Устройство синхронного электродвигателя
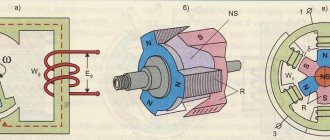
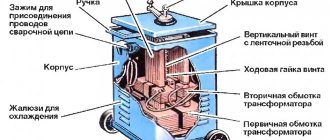
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
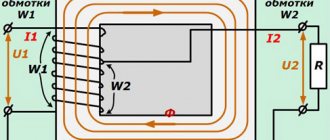
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Конструктивное решение
Подобно любому электроприводу, синхронные двигатели (СД) представляют собой преобразователи, превращающие электроэнергию в механическую работу. Они также относятся к обратимым механизмам и могут работать в генераторном режиме. В этом случае электрооборудование не является приводами подвижных частей производственных или инженерных установок, а наоборот выступает в качестве источника электроэнергии. Ярким примером подобного применения могут служить гидро- или турбогенераторы.
Аналогично асинхронным моторам СД работают от источника переменного тока, имеют два основных рабочих узла – статор и ротор. Первый обладает абсолютно идентичной конструкцией, является стационарным элементом устройства и известен также как индуктор или индукторное колесо. Его основные компоненты:
- корпус с расположенной на нем коробкой для электроподключений;
- шарикоподшипники, предназначенные для опоры роторного блока;
- опорные элементы подшипников;
- вентилятор, обеспечивающий отвод тепла во время работы электропривода;
- защитный кожух, отделяющий вращающийся вентилятор от корпуса.
Стальной корпус индуктора имеет цилиндрическую форму, может быть сборным или выполняться из отдельных элементов. Во внутренней части находится стальной сердечник, набранный из отдельных полос толщиной около 0,5 мм. Все пластины надежно изолированы между собой. Наружные полосы имеют специальные пазы, в которых располагаются фазные электрические цепи (обмотки).
Конструктивное исполнение (цельное или сборное) зависит от габаритных размеров и, соответственно, мощности электромотора. Статоры небольших механизмов выполняются в виде неразъемного изделия, более мощные устройства имеют сборную структуру. Подобное решение продиктовано трудностями производства, транспортирования, монтажа и ремонта. Индукторы также могут иметь разное расположение обмоток, в том числе распределенное или сосредоточенное.
Второй функциональный узел – ротор – обладает индивидуальными особенностями построения, вращается и является непосредственным инструментом передачи механической энергии приводимым рабочим узлам. Его также называют якорем. Именно структурой роторного блока отличаются между собой электроприводы синхронного и асинхронного типа. В зависимости от нагрузки, которую должен воспринимать СД и, соответственно, параметров его мощности, роторный механизм, имеющий в своем составе сердечник, конструируют разными способами. Это может быть:
- синхронный двигатель с постоянными магнитами (СДПМ) на якорном узле, обеспечивающими магнитоэлектрическое возбуждение;
- электромашина с электромагнитами, осуществляющими электромагнитное возбуждение.
Первый вариант предназначен для электроприводов небольшой мощности, второй – для электроустройств, рассчитанных на восприятие больших нагрузок.
Постоянные магниты выполняются из магнитотвердых материалов (прецизионных сплавов), обладающих высокой остаточной магнитной индукцией. Их характерная особенность заключается в способности сохранять длительное время состояние намагниченности. Магнитотвердые изделия бывают разной формы и являются автономными источниками (не потребляющими энергии) магнитного поля. Относительно способа установки магнитов СД делятся на электродвигатели с поверхностным и встроенным расположением магнитных элементов.
Электромагниты, как следует из самого названия, связаны с электрическим током. Это устройство состоит из ферромагнитного сердечника и обмотки, которая, находясь под напряжением, инициирует возникновение магнитного потока вокруг сердечника. Назначение любого электромагнита – привести в движение подвижную часть магнитопровода. Таким инструментом служит якорь, который и передает механические усилия рабочим узлам оборудования.
Генераторный режим
Особенность синхронных машин обеспечивать длительно постоянные обороты, а также их обратимость способствует большему распространению в качестве генератора переменного тока. На электростанциях применяют турбогенераторы, у которых в качестве первичного двигателя используют паровые турбины и гидрогенераторы с приводом от гидравлических турбин.
Турбогенераторы – быстроходные неявнополюсные агрегаты, устанавливаемые на ТЭЦ горизонтально. Они имеют большую длину при сравнительно малом диаметре. Гидрогенераторы – это тихоходные явнополюсные установки, располагаемые на ГЭС вертикально. Они обладают большим диаметром при относительно малой высоте.
Генераторы описываются следующими основными характеристиками:
- холостого хода, представляющего собой зависимость Е0 = f (Iв);
- внешними, описываемыми функцией U = f (I);
- регулировочными, характеризуемыми зависимостью Iв = f (I).
Роторный механизм магнитоэлектрических генераторов при небольшой мощности выполняется типа «звездочка», при большей нагрузке – «когтеобразным». При значительной мощности (от десятков до сотен киловатт) конструкция генераторов становится похожей на исполнение нормальных явнополюсных синхронников.
