Динамическое (электродинамическое) торможение
Если отключить двигатель от сети переменного тока и подключить его к источнику постоянного тока, то произойдет динамическое торможение. Обмотка статора, при протекании постоянного тока, создаст неподвижное магнитное поле. При вращении в таком поле, в роторе будет наводиться ЭДС, под действием которой будет протекать ток. Этот ток будет взаимодействовать с неподвижным полем статора и создавать тормозной момент, который будет направлен против направления вращения ротора. В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
В двигателе с фазным ротором, величину тормозного момента, а следовательно, скорость торможения, можно изменять, изменяя величину добавочных сопротивлений в цепи ротора.
Рекуперативное (генераторное) торможение
Рекуперативное торможение применяется в основном в качестве подтормаживания перед основным торможением, либо при спуске груза, например в лифтах.
Чтобы наступило рекуперативное торможение, нужно чтобы частота вращения ротора превысила синхронную частоту вращения. В таком случае двигатель начнет отдавать энергию в сеть, то есть станет асинхронным генератором. При этом электромагнитный момент двигателя становится отрицательным, и оказывает тормозной эффект.
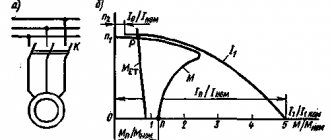
Добиться генераторного торможения можно несколькими способами. Например, в двухскоростных двигателях, при переключении с большей скорости на меньшую. При этом ротор вращается по инерции с частотой, выше, чем новая синхронная частота. Возникнет тормозной момент, который уменьшит скорость до новой номинальной.
Допустим, что в начальный момент времени наш двигатель работал на характеристике 1 в точке A, после переключения скорости на более низкую, он перешел на характеристику 2 в точку B, а затем под действием тормозного момента достиг точки С, с меньшей частотой оборотов.
Генераторное торможение можно осуществить, если уменьшать частоту питания двигателя. Это возможно, если двигатель питается от тиристорного преобразователя частоты. При уменьшении частоты напряжения, уменьшается синхронная частота вращения. Частота вращения ротора, который вращается по инерции, снова окажется выше, возникнет тормозной момент, который будет снижать частоту вращения ротора. Таким образом, двигатель можно довести до полной остановки.
Перевод в режим генератора
Данный способ осуществим только в том случаи, если ротор двигателя вращается со скоростью большей чем магнитное поле статора. Это возможно при изменении количества пар полюсов на большее, чем было до торможения. Стоит отметить, как только скорость ротора станет ниже синхронной, машина автоматически перейдет в режим двигателя. Также не маловажным является тот факт, что при таком способе невозможно полностью остановить вращение ротора двигателя, а лишь притормозить его до определенного значения.
При таком режиме торможения, асинхронная машина не потребляет из сети электрическую энергию, а наоборот вырабатывает и отдает сеть. При переводе асинхронного двигателя в генераторный режим в целях торможения, можно отключить статорные обмотки асинхронной машины и подключить к ним резистор, при этом чем выше сопротивление резистора, тем больше тормозной момент.
Торможение противовключением
Торможение противовключением применяется для быстрой остановки двигателя. Оно может быть осуществлено несколькими способами. В первом способе, в работающем двигателе, меняют две фазы местами, с помощью выключения контактора K1 и включения K2. При этом направление вращения магнитного поля статора меняется на противоположное. Возникает большой тормозной момент, и двигатель быстро останавливается. Но для того чтобы ограничить большие токи в момент увеличения тормозного момента, необходимо вводить в обмотку статора или ротора дополнительное сопротивление.
Во втором способе двигатель используют как тормоз для груза. То есть, если груз спускается вниз, то двигатель должен работать, наоборот, на подъем. Для этого в цепь ротора двигателя вводится большое добавочное сопротивление. Но его пусковой момент оказывается меньше чем момент нагрузки, и двигатель работает при некоторой небольшой скорости, тем самым обеспечивая плавный спуск.
По сути, торможение противовключением осуществляется по схеме реверса двигателя.
Необходимость использования электрических способов торможения в электроприводах грузоподъемных механизмов вызывается спецификой их работы. Торможение позволяет облегчить работу механических тормозов, получить устойчивые постоянные скорости спуска грузов, а также обеспечивает ускоренную остановку приводов.
