Преобразование электрической энергии в кинетическую осуществляется при помощи различных типов электродвигателей. Чаще всего электродвигатели выполняют функцию электроприводов машин и механизмов, применяются для обеспечения работы насосного оборудования, вентиляционных систем и многих других агрегатов и устройств. В связи с таким широким применением, особую актуальность приобретает расчет мощности электродвигателя. Для этих целей разработано много различных методов, позволяющих выполнить расчеты, применительно к конкретным условиям эксплуатации.
Основные типы электродвигателей
Существует множество типов и модификаций электродвигателей. Каждый из них обладает собственной мощностью и другими параметрами.
Основная классификация разделяет эти устройства на электродвигатели постоянного и переменного тока. Первый вариант применяется значительно реже, поскольку для его эксплуатации требуется обязательное наличие источника постоянного тока или устройства, преобразующего переменное напряжение в постоянный ток. Выполнение данного условия в современном производстве потребует значительных дополнительных затрат.
Но, несмотря на существенные недостатки, двигатели постоянного тока имеют высокий пусковой момент и стабильно работают даже при больших перегрузках. Благодаря своим качествам, эти агрегаты нашли широкое применение на электротранспорте, в металлургической и станкостроительной отрасли.
Тем не менее, большинство современного оборудования работает с двигателями переменного тока. В основе действия этих устройств лежит электромагнитная индукция, которую создает в магнитном поле проводящая среда. Магнитное поле создается с помощью обмоток, обтекаемых токами, или с применением постоянных магнитов. Электродвигатели, работающие на переменном токе, могут быть синхронными и асинхронными.
Использование синхронных электродвигателей практикуется в оборудовании, где требуется постоянная скорость вращения. Это генераторы постоянного тока, насосы, компрессоры и другие аналогичные установки. Различные модели отличаются собственными техническими характеристиками. Например, значение скорости вращения может находиться в пределах 125-1000 оборотов в минуту, а мощность достигает 10 тыс. киловатт.
Во многих конструкциях имеется короткозамкнутая обмотка, расположенная на роторе. С ее помощью, в случае необходимости, производится асинхронный пуск, после чего синхронный двигатель продолжает работу в обычном режиме, максимально сокращая потери электрической энергии. Эти двигатели отличаются небольшими размерами и высоким коэффициентом полезного действия.
Гораздо более широкое распространение в производственной сфере получили асинхронные двигатели переменного тока. Они отличаются очень высокой частотой вращения магнитного поля, значительно превышающей скорость вращения ротора. Существенным недостатком этих устройств считается снижение КПД до 30-50% от нормы при низких нагрузках. Кроме того, во время пуска параметры тока становятся в несколько раз больше по сравнению с рабочими показателями. Данные проблемы устраняются путем использования частотных преобразователей и устройств плавного пуска.
Асинхронные двигатели используются на тех объектах, где требуются частые включения и выключения оборудования, например, в лифтах, лебедках, и других устройствах.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Расчет мощности двигателя формула для компрессора
Выбирая электродвигатель, наиболее подходящий для работы того или иного компрессора, необходимо учитывать продолжительный режим работы данного механизма и постоянную нагрузку. Расчет требующейся мощности двигателя Рдв осуществляется в соответствии с мощностью на валу основного механизма. В этом случае следует учитывать потери, возникающие в промежуточном звене механической передачи.
Дополнительными факторами являются мощности, назначение и характер производства, на котором будет эксплуатироваться компрессорное оборудование. Они оказывают определенное влияние, в связи с чем оборудование может потребовать незначительных, но постоянных регулировок для поддержки производительности на должном уровне.
Определение по габаритам
Еще один способ — проведение замеров и вычислений. Многие из тех, кто интересуется, как узнать мощность трехфазного двигателя, предпочитают именно его. Вам понадобятся следующие данные:
Диаметр сердечника в сантиметрах (D). Он измеряется по внутренней части статора. Также необходима длина сердечника с учетом отверстий вентиляции.
Частота валового вращения (n) и частота сети (f).
Через них вычислите показатель полюсного деления. D умножьте на n и на число Пи — назовем это показание А. 120 умножьте на f — это В. Разделите А на В.
Как видите, чтобы подсчитать значение, достаточно вспомнить школьный курс математики.
Формула расчета для вентиляторов
Вентиляторы широко применяются в самых разных областях. Устройства общего назначения работают на чистом воздухе, при температуре ниже 80. Воздух с более высокой температурой перемещается с помощью специальных термостойких вентиляторов. Если приходится работать в агрессивной или взрывоопасной среде, в этих случаях используются модели антикоррозийных и взрывобезопасных устройств.
В соответствии с принципом действия, вентиляторные установки могут быть центробежными или радиальными и осевыми. В зависимости от конструкции, они развивают давление от 1000 до 15000 Па. Поэтому мощность, потребная для привода вентилятора, рассчитывается в соответствии с давлением, которое необходимо создать.
С этой целью используется формула: Nв=Hв·Qв/1000·кпд, в которой Nв – мощность, потребная для привода (кВт), Hв – давление, создаваемое вентилятором (Па), Qв – перемещаемый объем воздуха (м3/с), кпд – коэффициент полезного действия.
Для расчета мощности электродвигателя используется формула:, где значения параметров будут следующие:
- Q – производительность агрегата;
- Н – давление на выходе;
- ηв – коэффициент полезного действия вентилятора;
- ηп – коэффициент полезного действия передачи;
- кз – коэффициент запаса, зависящий от мощности электродвигателя. При мощности до 1 кВт кз = 2; от 1 до 2 кВт кз = 1,5; при 5 кВт и выше кз = 1,1-1,2.