Управляющая система
Управление приводной машиной осуществляется автоматизированными устройствами, в качестве которых используются преобразователи частоты или сервоприводы. Также функция управления может быть реализована специальными системами контроля. Основанием для выбора того или иного метода всегда является задача, которую должен выполнять электропривод. На практике применяются следующие способы управления:
- синусоидальное – делится на скалярное и векторное;
- трапецеидальное – может быть с обратной связью и без нее.
Скалярная схема относится к простым способам управления. Она не является оптимальной, не подходит для задач, где нагрузка меняется, поскольку существует вероятность потери управляемости (выхода из синхронизма). Векторный метод подразделяется на полеориентированное и прямое управление моментом. Первый вариант может реализовываться с датчиком положения или без него. Посредством датчика и микроконтроллера достигается плавная и точная установка положения вала и требуемые характеристики скорости СД с большим диапазоном регулирования. Бездатчиковый метод возможен только для явнополюсных электроприводов.
Векторное прямое управление отличается простой схемой, хорошими динамическими характеристиками, большим диапазоном регулирования и отсутствием датчика положения. К недостаткам этого способа относят высокие моментные и токовые пульсации.
Трапецеидальная схема управления без обратной связи относится к простейшим управляющим методам и обладает теми же минусами, что и скалярная. В случае наличия обратной связи возможно два ее варианта: с датчиками или без. Первый метод предусматривает установку трех встроенных датчиков Холла, которые обеспечивают определение углового положения вала. Второй требует более мощной системы управления и не подходит для работы на низких оборотах.
V — образные характеристики
V- образные характеристики представляют собой зависимость тока якоря I
и коэффициента мощности
cosj
двигателя от тока возбуждения
i
в при постоянных значениях напряжения обмотки якоря
U
и его частоты
f
и постоянной отдаваемой механической мощности
P2
. Эти характеристики отражают важную особенность синхронных двигателей
—возможность регулирования их реактивной мощности и cosj
.
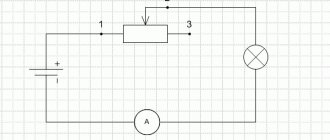
Рассмотрим V — образные характеристики двигателей на примере неявнополюсной машины. Необходимые пояснения даны с помощью упрощенных векторных диаграмм синхронного двигателя, представленных на рис. 12.3.
Если принять потери в обмотке и стали якоря, механические и добавочные потери постоянными, то при P
2= const подводимая к обмотке якоря мощность также постоянна,
P
1=
mUIcosj
= const, и, следовательно, активная составляющая тока якоря также неизменна —
I
а=
Icosj
=const. Поэтому на векторной диаграмме (рис.12.3) конец вектора тока якоря
I
при разных значениях тока возбуждения
i
в скользит по прямой АВ. Для каждого значения
I
величина
iв
может быть определена из уравнения токов синхронной машины , отражающего уравнение МДC . Так,
iв
d представляет собой результирующую МДС в зазоре
Fd
в масштабе тока возбуждения,
I¢
— МДС реакции якоря
F¢
a в масштабе тока возбуждения или приведенный ток якоря. Ток возбуждения прямо пропорционален МДС
F
в обмотки возбуждения.
Величина iв
d может быть определена по результирующей ЭДС
E
d обмотки якоря , индуктированной результирующим магнитным полем воздушного зазора. Если пренебречь для простоты сопротивлениями рассеяния
x
sa= 0 и активным
r
a= 0, то и, следова —
Рис. 12.3. Упрощённые векторные диаграммы синхронного двигателя
тельно, i
вd »
const
. Вектор , как и вектор результирующего потока в зазоре , опережает на 90 о . Вектор совпадает по направлению с током якоря, и конец его скользит по прямой A’B’, параллельной линии АВ, так как
I’
прямо пропорционален току якоря.
На рис. 12.3 построены векторные диаграммы токов для четырёх точек V
-образной характеристики и получены токи возбуждения для соответствующих им токов якоря. Для точки 1 на рис.12.3 выполнено также построение векторной диаграммы напряжений по уравнению , где
Е
— ЭДС, индуктированная в обмотке якоря полем обмотки возбуждения;
x
c — синхронное индуктивное сопротивление.
Преимущества и область применения
Благодаря освоению производства прецизионных сплавов стало возможным конструировать и успешно применять СДПМ с технологией магнитоэлектрического возбуждения. По сравнению с устройствами на электромагнитах более простая конструкция этого типа электрооборудования обусловила ряд практических преимуществ:
- повышенную надежность;
- увеличение коэффициента полезного действия, вследствие отсутствия потерь на возбуждение;
- уменьшение габаритов и массы при повышенных частотах и небольшой мощности;
- возможность автономного использования как генератора увеличенной частоты малой и средней мощности.
В качестве электроприводов СДПМ не получили достаточного распространения по причине плохих пусковых свойств. Ограниченность применения также вызвана их повышенной стоимостью по сравнению с СД других типов. Это обусловлено сложностью и дополнительными затратами на изготовление и обработку магнитотвердых материалов, обладающих большой коэрцитивной силой. Поэтому подобные электроприводы производят на небольшие мощности для применения в системах производственной автоматики и приборостроении.