением.
Тиристорный преобразователь мостового типа, как правило, устанавливается в высокомощных системах. Это оптимально в силу того, что каждый такой тиристор может обладать меньшим уровнем напряжения, что позволяет распределить общую нагрузку между несколькими узлами и снизить нагрузку на каждый из них. Кроме того, выпрямленное через мостовой тиристор напряжение не будет иметь постоянную составляющую, что повышает стабильность работы при проходе электрического тока через преобразующие обмотки.
Еще одним отличием между разными классами тиристоров является количество фазовых выходов. Оборудование и приборы, имеющие малый уровень энергопотребления, требуют наличия у тиристора всего нескольких фаз. Если преобразователь спроектирован для работы в высоконагруженных комплексах, его конструкция может включать от 12 до 24 фазовых контактов.
Вне зависимости от выбранного типа активации и общей конструкции данная категория преобразователей напряжения будет иметь все преимущества использования тиристоров. Сюда входит полное отсутствие вращающихся деталей, которые ускоряют процесс износа и требуют периодической замены. Из этого вытекает другое преимущество – низкая инерционность. Главным отличием от простых электромеханических преобразователей электрического тока является компактность, что положительно влияет на совместимость с устройствами, где мало свободного места.
При всех своих преимуществах тиристорный преобразователь имеет ряд недочетов:
- если настройка напряжения проводится в сторону снижения, выходная мощность начинает падать пропорционально уменьшению энергоснабжения;
- при работе преобразователя создаются высшие гармоники, которые сразу попадают в сеть питания всей системы;
- тиристор жестко связан с цепью подачи питания, из-за чего малейший скачок напряжения сразу отзывается в системе. Изменение характеристик подаваемого на двигатель тока создает толчок оси, скачкообразно меняя скорость ее вращения, а это в свою очередь вызывает всплеск тока.
Эксплуатационные показатели электродвигателя, который работает в связке с тиристорным преобразователем, напрямую зависят от уровня напряжения, которое подается на якорь. Также важную роль играет создаваемая приводом нагрузка.
Принцип действия и конструктивные особенности
Чтобы преобразовать нагрузку применяют тиристорный преобразователь цепей высокого напряжения на основе IGBT. Частотный преобразователь на тиристорах – это прибор преобразования тока, регулировки его параметров и уровня тока. Частотным преобразователем можно выровнять значения параметров приводов на электромоторах: угол, обороты вала при запуске и другие.
Схема тиристорного выравнивателя.
Для мотора постоянного тока используют преобразователь на тиристорах. Достоинства этого прибора позволили создать ему широкое применение. К преимуществам относятся:
- КПД (95%) у марки ПН-500.
- Область контроля: мотора от малых мощностей до мегаватт.
- Может выдерживать значительные импульсы нагрузок запуска двигателя.
- Долговечная и надежная эксплуатация.
- Точность.
Недостатки имеются и у этой системы. Мощность находится на низшем уровне. Это проявляется при точном регулировании процесса производства. В качестве компенсации используют дополнительные устройства. Такой частотный преобразователь не может работать без помех. Это видно при эксплуатации чувствительных приборов электрооборудования и радиотехнических устройств.
Составные части:
- Реактор в виде трансформатора.
- Блоки выпрямления тока.
- Реактор для сглаживания преобразования.
- Перенапряжение не воздействует на защиту.
Преобразователи (2017 г) подключаются через реактор. Трансформатор служит для согласования звена напряжения выхода и входа, выравнивания между ними напряжения. Схема электрического соединения включает в себя реактор для сглаживания. Частотный преобразователь имеет схему, в которой есть сглаживающий реактор.
Частотник пропускает нагрузку. Нагрузка идет в блоки выпрямителя в выходное звено. Чтобы выровнять питание нескольких устройств подключают индукционные потребители на специальных шинах.
Преобразователи частоты бывают двух типов – высокочастотные и низкочастотные. Подбор нужной модели осуществляется по необходимым параметрам цепей электроэнергии. В 3-фазных станках тип подключения иной. 1-фазный ток переносит воздействия, но КПД теряется на преобразовании 3-фазного тока.
Система применяется в плавильном производстве, контроле подъемно-транспортных устройствах, сварочном производстве. Такой принцип работы нагрузки реализовывает систему двигателя с генератором. На наименьших оборотах двигателя происходит регулировка оборотов шпинделя в широком диапазоне, настройка разных характеристик привода мотора.