Данная формула позволяет рассчитывать мощность электродвигателей под центробежные и осевые вентиляторы. Для центробежных конструкций КПД составляет 0,4-0,7, а для осевых – 0,5-0,85. Другие расчетные характеристики имеются в специальных каталогах для всех типов электродвигателей.
Запас мощности не должен быть слишком большим. Если он будет слишком большой, КПД привода заметно снизится. Кроме того, в двигателях переменного тока может снизиться коэффициент мощности.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
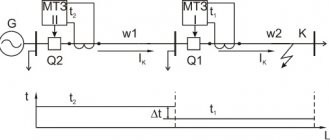
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.
Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Характеристики трехфазной системы
Трехфазная система электропитания характеризуется несколькими значениями напряжения и тока. Все зависит от того, между какими точками схемы производятся измерения:
- между фазным проводом и нейтралью – фазное напряжение Uф;
- между отдельными фазами – линейное Uл.
Соотношение между данными параметрами:
При симметричном распределении нагрузки токи во всех проводах равны. В четырехпроводной схеме (с заземленным нулем) ток в нулевом проводнике отсутствует, поэтому даже при обрыве нуля сеть продолжает нормально функционировать.
В том случае, когда потребление энергии по фазам различается, в нейтральном проводе протекает некоторый ток. Полный обрыв нейтрального проводника вызывает перекос фаз, поэтому напряжение на проводах может измениться в диапазоне от нуля до линейного.
Реактивный характер нагрузки учитывается коэффициентом мощности cosϕ. Данная величина пришла из теории комплексных чисел, которые используются, когда необходимо рассчитать параметры цепей переменного тока. В случае активной нагрузки cosϕ=1, но, чем более реактивный характер имеют потребители, тем больше коэффициент уменьшается, показывая, как снижается реальная мощность относительно полной.
Важно! Поэтому для правильного расчета и уменьшения нагрузки на генераторное оборудование в реактивных цепях устанавливают корректоры коэффициента мощности. Цепи с корректором приближают коэффициент cosϕ к единице.
История
Модель индукционного (двухфазного) двигателя Н. Теслы. Музей Николы Теслы, Белград.
Первый трёхфазный асинхронный двигатель, изобретённый Доливо-Добровольским. Немецкий музей (Мюнхен).
Трёхфазный асинхронный двигатель Н. Теслы. Музей Николы Теслы, Белград.
В 1888 году Галилео Феррарис опубликовал свои исследования в статье для Королевской академии наук в Турине (в том же году Тесла получил патент США), в которой изложил теоретические основы асинхронного двигателя
Заслуга Феррариса в том, что, сделав ошибочный вывод о небольшом КПД асинхронного двигателя и о нецелесообразности применения систем переменного тока, он привлек внимание многих инженеров к проблеме совершенствования асинхронных машин. Статья Галилео Феррариса, опубликованная в журнале «Атти ди Турино», была перепечатана английским журналом и в июле 1888 года попала на глаза выпускнику Дармштадтского высшего технического училища, выходцу из Российской Империи Михаилу Осиповичу Доливо-Добровольскому
Уже в 1889 году Доливо-Добровольский получил патент на трехфазный асинхронный двигатель с короткозамкнутым ротором типа «беличье колесо» (германский патент № 51083 от 8 марта 1889 года под названием «Anker für Wechselstrommotoren»), а в 1890-м — патенты в Англии № 20425 и Германии № 75361 на фазный ротор с кольцами и пусковыми устройствами. Данные изобретения открыли эру массового промышленного применения электрических машин. В 1903 году в Новороссийске построен элеватор с первой в мире промышленной сетью переменного трехфазного тока, все установки которой изготовлены под руководством Доливо-Добровольского. На данном элеваторе, также впервые в мире, применены трехфазные трансформаторы и асинхронные двигатели с фазным ротором. В настоящее время асинхронный двигатель Доливо-Добровольского является самым распространенным электродвигателем.
Как узнать свою схему
Для правильного определения и расчета мощности требуется знание нескольких факторов:
- Количества фаз питания;
- Способа соединения потребителей.
При однофазном подключении используется два провода:
- Фазный провод;
- Нулевой провод.
Для трехфазной сети характерно наличие трех или четырех проводников (подключение с заземленной нейтралью). При этом используется две различных схемы включения:
- «Треугольник». Каждая нагрузка подсоединяется с двумя соседними. Напряжение каждой фазы подводится к точкам соединения потребителей.
- «Звезда». Все три потребителя соединяются в одной точке. Ко вторым концам подключаются фазы питания. Это схема с изолированной нейтралью. В схеме с заземленной нейтралью точка соединения потребителей подключается к нулевому проводнику.
Соединение источника и потребителей
Ссылки по теме
- Правила технической эксплуатации электроустановок потребителей / Нормативный документ от 9 февраля 2007 г. в 02:14
- Библия электрика / Нормативный документ от 14 января 2014 г. в 12:32
- Справочник по электрическим сетям 0,4-35 кВ и 110-1150 кВ. Том 10 / Нормативный документ от 2 марта 2009 г. в 18:12
- Кабышев А.В., Тарасов Е.В. Низковольтные автоматические выключатели / Нормативный документ от 1 октября 2022 г. в 09:22
- Правила устройства воздушных линий электропередачи напряжением до 1 кВ с самонесущими изолированными проводами / Нормативный документ от 30 апреля 2008 г. в 15:00
- Маньков В.Д. Заграничный С.Ф. Защитное заземление и зануление электроустановок / Нормативный документ от 27 марта 2022 г. в 09:05
- Князевский Б.А. Трунковский Л.Е. Монтаж и эксплуатация промышленных электроустановок / Нормативный документ от 17 октября 2019 г. в 12:36