Для электродвигателей с параллельным возбуждением возможно использование трех тормозных режимов:
а) генераторного с отдачей энергии в сеть;
б) электродинамического;
в) противовключения (противотока).
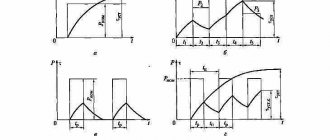
Генераторный режим с отдачей энергии в сеть. Как указывалось, при работе электродвигателя на естественной или искусственной характеристике в двигательном режиме наводимая в обмотке якоря противо э. д. с. всегда меньше приложенного напряжения (Е<U) и ток в обмотке якоря
Этот ток создает вращающий момент электродвигателя М = кФIя, совпадающий с направлением вращения якоря. На холостом ходу электродвигателя, когда момент сопротивления на валу отсутствует, ток в обмотке якоря должен быть равен нулю, т. е. в этом случае противо э. д. с. равна приложенному напряжению:
Таким образом, при изменениях числа оборотов электродвигателя от 0 до n0 противо э. д. с., наводимая в обмотке якоря, всегда меньше приложенного напряжения (или, в крайнем случае, равна ему) и ток в обмотке якоря, согласно выражению (22), положителен, что характерно для двигательного режима работы машины.
Если же под действием внешнего момента, например момента, созданного весом поднятого груза, число оборотов электродвигателя станет больше п0, его противо э. д. с. превысит приложенное напряжение и ток в обмотке якоря, согласно выражению (22), изменит направление, т. е. машина из потребителя электрической энергии превратится в ее источник. Очевидно, что при изменении направления тока меняется и направление момента, создаваемого электродвигателем. Этот момент становится тормозным и уравновешивает внешний момент, приложенный к валу электродвигателя. Это означает, что в уравнениях скоростной и механической характеристик знак минус меняется на плюс
т. е. характеристики генераторного режима являются продолжением характеристик двигательного режима машины и располагаются во II или в IV квадрантах (рис. 16). Нетрудно заметить, что при введении дополнительных сопротивлений в цепь якоря, скорость электродвигателя в генераторном режиме не уменьшается, а, наоборот, увеличивается.
Данный способ электрического торможения весьма выгоден в экономическом отношении, так как он позволяет возвращать в сеть значительную часть электроэнергии, затраченную, например, на подъем груза. Однако он осуществим лишь при повышенных скоростях, намного превышающих номинальную скорость электродвигателя, и поэтому не всегда применим. Торможение с отдачей энергии в сеть не может быть применимо для остановки привода, так как пторм должно быть всегда больше п0. Опытные крановщики чаще всего используют данный способ торможения при погрузке судов, когда высота подъема груза значительно меньше высоты спуска. Осуществляя в данном случае спуск груза в генераторном режиме с отдачей энергии в сеть, можно получить ощутимую экономию электроэнергии и улучшить тем самым экономические показатели.
Режим электродинамического торможения. Несмотря на значительный экономический эффект, торможение с отдачей энергии в сеть применяется сравнительно редко, что объясняется указанными выше недостатками этого способа торможения. Чаще попользуется так называемое электродинамическое торможение, которое может применяться как для ограничения скорости спуска грузов, так и для ускорения остановки привода.
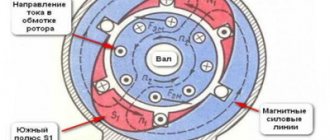
Под режимом динамического торможения понимается режим, возникающий при отключении вращающегося якоря от сети и замыкании его на сопротивление, называемое сопротивлением динамического торможения Rд. схеме, показанной на рис. 17, это осуществляется размыканием контактов Л, которые были замкнуты в двигательном режиме, и замыканием контакта Т. В этом случае уравнения скоростной и механической характеристик примут вид:
Указанные уравнения можно получить из выражений (27) и (32), положив в них U = 0 и заменив R на Rд. Уравнения (46) и (47) показывают, что характеристики электродвигателей параллельного возбуждения в режиме динамического торможения прямолинейны и проходят через начало координат (см. рис. 17). Очевидно, что большим сопротивлениям Rд соответствуют более мягкие характеристики, а при одной и той же скорости — меньшие тормозные моменты и токи.