Типовая конструкция и принцип работы
Тиристором называется полупроводник, изготовленный из кремния. Как правило, он состоит из четырех токопроводящих слоев. Сборка проводится на медном основании, которое имеет шесть граней и хвостовик с нарезанной резьбой. Этот элемент дополняется основной структурой, в производстве которой применяется специальный кремний.
Четырехслойный пропускной комплекс имеет два выхода – управляющий и отрицательный. Снаружи вся конструкция защищена железным корпусом, имеющим форму цилиндра и оснащенным изоляционным слоем. При помощи резьбы тиристор устанавливается в специальное посадочное место и подключается к плюсовому полюсу цепи питания с анодным напряжением.
Самодельный преобразователь частоты на тиристорах
Я взял двигатель асинхронного типа мощностью 2 кВт. Все собирал самостоятельно. Нужно было получить из сети в 220 вольт три фазы для управления электродвигателем. Нужно было управлять оборотами двигателя, не получать скачков выходного напряжения.
Посмотрев информацию в Интернете, нашел схемы различного рода. Предлагается очень много разных вариантов. Я остановился именно на этой схеме, так как его мощность до 4 кВт, функции защиты работают нормально.
Я взял корпус от системного блока компьютера и вмонтировал в него все детали. Можно было сэкономить, и сделать по-другому, но у меня уже был этот шкаф. Блок питания я покупал отдельно.
Хотя можно было собрать схему блока питания самому. Ни с кем не советовался и сам начал собирать. Собрал набор конденсаторов с реле, диодный мост с полевыми транзисторами. Установил вентилятор охлаждения на случай, если будет двигатель нагрузки 4 кВт, и будет нагреваться. При двигателях 2-3 кВт преобразователь работает нормально, никаких проблем с нагревом нет. Я решил сделать так, чтобы вентилятор не работал постоянно, так как он будет засасывать в шкаф пыль, потом его надо будет чистить. Решил сделать так, чтобы кулер включался и выключался при определенных температурах.
Для этого я сделал небольшую плату регулировки с реле, хотя можно тоже ее купить. За полдня собрал эту плату из имеющихся деталей. В шкафу имеется шунт, который настроен для двигателя 4 кВт. Если будет перегрузка по току, то двигатель выключится. Плата преобразователя сделана на микроконтроллере. Если поменять контроллер и поставить кварц на 20 мГц и два конденсатора в обвязке кварца, то можно поменять прошивку, вынести на панель корпуса монитор, ручку регулятора оборотов. При работе можно будет изменять частоту.
Но я делать этого не стал, так как нужны были дополнительные деньги. Этот частотник мне обошелся около трех тысяч рублей, это на 2017 год. Заводской преобразователь на тиристорах такого же класса, пусть даже в меньшем корпусе обошелся бы около 7-10 тысяч рублей. Это зависит от бренда изготовителя.
Такой частотный преобразователь можно применять на станках с ЧПУ на шпиндель, вывести контроль на пульт управления. Проверим, как он работает. Включаем старт, двигатель плавно включился и работает. Выключаем его, затем включаем реверс и повторяем операции. Все работает нормально.
Недавно купил выпрямитель за 1000 рублей. Это недорого для тиристорного выпрямителя. Такие диоды приходится заказывать из других регионов. Если управляющий электрод замкнуть на анод, то он превращается в диод. Если убираем, то превращается в тиристор. Если к проводам припаять плату управления, то им можно управлять. Получается тиристорный выпрямитель. Я поставил его на сварочный аппарат. На ручную дуговую сварку не стоит ставить тиристорный выпрямитель, так как при сварке большие пульсации, сварочный шов получается плохого качества. Для полуавтомата тиристоры подойдут, там пульсации не важны.
Управление работой
Общая схема действия заключается в прохождении через тиристор электричества под действием анодного напряжения. При этом величина напряжения на выходе зависит от показателей управляющего тока, который подается на контрольный электрод. Если подача управляющего тока прервана, анодное напряжение, выходящее к потребителю, начнет расти, при этом сохраняя низкую величину.
Когда входящее напряжение нарастает, объем тока, необходимого для открытия тиристора, уменьшается. Между этими показателями наблюдается прямая пропорция, которая прослеживается в любой конструкции тиристорного преобразователя.
