Переход двигателя из покоя в рабочее состояние называют пусковым моментом асинхронного электродвигателя. При этом подразумевается, что на обмотки двигателя подано номинальное напряжение стандартной частоты. Этот временной промежуток называют «моментом трогания», «начальным моментом» или «начальный пусковой момент асинхронного двигателя». При этом электродвигатель потребляет максимальное количество электроэнергии. Она расходуется на преодоление тормозного момента вала, потерь в двигателе для придания вращательного момента механизмам. В этой статье мы расскажем читателям сайта Сам Электрик, как рассчитывается пусковой момент электродвигателя и как его можно увеличить.
Расчет пускового момента
Пусковой момент, который зависит от номинального усилия на валу и кратности пускового момента, можно вычислить по формуле:
Мпуск=Мн*Кпуск.,
где:
- Мн — номинальное усилие на валу электродвигателя;
- Кпуск.— кратность пусков, паспортная величина, которая принимает значения от 1,5 до 6.
На практике применяют другую формулу:
Мпуск=9,55*Р2* 1000/F1,
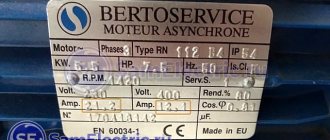
Необходимые данные указываются на шильдике двигателя или в паспорте, где F1 — номинальные обороты.
Р2 равна номинальной мощности в кВт, является расчетной величиной.
Для того, чтобы узнать значение Р2, следует воспользоваться формулой, в которой учитываются пусковой ток, напряжение сети, скольжение. Эти данные можно узнать в паспорте, справочнике или на сайте завода-изготовителя.
Р2=(1,732*U*Iпуск)/S1*1000.
Коэффициенты пусковых токов
В данной таблице приведены примерные значения номинальной и пусковой мощности популярных бытовых приборов и электроинструментов, а так же коэффициенты запаса мощности, которые следует учитывать при расчете мощности электростанции. Эта таблица поможет Вам в расчетах, но не забывайте, что лучше перед покупкой проконсультироваться со специалистом.
Коэффициенты пусковых токов, которые необходимо учитывать при подключении приборов:
| Тип потребителя | Номинальная мощность, Вт | Мощность при пуске, Вт | Требуемый коэффициент запаса мощности |
| Циркулярная пила | 1100 | 1450 | 1,32 |
| Дрель электрическая | 800 | 950 | 1,19 |
| Шлифовальная машинка или станок | 2200 | 2800 | 1,27 |
| Перфоратор | 1300 | 1600 | 1,23 |
| Станок или машинка для финишного шлифования | 300 | 350 | 1,17 |
| Ленточно-шлифовальная машина | 1000 | 1200 | 1,2 |
| Рубанок электрический | 800 | 1000 | 1,25 |
| Пылесос | 1400 | 1700 | 1,21 |
| Подвальный вакуумный насос | 800 | 1000 | 1,25 |
| Бетономешалка | 1000 | 3500 | 3,5 |
| Буровой пресс | 750 | 2600 | 3,47 |
| Инвертор | 500 | 1000 | 2 |
| Шпалерные ножницы | 600 | 720 | 1,2 |
| Кромкообрезной станок | 500 | 600 | 1,2 |
| Холодильник | 600 | 2000 | 3,33 |
| Фризер | 1000 | 3500 | 3,5 |
| Кипятильник, котел (Бойлер) | 500 | 1700 | 3,4 |
| Кондиционер | 1000 | 3500 | 3,5 |
| Стиральная машина | 1000 | 3500 | 3,5 |
| Обогреватель радиаторного типа | 1000 | 1200 | 1,2 |
| Лампа накаливания для освещения | 500 | 500 | 1 |
| Неоновая подсветка | 500 | 1000 | 2 |
| Электроплита | 6000 | 6000 | 1 |
| Электропечь | 1500 | 1500 | 1 |
| Микроволновая печь | 800 | 1600 | 2 |
| Hi-Fi TV – бытовая техника | 500 | 500 | 1 |
| Электромясорубка | 1000 | до 7000 (см. инструкцию) | 7 |
| Погружной водяной насос | 1000 | 3500 | 3,5 |
Методы увеличения Мпуск
Из формулы видно, от чего зависит пусковой момент асинхронного двигателя и как увеличить его, изменяя параметры. Он зависит от мощности трехфазного двигателя и величины скольжения.