Рассмотрим особенности динамического режима на примере электропривода механизма подъема. При подъеме груза контакты Л должны быть замкнуты, а контакт Т разомкнут. Допустим, электродвигатель, поднимая груз, работает устойчиво в точке 1 на естественной характеристике а (М = Мс) со скоростью +п1. При размыкании контактов Л и замыкании контакта Т электродвигатель должен перейти на искусственную характеристику b, проходящую через начало координат.
Электродвигатель обладает определенной инерцией, поэтому он, не изменяя скорости вращения, из точки 1 переходит в точку 2 или 2′ на характеристике с в зависимости от величины сопротивления Rд. При этом меняется направление момента и электродвигатель начинает интенсивно тормозиться. При снижении скорости до нуля контакт Т нужно разомкнуть и включить механический тормоз. Если же контакт Т не будет разомкнут, то под действием груза электродвигатель начнет вращаться в обратную сторону, производя спуск груза в режиме динамического торможения.
Устойчивая работа электродвигателя будет в точке 3 или 5, так как при работе в этих точках М = Мс. Таким образом, режим динамического торможения может быть использован не только для остановки, но и для получения определенной установившейся скорости. В рассматриваемом случае при спуске груза вращающий момент, развиваемый электродвигателем, по величине и по знаку такой же, как и при подъеме. Однако направление скорости при переходе через точку О изменилось, поэтому момент, развиваемый электродвигателем при спуске груза, будет тормозным моментом, ограничивающим скорость спуска. Груз будет опускаться с устойчивой скоростью — n3 или n2.
Данный способ торможения отличается простотой, не требует сложных переключений в схеме; он позволяет регулировать время торможения или скорости спуска груза путем регулирования величины сопротивления Rд. Для осуществления торможения данным способом почти не требуется никаких затрат энергии, так как практически процесс торможения заключается в том, что машина работает как генератор с независимым возбуждением, замкнутый на сопротивление Rд. На вал электрической машины передается механическая энергия от затормаживаемого механизма. В машине она преобразуется в электрическую энергию, а последняя — в тепловую в обмотках машины и в сопротивлении Rд.
Главным недостатком рассматриваемого способа следует считать довольно значительное время торможения, так как при малых оборотах значения тормозного момента очень невелики и этот способ нельзя считать целесообразным при необходимости быстрой остановки электропривода.
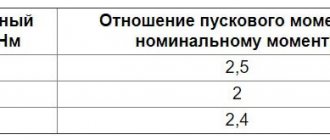
Режим противовключекия. Для осуществления торможения электроприводов подъемно-транспортных машин нередко используется режим противовключения, под которым понимается такой режим, когда электродвигатель, будучи включен в сеть, вращается в сторону, противоположную той, в которой он вращался бы при таком же включении в двигательном режиме. Такой способ торможения может применяться для ограничения скорости спуска грузов и ускорения остановки привода.
Допустим, электродвигатель включен по схеме, показанной на рис. 18, а и, поднимая груз, работает на естественной характеристике а в точке 1 (рис. 18, б) при М = Мc (замкнуты контакты 1В, 2В и П). При размыкании контакта П в цепи электродвигателя окажется включенным дополнительное сопротивление Rт и электродвигатель перейдет на искусственную характеристику b в точке 2 (см. рис. 18, б). Так как момент, развиваемый в точке 2, будет меньше момента сил сопротивления (М<Мc), то скорость электродвигателя начнет быстро снижаться и в точке 3 станет равной 0. Если требуется остановить электродвигатель, то при скорости n = 0 его следует отключить от сети. Если же электродвигатель не будет отключен от сети, то иод действием груза он начнет разгоняться в противоположную сторону. По мере разгона электродвигателя возрастает тормозной момент на его валу и при числе оборотов— n2 (точка 4) он станет равным моменту, создаваемому весом поднятого груза. Работа электродвигателя в точке 4 на характеристике b будет устойчивой и скорость спуска груза будет ограничена величиной —n2. Скорость спуска в данном случае можно регулировать изменением величины дополнительного сопротивления Rт, вводимого в цепь якоря. Чем выше величина этого сопротивления, тем мягче характеристика b и тем выше будет скорость спуска груза.
В рассматриваемом случае при переходе электродвигателя в режим противовключения скорость меняет свой знак, знак же момента (и тока) остается неизменным по сравнению с двигательным режимом. Это и обусловливает эффект торможения. Машина превращается в источник электроэнергии, которая расходуется в сопротивлениях цепи якоря. В этих же сопротивлениях, а также в обмотке возбуждения расходуется та электроэнергия, которая поступает из сети.