Применение закона синуса для управления входящим напряжением также позволяет снизить уровень последнего. При этом управляющий ток снижается пропорционально импульсу, необходимому для открытия основного механизма. Сохранение постоянного управляющего напряжения не приводит к открытию тиристора в случае, когда его уровень ниже, чем у импульса управления.
Наращивание управляющего напряжения приводит к открытию тиристора при определенных условиях. Для этого необходимо обеспечить превышение показателя управляющего импульса. Используя возможность настройки характеристик управляющего импульса, можно менять угол открытия тиристора в диапазоне от нуля до 90 градусов.
В тех случаях, когда необходимо открыть тиристор на больший угол, управляющее напряжение меняется на переменное. В большинстве ситуаций амплитуда тока является синусоидальной. Когда напряжение достигает показателя, равного точке пересечения синусоидой величины управляющего импульса, происходит открытие тиристора.
Путем изменения интервала синуоиды в меньшую или большую сторону, также можно настраивать угол открытия пропускного механизма преобразователя. Данный тип управления работой тиристора называется горизонтальным и реализуется благодаря применению устройства под названием фазосмещатель. Обратный вид контроля – вертикальный – предполагает сдвиг синусоиды вверх либо вниз, что также приводит к изменению угла открытия проводника. Чтобы определить конечную величину, необходимую для воздействия на угол, необходимо выполнить вычисление суммы переменного управляющего напряжения и постоянного тока, формирующего синусоиду. Задать конкретный угол, на который необходимо открыть тиристор, возможно путем настройки постоянного напряжения.
Как только тиристор открыт на нужный угол, система сохраняет заданное положение, пока не будет окончен положительный полупериод. В этот промежуток времени управляющее напряжение не воздействует на функции проводника. Благодаря этой особенности становится возможным использование импульсного управления.
Импульсное управление заключается в подаче периодических волновых воздействий, равных по величине управляющему напряжению и имеющих положительный показатель. Для нормализации работы следует пускать импульсы в четко определенные моменты времени. Такой тип управления позволяет повысить четкость функционирования системы, в составе которой находится тиристорный преобразователь.
Путем изменения угла открытия тиристора можно настраивать форму импульсов, передаваемые на прибор-потребитель. Стоит учитывать, что такое управление приводит к изменению средневзвешенного уровня напряжения на зажимах потребляющего энергию устройства или механизма.
Использование трансформатора
Иногда для обеспечения более точного и стабильного управления работой тиристорных преобразователей используются сторонние узлы, например, трансформаторы. В этом случае первичная обмотка последних будет запитана непосредственно от питающей переменной сети. При этом вторичная обмотка будет включать в себя выпрямитель двухполупериодного типа, который обладает повышенным уровнем индуктивности в цепи, где присутствует постоянное напряжение.
С этим подходом становится возможным устранение эффекта пульсации тока, выпущенного из выпрямителя. Однако таким свойством обладают только двухполупериодные выпрямители, адаптированные под переменное напряжение. Амплитуда выпрямленного тока также должна соответствовать определенным характеристикам: в данном случае ее форма должна быть пилообразной либо прямоугольной. Поэтому выпрямитель также выполняет функцию преобразования формы переменного напряжения.
В процессе работы конденсаторы трансформатора попеременно получают электрический ток сразу двух форм. Прямоугольная амплитуда энергоснабжения наблюдается в заряжающих потоках. Обкладки в свою очередь накапливают пилообразный электрический ток, который впоследствии прикладывается к транзисторным базам. Если присутствует такой тип напряжения, то его классифицируют как опорное.
Каждый установленный в трансформаторе транзистор оснащен собственной базой, которая имеет выделенную цепь. В ней действует напряжение постоянного типа, которое приводит к появлению положительных потенциалов на всех транзисторных базах при условии, что пилообразный ток на обкладках конденсаторов равен нулю. При этом открытие транзисторов производится в момент образования на базе отрицательного потенциала.
Чтобы был запущен вышеописанный процесс, необходимо увеличить отрицательную величину опорного тока настолько, чтобы она превысила значение управляющего напряжения. Это производится в зависимости от текущего уровня последнего для определенного фазового угла. В этом случае время открытия транзистора будет напрямую зависеть от значения управляющего напряжения.
Если один или оба транзистора оказываются открытыми, вторая или третья первичные обмотки трансформаторной установки пропускают через себя импульс прямоугольной формы. В момент прохождения переднего фронта вторичная обмотка формирует объем электрического тока, который выбрасывается непосредственно на электрод тиристора, управляющий его открыванием.