Мощность определяется по формуле, корень из 3 умноженный на напряжение и ток. Скольжение изменяет свое значение в зависимости от оборотов вала механизма. При оборотах двигателя равных нулю, скольжение принимает значение равное 1.
При разгоне электродвигателя оно уменьшается и стремится к нулю при достижении номинальных оборотов ротора. Для того чтобы увеличить пусковой момент, достаточно увеличить пусковой ток или питающее напряжение. Величину скольжения изменить нельзя.
Для примера приведем расчет пускового момента, используя паспортные данные некоторых двигателей. Результат сведен в нижеприведенную таблицу:
При этом следует помнить, что использование электродвигателя в механизмах с пусковым моментом, превышающим усилие двигателя на валу – недопустимо. В этом случае электродвигатель не сможет преодолеть потери в двигателе и тормозной момент механизма. Он просто выйдет из строя. Т.е. усилие электродвигателя недостаточно для нормальной работы устройства.
Как улучшить крутящий момент и обороты двигателя постоянного тока?
Я собираюсь предположить, что у этого 6-летнего есть хотя бы небольшой опыт в физике. Я собираюсь начать с ответа на вопрос, почему каждый результат будет происходить с большим количеством математики, чтобы описать физику, стоящую за всем этим. Тогда я отвечу на каждый случай индивидуально с математикой, обеспечивающей обоснование каждого результата. Я подведу итоги, ответив на ваш «общий» вопрос.
Крутящий момент двигателя определяется по уравнению:
τзнак равноKt⋅ я (N⋅ м ) τ = К T ⋅ я ( N ⋅ м )
K t = постоянная крутящего моментаτ= крутящий момент τ знак равно крутящий момент КT= постоянная крутящего момента К T знак равно постоянная крутящего момента я= ток двигателя я знак равно ток двигателя
КT=2⋅B⋅N⋅l⋅r (N⋅m/A) K t = 2 ⋅ B ⋅ N ⋅ l ⋅ r ( N ⋅ m / A )
N = количество петель провода в магнитном поле l = длина магнитного поля, действующего на провод r = радиус якоря двигателяB=strength of magnetic field in Teslas B = strength of magnetic field in Teslas N=number of loops of wire in the magnetic field N = number of loops of wire in the magnetic field l=length of magnetic field acting on wire l = length of magnetic field acting on wire r=radius of motor armature r = радиус якоря двигателя
Напряжение противо-ЭДС определяется:
В= Ке⋅ ω ( v o l t s ) В знак равно К е ⋅ ω ( v о L T s )
K e = постоянная напряжения ω = угловая скоростьВ= Напряжение обратной ЭДС В знак равно Напряжение обратной ЭДС Ке= постоянная напряжения К е знак равно постоянная напряжения ω = угловая скорость ω знак равно угловая скорость
Угловая скорость — это скорость двигателя в радианах в секунду (рад / с), которая может быть преобразована из об / мин:
рад / сек = об / мин × π30 рад / сек знак равно RPM × π 30
— второй основной параметр двигателя. Как ни странно, K e рассчитывается по той же формуле, что и K t, но дается в разных единицах:Ке К е Ке К е КT К T
Ке= 2 ⋅ B ⋅ N⋅ l ⋅ r ( v o l t s / r a d / sec) К е знак равно 2 ⋅ В ⋅ N ⋅ L ⋅ р ( v о L T s / р a d / s е с )
V ⋅ I = τ ⋅ ωпя н= Pо у т п я N знак равно п о U T В⋅ я= τ⋅ ω В ⋅ я знак равно τ ⋅ ω
Подставляя уравнения сверху, получаем:
K e = K t( Ке⋅ ω ) ⋅ я= ( КT⋅ я) ⋅ ω ( К е ⋅ ω ) ⋅ я знак равно ( К T ⋅ я ) ⋅ ω Ке= КT К е знак равно К T
Я собираюсь предположить, что каждый параметр изменяется отдельно.