В тех случаях, когда направление момента сопротивления на валу электродвигателя определяется направлением его вращения, режим противовключения указанным выше способом получить невозможно. В этом случае для ускорения остановки или быстрого реверса привода необходимо произвести переключение обмотки якоря.
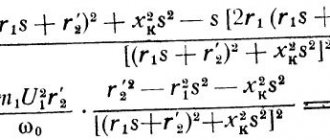
Предположим, что в схеме на рис. 18, а замкнуты контакты 1В, 2В и П и электродвигатель работает устойчиво на естественной характеристике а в точке 1 (рис. 18, в) при М=Мc. Для осуществления быстрого торможения или реверса нужно разомкнуть контакты 1В и 2В и замкнуть контакты 1Н и 2Н. При этом направление тока, а следовательно, и момента изменяется и электродвигатель окажется в тормозном режиме противовключения. Чтобы избежать при этом большого толчка тока и момента, необходимо одновременно с контактами 1В и 2В разомкнуть контакты П, что приводит к введению дополнительного сопротивления. Тогда при замыкании контактов 1Н и 2Н электродвигатель переходит на характеристику b, проходящую через точку — n0. Вначале электродвигатель перейдет на работу, соответствующую точке 2 на характеристике b. Так как момент электродвигателя и статический момент не соответствуют направлению скорости, последняя начинает быстро уменьшаться и в точке 3 станет равной нулю.
Если требуется остановить электродвигатель, то при скорости n = 0 его следует отключить от сети; если же необходимо произвести реверс, то при n = 0 отключают сопротивление Rт, после него начинается обычный пуск электродвигателя в противоположную сторону.
Торможение противовключением является довольно эффективным для механизмов горизонтального передвижения мостов и тележек кранов и механизмов поворота. Оно применяется также для торможения механизмов подъема, особенно при спуске тяжелых грузов. Однако с экономической точки зрения режим противовключения не является выгодным, так как в обмотках машины и дополнительном сопротивлении в тепло превращается не только энергия торможения, но и энергия, подводимая от сети. Дополнительное сопротивление Rт должно быть приблизительно равно полному сопротивлению пускового реостата. Это связано с тем, что в режиме противовключения э. д. с. обмотки якоря совпадает по направлению с приложенным напряжением и для ограничения токов, возникающих при этом режиме, необходимо значительное сопротивление. Это означает, что для снижения тока, возникающего в момент перевода электродвигателя в режим противовключения, до допустимых значений в цепь якоря электродвигателя необходимо включать не только дополнительное сопротивление Rт, но и пусковой реостат. При этом тон в обмотке якоря, согласно выражению (22), будет
где R —сопротивление пускового реостата.
Изменение направления вращения. Изменение направления вращения (реверс) электродвигателя с параллельным возбуждением может быть осуществлено двумя способами: изменением направления тока в обмотке возбуждения или изменением направления тока в обмотке якоря. И в том, и в другом случае изменяется направление вращающего момента, согласно выражению (5), что и обусловливает реверс электродвигателя. На практике обычно используют второй способ, обеспечивающий более быстрое изменение направления вращения. Объясняется это следующим:
а) размыкание цепи возбуждения требует предварительного .размыкания цепи якоря, что связано с усложнением аппаратуры. Размыкание якоря необходимо для предотвращения чрезмерного увеличения тока в нем при уменьшении магнитного потока;
б) обмотка возбуждения электродвигателя параллельного возбуждения обладает значительной индуктивностью и разрыв ее связан с опасностью пробоя изоляции;
в) при изменении направления тока в обмотке возбуждения происходит перемагничивание машины, что увеличивает продолжительность операции и приводит к дополнительным потерям энергии, особенно при частых реверсах.
Практически для осуществления реверса электродвигателя с параллельным возбуждением указанным способом служат контакты 1В, 2В, 1Н и 2Н (см. рис. 18, а). При работе электродвигателя замкнуты попарно либо контакты 1В и 2В, либо 1Н и 2Н. Их переключение приводит, как видно из схемы, к изменению направлении тока в обмотке якоря, а последнее к изменению направления вращения электродвигателя.