Когда волна напряжения проходит и первичная обмотка задета задним фронтом импульса, во вторичной обмотке образуется такой же ток, но обратной полярности. Затем происходит замыкание этого напряжения на полупроводниковым диодом, который непрерывно проводит шунтирование вторичной обмотки трансформатора. В этом случае тиристорный преобразователь бездействует, так как не получает питание.
Если необходимо реализовать параллельное подключение тиристорного массива к двум трансформаторам, конфигурация схемы меняется. Для этого выполняется генерация двух импульсов с противоположными фазами, сдвиг которых равен 180 градусам.
6.2. Электроприводы по системе тиристорный преобразователь-двигатель постоянного тока
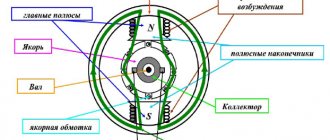
Момент, развиваемый двигателем, пропорционален току якоря и потоку возбуждения
. (6.3)
Из уравнений (6.1) и (6.2) легко получить зависимость скорости от тока якоря , которая называется электромеханической характеристикой двигателя
. (6.4)
Подставляя в (6.4) значения тока якоря из (6.3), получим уравнение механической характеристики двигателя
. (6.5)
Если двигатель во всех режимах работает с постоянным потоком возбуждения, то величину кФ
считают постоянной
. (6.6)
Тогда уравнения (6.2), (6.4) и (6.5) будут иметь вид:
(6.7)
(6.8)
(6.9)
Строго говоря, при изменении нагрузки на валу, когда изменяется ток якоря, поток двигателя вследствие размагничивающего влияния реакции якоря не остается постоянным. Для устранения влияния тока в цепи якоря на поток возбуждения на крупных машинах используют компенсационную обмотку, которая включается последовательно с обмоткой якоря и располагается на полюсах машины, усиливая поток возбуждения. Однако и для некомпенсированных машин в инженерных расчетах обычно пренебрегают размагничивающим действием реакции якоря, возлагая обеспечение линейности механической характеристики двигателя на замкнутые системы регулирования. В двигателях с возбуждением от постоянных магнитов реакция якоря практически не проявляется. Для более точного учета влияния реакции якоря на механические характеристики рекомендуем обратиться к [1-3].
Естественная механическая характеристика двигателя постоянного тока независимого возбуждения показана на рис.6.2.
Жесткость естественной механической характеристики β
для рассматриваемых двигателей обычно высока и равна
. (6.10)
Заметим, что в уравнениях (6.4), (6.5), (6.8), (6.9) членыиравны скорости холостого хода двигателяω0
. С учетом (6.10) получим удобное выражение для механической характеристики при постоянном потоке возбуждения
. (6.11)
Регулирование скорости двигателя постоянного тока независимого возбуждения может производиться тремя способами:
- Введением добавочного сопротивления в цепь якоря.
- Изменением величины напряжения, питающего якорную цепь двигателя, при постоянном потоке возбуждения.
- Изменением тока возбуждения, т.е. изменением магнитного потока двигателя.
При вводе добавочного сопротивления в цепь якоря скорость холостого ходаω0
остается неизменной, а изменяется наклон механических харак-теристик, т.е. умень-шается их жесткость (см.рис.6.3). Данный способ регулирова-ния скорости в настоящее время не используется, поско-льку введение доба-вочного сопротивле-ния сопряжено с потерями энергии в этом сопротивлении.
Основным способом регулирования скорости двигателей постоянного тока независимого возбуждения является регулирование напряжения, подводимого к якорю двигателя.
Изменение скорости при этом произво-дится вниз от основной (но-минальной) ско-рости, опреде-ляемой естест-венной харак-теристикой (рис.6.4). Повы-шение напря-жения питания выше номина-льного, как пра-вило, не рекомендуется, т.к. это может ухудшить коммутацию на коллекторе.
При уменьшении напряжения якоря уменьшается скорость холостого хода ω0
, а жесткость механических характеристик остается постоянной. Плавность регулирования, отсутствие дополнительных потерь энергии при регулировании и высокая жесткость механических характеристик составляют основные достоинства этого способа регулирования скорости.
