Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.
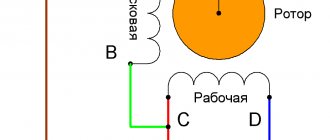
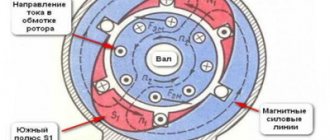
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
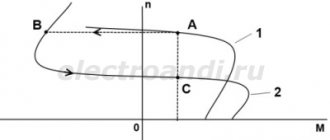
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
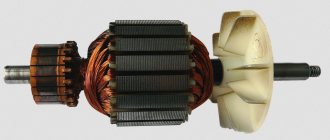
Асинхронный трехфазный двигатель, как и все электрические двигатели, состоит из двух основных частей: неподвижного статора и вращающегося внутри него ротора. Как статор, так и ротор имеют обмотки из витков медного или алюминиевого проводника, уложенные в пазах. Обмотка ротора может быть либо фазной, у которой концы каждой фазы выводятся на контактные кольца, насаженные на валу ротора, либо замкнутой накоротко и не имеющей выводов. Механические характеристики асинхронных двигателей с короткозамкнутым ротором в большей степени зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам различаются двигатели с нормальным, глубоким пазом, а также с двойной роторной обмоткой (так называемая «двойная беличья клетка»). Принцип действия асинхронного трехфазного двигателя основан на том, что переменный ток, проходя по трехфазной обмотке статора, создает вокруг него магнитное поле, вращающееся с частотой питающей сети переменного тока. Силовые линии поля пересекают витки обмотки ротора (замкнутой либо накоротко, либо через сопротивление) и индуктируют в ней электродвижущую силу (ЭДС), вызывающую в обмотке ротора ток. Ток ротора в свою очередь создает магнитное поле, взаимодействующее с вращающимся поем статора и заставляющее ротор двигателя вращаться в направлении, соответствующем направлению вращения поля статора. Скорость вращения магнитного потока статора зависит от частоты сети и от числа полюсов статорной обмотки и определятся формулой: nc=60fc/p [об/мин], (1-1) где fc – частота сети; р – число пар полюсов статорной обмотки. Скорость вращения ротора меньше скорости вращения поля статора, найденной по формуле (1-1), на величину скольжения. Это условие необходимо для работы асинхронного двигателя, так как, если бы ротор вращался с той же угловой скоростью, что и вращающееся поле статора, т. е. синхронно, то витки роторной обмотки не пересекались бы силовыми линиями поля статора и в роторе не индуктировался бы ток, а, следовательно, исчезла бы причина, вызывающая его вращение. Скольжение выражается в относительных единицах или в процентах и определяется по формулам S=(nc-nн)/nc (1-2) или S=100%(nc-nн)/nc; (1-2) здесь nc – синхронная скорость вращения поля статора, об/мин; nн – номинальная скорость вращения ротора, об/мин. Материал взят из «Справочника по асинхронным двигателям и пускорегулирующей аппаратуре» Карвовского Г. А. и Оскоркова С.П. Госэнергоиздат, 1962 г.
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.
Статор элетродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Синхронная частота вращения для различного количества полюсов
| Число полюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 12 | 500 | 600 |
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n21. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
,
· где s – скольжение асинхронного электродвигателя,
· n1 – частота вращения магнитного поля статора, об/мин,
· n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.
Двигатели постоянного тока
Резонансная частота: формула
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.