Регулирование скорости выше основной производится уменьшением тока (потока) возбуждения (см.рис.6.5). При уменьшении магнитного потока Ф
согласно (6.5) происходит увеличение скорости холостого хода
ω0
и одновременно снижается жесткость механических характеристик двигателя (см.рис.6.5а).
Увеличение тока возбуждения выше номинального нецелесообразно, так как вследствие насыщения магнитной цепи машины существенного возрастания магнитного потока не произойдет, а тепловой режим двигателя нарушится. Электромеханические характеристики двигателя при ослаблении поля будут иметь вид, показанный на рис.6.5б. Эти характеристики, как следует из (6.4), на оси абсцисс сходятся в одной точке, соответствующей току короткого замыкания. Заметим, что масштаб по оси абсцисс на рис.6.5а и 6.5б различен.
При анализе механических характеристик при ослаблении поля следует иметь в виду, что при работе с постоянным статическим моментом ток якоря по мере ослабления потока увеличивается. Так, если статический момент на валу двигателя будет равен номинальному, то при номинальном напряжении якоря Uян
двигатель будет работать в т.1 (см.рис.6.5а). Если, например, ослабить поток возбуждения в 2 раза, то скорость холостого хода двигателя ω02 увеличивается в 2 раза. Если момент двигателя сохранится постоянным и равным номинальному, то двигатель будет работать в т.4. Однако, как это следует из (6.3) ток якоря при этом увеличится в 2 раза. Поэтому длительная работа двигателя в т.4 недопустима. Из этого примера следует, что одновременно с повышением скорости необходимо снижать длительно допустимый по условия нагрева (номинальный) момент. Линия номинального момента при ослаблении поля отображается кривой 1-2-3. Аналогично при ослаблении поля уменьшается допустимый максимальный момент, определяемый по условиям коммутации на коллекторе. Поскольку при ослаблении поля скорость увеличивается примерно пропорционально степени ослабления поля , а длительно допустимый момент уменьшается пропорционально отношению, то мощность двигателяостается примерно постоянной. Поэтому регулирование ослаблением поля называют регулированием с постоянной мощностью в отличие от регулирования изменением напряжения якоря при постоянном потоке возбуждения, которое называют регулированием с постоянным моментом.
Для электроприводов многих механизмов используют комбинированное управление, так называемое двух-зонное регулирование скорости. Механи-ческие характеристи-ки для этого способа управления показаны на рис.6.6. В первой зоне скорость двига-теля в диапазоне от нуля до основной скоростиω0н
регули-руется изменением напряжения якоря при постоянном потоке возбуждения
Фн
. Во второй зоне регулирование производится изменением тока (потока) возбуждения при постоянном номинальном напряжении якоря. Соответственно номинальный момент в первой зоне регулирования остается постоянным, а во второй зоне снижается пропорционально уменьшению потока. Максимально допустимая скорость двигателя при ослаблении поля определяется механической прочностью якоря и условиями коммутации на коллекторе. Эта скорость указывается в каталоге на двигатели.
Ослабление поля используется и при однозонном регулировании скорости для установления основной (максимальной) скорости. В отличие от синхронных и асинхронных двигатели постоянного тока не имеют жестко определенной номинальной скорости. В каталогах указывается номинальная и максимальная скорости. Например, если указано, что двигатель мощностью 100кВт имеет номинальную скорость 1000об/мин и максимальную – 2000об/мин, то основная скорость может быть установлена в этих пределах выбором соответствующего значения тока возбуждения. Например, — 1600об/мин; при этом мощность двигателя останется равной 100кВт. Это удобно при конструировании кинематической схемы рабочей машины.
Для высокодинамичных электроприводов небольшой мощности (до 20кВт) эффективно использование высокомоментных двигателей постоянного тока с возбуждением от постоянных магнитов. Благодаря применению высокоэнергетических постоянных магнитов на основе редкоземельных элементов (например, сплава самарий-кобальт) эти двигатели особенно при малых скоростях вращения (когда условия коммутации тока на коллекторе более легкие) способны развивать большой крутящий момент. Отношение пускового момента такого двигателя к номинальному составляет 10-12, в то время как у двигателей с электромагнитным возбуждением это отношение не превышает 2-4. Такие двигатели находят применение в металлорежущих станках с числовым программным управлением, в приводах роботов и следящих электроприводах различного назначения [1-9].
В некоторых случаях двигатели независимого возбуждения снабжают «легкой» обмоткой последовательного возбуждения, создающей м.д.с. при номинальном токе якоря около 20% от м.д.с. обмотки независимого возбуждения. Такие двигатели смешанного возбуждения применяются в случаях многодвигательного привода, когда два или несколько двигателей работают на один вал или их валы связаны механически (например, лентой конвейера), В этом случае скорость всех двигателей будет одинаковой, но из-за неидентичности характеристик двигателя возникает задача равномерного распределения нагрузки между ними. Благодаря наличию последовательной обмотки возбуждения в более нагруженном двигателе увеличивается поток и возрастает противоэдс якоря, что ведет к снижению тока якоря. Напротив, менее нагруженный двигатель будет иметь несколько меньший поток, его э.д.с. будет ниже и ток якоря соответственно возрастает. Таким образом, благодаря наличию слабой последовательной обмотки происходит выравнивание тока якоря между двигателями, питающимися от общего источника напряжения.
Электродвигатели постоянного тока независимого возбуждения могут работать в трех тормозных режимах: режиме рекуперативного торможения, динамического торможения и торможения противовключением.
Режим рекуперативного генераторного торможения отражается на механических характеристиках во втором квандранте, когда скорость двигателя превышает скорость холостого хода ω>ω0
(рис.6.7). При этом э.д.с. якоря
Ея
превышает величину напряжения питания якорной цепи
Ея>Uя
и ток в якорной цепи пойдет под действием э.д.с. якоря
Ея
; знак тока будет противоположен знаку напряжения питания, что означает, что энергия торможения отдается в сеть питания постоянного тока. Отсюда следуют три условия существования режима рекуперативного торможения.
- Ц
Рис.6.7. Механические характеристики двигателя постоянного тока в режиме рекуперативного торможения
епь питания должна обеспечивать возможность протекания тока встречно напряжению источ-ника питания; это условие особенно важно в случае пита-ния двигателя пос-тоянного тока от полупроводниковых преобразователей, элементы которых обладают односторонней проводимостью тока (см.§6.2).
- Источник питания должен обладать возможностью воспринимать отдаваемую двигателем энергию и передавать ее в питающую сеть; так режим рекуперативного торможения невозможен, если привод получает питание от автономной дизель-генераторной установки.
- Для того, чтобы рекуперативное торможение было возможно в пределах заданного диапазона регулирования скорости, для регулирования должен применяться способ изменения напряжения, подводимого к якорной цепи двигателя.
В режиме рекуперативного торможения уравнения (6.1) и (6.5) принимают вид:
Основными достоинствами рекуперативного торможения являются: энергетическая эффективность, связанная с полезным использованием энергии торможения, высокая жесткость механических характеристик, плавный переход из двигательного в тормозной режим на одной и той же характеристике. Благодаря такому характеру механических характеристик улучшается качество управления приводом. Вернемся к рассмотрению рис.6.7. Пусть двигатель работал в т.1 в двигательном режиме со статическим моментом Мс
. Если оператор хочет уменьшить скорость, он уменьшает напряжение источника питания с
Uя
1 до
Uя
2. В первый момент скорость двигателя из-за механической инерции не может измениться, и двигатель переходит на работу в т.2. При этом на валу двигателя возникает тормозной момент, равный сумме тормозного момента двигателя и статического момента. Скорость двигателя быстро снижается до скорости
ω0
2 и далее под действием статического момента до скорости, определяемой т.3.
Вторым возможным тормозным режимом является режим динамического торможения. В этом режиме якорь двигателя отключается от источника постоянного тока (см.рис.6.8) и замыкается на сопротивление динамического торможения. Питание обмотки возбуждения при этом должно быть обязательно сохранено. В указанном режиме двигательМ
работает как генератор постоянного тока, нагруженный на сопротивление
Rдт.
Энергия торможения расходуется на нагрев сопротивления
Rдт
и обмоток цепи якоря двигателя.
Механические характеристики при динамическом торможении представлены на рис.6.9. Если Rдт=0
, якорная цепь двигателя будет замкнута накоротко и механическая характеристика (при
Ф=Фн
) будет иметь жесткость естественной характеристики (см.6.10). При увеличении
Rдт
жесткость характеристик будет уменьшаться в соотношении , и механические характеристики будут линейными и расходиться веером из начала координат.
Как следует из (6.5), при UЯ=0
уравнение механических характеристик динамического торможения будет:
.
Недостатками режима динамического торможения являются: потери энергии торможения, расходуемой на нагрев элементов привода, и невозможность торможения привода до полной его остановки.
Достоинством режима динамического торможения является его высокая надежность, определяемая тем, что этот режим может осуществляться при исчезновении питающего напряжения и в случае выхода из строя источника питания цепи якоря, когда режим рекуперативного торможения становится невозможен. Исходя из этого, динамическое торможение в приводах постоянного тока часто используется в качестве средства аварийного торможения.
Торможение противовключением не характерно для двигателей постоянного тока независимого возбуждения. Этот режим может использоваться в приводах малой мощности с широтно-импульсными регуляторами тока, позволяющими ограничить ток торможения допустимой величиной.
Для питания двигателей постоянного тока независимого возбуждения используются регулируемые источники питания:
- электромашинные агрегаты – генератор постоянного тока – двигатель переменного тока (система Г-Д);
- тиристорные преобразователи (выпрямители) с фазовым управлением (система ТП-Д);
- полупроводниковые выпрямители с регулированием величины выпрямленного напряжения методом широтно-импульсного регулирования (ШИР-Д).
Система генератор-двигатель, в которой двигатель постоянного тока получает питание от электромашинного агрегата, в настоящее время морально устарела и в стационарных установках не применяется. Система Г-Д продолжает использоваться для мобильных установок, например экскаваторов.
Основной системой регулируемого электропривода с двигателями постоянного тока является система ТП-Д (тиристорный преобразователь – двигатель постоянного тока), наиболее распространенные схемы которой приведены на рис.6.10.
О
Рис.6.10. Силовые схемы электроприводов ТП-Д
а) однофазная мостовая нереверсивная
б) трехфазная мостовая нереверсивная схема
в) трехфазная мостовая встречно-параллельная реверсивная схема с раздельным управлением
снову схем тиристорных преобразователей составляют полууправляемые силовые полупроводниковые приборы – тиристоры. Неполная управляемость тиристоров определяется тем, что включение тиристора контролируется системой управления (СИФУ) – при подаче отпирающего импульса на управляющий электрод тиристора последний открывается и остается открытым после снятия отпирающего импульса. Закрывается тиристор после изменения полярности напряжения анод-катод и спадания тока до нуля.
Тиристорный преобразователь в схемах электропривода постоянного тока выполняет две функции: выпрямление переменного напряжения питающей сети и регулирование средней величины выпрямленного напряжения.
Принцип регулирования величины среднего значения выпрямленного напряжения тиристорного преобразователя с импульсно-фазовым управлением рассмотрим на примере однофазной мостовой схемы (рис.6.10а).
Если отпирающие импульсы на тиристоры VS1 и VS4 (и соответственно тиристоры VS3 и VS2 при другой полуволне синусоиды питающего напряжения) подаются в момент естественного открывания, когда напряжение катод-анод становится положительным, то среднее выпрямленное напряжение, определяемое заштрихованной площадью на рис.611а), будет максимальным и равным:
, (6.12)
где Uл
– линейное напряжение на стороне переменного тока;
ксх
– коэффициент схемы выпрямления, который равен: для однофазной мостовой схемы – 0,9; для трехфазной мостовой схемы – 1,35; для трехфазной нулевой схемы – 0,675.
Если отпирающие импульсы на тиристоры будут подаваться с запаздыванием относительно момента естественного открывания на угол α
(угол управления тиристорами), то среднее выпрямленное напряжение преобразователя будет уменьшаться, как это показано на рис.6.11б. При этом тиристоры VS1 и VS2 будут проводить ток до тех пор, пока не откроются тиристоры VS3 и VS4, т.е. и в то время, когда напряжение катод-анод будет отрицательным. Это объясняется тем, что в цепи выпрямленного тока имеется достаточно большая индуктивность обмотки якоря двигателя
Lя,
и ток будет протекать под действием э.д.с. самоиндукции. Если же в цепи выпрямленного тока не было бы индуктивности (чисто активная нагрузка), то ток прекратился бы при переходе анодного напряжения через нуль; ток в этом случае был бы прерывистым. При большом значении индуктивности
Lя
соотношение между средним выпрямленным напряжением преобразователя и углом
α
будет:
(6.13)
Среднее выпрямленное напряжение определяется разностью заштрихованных площадей. При значении угла регулирования среднее выпрямленное напряжение (см.рис.6.11в) будет равно нулю.
Тиристорный преобразователь может работать в выпрямительном и в инверторном режимах. Выпрямительный режим имеет место при углах регулирования . При этом среднее выпрямленное напряжение должно быть больше эдс в цепи выпрямленного тока (противоэдс якоря двигателя). Направление выпрямленного тока совпадает со знаком выпрямленного напряжения преобразователя.
Если угол α
увеличить сверх , то площадь отрицательной полуволны, при которой открыты тиристоры, будет больше площади положительной полуволны (см.рис.6.11г) и, следовательно, среднее выпрямленное напряжение преобразователя будет отрицательным, что следует также из формулы (6.13).
Под действием отрицательного напряжения преобразователя ток пойти не может из-за односторонней проводимости тиристоров. Поэтому инверторный режим преобразователя возможен при соблюдении трех условий:
- В цепи выпрямленного тока должен быть источник э.д.с., величина которой превосходит среднее значение выпрямленной противоэдс инвертора; в схемах тиристорного привода постоянного тока – э.д.с. якоря двигателя должна быть больше Ed
инвертора .
- Источник эдс (якорь двигателя) должен быть так подключен к преобразователю, чтобы было возможно протекание тока под действием э.д.с. якоря.
- Угол управления тиристорами должен быть больше .
При соблюдении этих условий двигатель постоянного тока будет работать в генераторном режиме, вырабатывая энергию постоянного тока, которая преобразуется тиристорным преобразователем в энергию переменного тока и отдается в питающую сеть. Инверторный режим преобразователей используется в приводах для осуществления рекуперативного торможения двигателей. Схемы тиристорного привода, позволяющие осуществлять этот режим, рассмотрены в следующем параграфе.
Как источник напряжения постоянного тока тиристорный преобразователь характеризуется э.д.с. Ed,
регулируемой посредством угла управления
α
, и внутренним сопротивлением
Rп
, состоящим из двух слагаемых.
(6.14)
Rа
– активное сопротивление источника питания на стороне переменного тока (сетевого реактора или трансформатора);
Rγ
– условное сопротивление, связанное с падением напряжения в процессе коммутации тиристоров.
Преобразователи подсоединяются к питающей сети или через трансформатор, служащий для согласования напряжения питающей сети и двигателя, или через сетевой реактор.
Сетевые реакторы в бестрансформаторных схемах питания выполняют две функции: ограничивают ток короткого замыкания в преобразователе и уменьшают негативное влияние преобразователя на питающую сеть. И трансформаторы, и реакторы обладают активным и индуктивным сопротивлением.
Активное сопротивление фазы трансформатора, приведенное ко вторичной обмотке, может быть определено по паспортным данным трансформатора ,
где: I
2
ф
– номинальный фазный ток вторичной обмотки трансформатора;
ΔРкз
– потери короткого замыкания трансформатора.
П
Рис.6.12. Коммутация тока между тиристорами в однофазном мостовом преобразователе
роцесс коммутации тирис-торов поясняется рис.6.12. Вернемся к рассмотрению схемы рис.6.10а. Пусть пре-образователь работает с уг-лом
α
. До момента
t
1 ток про-водят тиристоры VS1 и VS4. В момент времени
t
1 подают-ся отпирающие импульсы на тиристоры VS3 и VS2
.
Последние отпираются. Однако из-за наличия индуктивности на стороне сети ток через тиристоры VS1и VS4 не может мгновенно упасть до нуля, и некоторое время, измеряемое углом коммутации
γ
, одновременно будут открыты все четыре вентиля, которые шунтируют цепь нагрузки. В результате среднее выпрямленное напряжение снижается на величину, пропорциональную заштрихованной площади. Это падение напряжения зависит от величины выпрямленного тока
Id
и будет равно:
.
Условно величину можно принять за некоторое сопротивлениеRγ
, вызывающее падение напряжения в преобразователе
, (6.15)
где: m
– число коммутаций за период;
Ха
– индуктивное сопротивление на стороне переменного тока;
,
здесь U2ф
– фазное напряжение вторичной обмотки трансформатора;
ек
– напряжение короткого замыкания трансформатора, %.
Следует иметь в виду, что падение напряжения на сопротивлении Rγ
не связано с потерями мощности в нем, поскольку оно вызвано индуктивным сопротивлением на стороне переменного тока; оно ухудшает коэффициент мощности преобразователя.
Таблица 6.1.