ω = VКе ω знак равно В К е
Таким образом, с увеличением магнитного поля скорость будет уменьшаться. Это опять-таки имеет смысл, поскольку чем сильнее магнитное поле, тем сильнее «толчок» якоря, чтобы он не поддавался изменению скорости.
Поскольку выходная мощность равна угловой скорости, умноженной на угловую скорость, а выходная мощность равна выходной мощности (опять же, при условии эффективности 100%), мы получаем:
пя н= τ⋅ ω п я N знак равно τ ⋅ ω
Таким образом, любое изменение крутящего момента или скорости будет прямо пропорционально мощности, необходимой для привода двигателя.
Случай 2: (Здесь немного больше математики, которую я явно не упоминал выше) Возвращаясь к закону Лоренца, мы видим, что:
τ= 2 ⋅ F⋅ r = 2 ( я⋅ B ⋅ N⋅ л ) г τ знак равно 2 ⋅ F ⋅ р знак равно 2 ( я ⋅ В ⋅ N ⋅ L ) р
F= Я⋅ B ⋅ N⋅ л F знак равно я ⋅ В ⋅ N ⋅ L
Благодаря Ньютону мы имеем:
Fзнак равно м ⋅ г F знак равно м ⋅ г
τ= 2 ⋅ м ⋅ г⋅ г τ знак равно 2 ⋅ м ⋅ г ⋅ р
Если вы сохраните длину провода на одном уровне, но увеличите его диаметр, масса увеличится. Как можно видеть выше, масса прямо пропорциональна крутящему моменту, так же как и напряженность магнитного поля, поэтому применяется тот же результат.
Схемы включения асинхронного двигателя
Для уменьшения воздействия пусковых токов применяются различные схемы включения. Это зависит от механизма и мощности электродвигателя.
Типовое включение двигателя осуществляется напрямую. Напряжение на обмотки подается через магнитный пускатель.
Во время пуска в сети возникает бросок тока, который превышает номинальный в 5-7 раз. Длительность зависит от мощности электродвигателя и нагрузки на валу. Чем мощнее устройство, тем длительнее период разгона.
В результате возникает понижение напряжения в сети, что отрицательно сказывается на аппаратуре, подключенной к этой цепи. Маломощные не оказывают существенного влияния на сети.
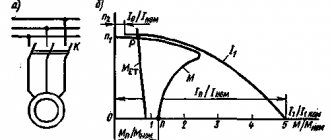
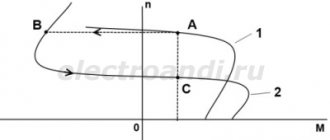
На графике снизу представлена зависимость тока от времени разгона электродвигателя:
При запуске мощного электропривода 10 и более кВт следует ограничивать пусковой ток. Это необходимо, чтобы сети не испытывали значительные перегрузки, в результате, которой происходит понижение напряжения сети, что приводит к нештатной ситуации.
Для этого применяются схемы переключения с треугольника на звезду, используются токоограничивающие устройства или частотные преобразователи.
Большая Энциклопедия Нефти и Газа
Увеличение пускового момента связано с влиянием в области больших скольжений момента вихревых токов. [1]
Для увеличения пускового момента в таких случаях параллельно рабочему конденсатору включают еще один пусковой конденсатор, условно изображенный на рис. 18.10 пунктиром. Это приводит к снижению напряжения на рабочем конденсаторе и к соответствующему повышению напряжения на зажимах рабочей фазы, соединенной последовательно с конденсатором; средняя величина потока полюса эллиптического вращающегося поля возрастает и пусковой момент двигателя увеличивается. [5]
Для увеличения пусковых моментов применяют двигатели с двойной роторной обмоткой, допускающие, как правило, пуск в режиме противотока. Выбор мощности электродвигателей собственных нужд производят по условиям длительного режима работы, проверяя, чтобы их пусковой момент был больше момента сопротивления механизма. При выборе мощности двигателя учитывается продолжительность его пуска, которая е должна превышать допустимую. [6]
Для увеличения пусковых моментов двигателей прямоугольные пазы делают узкими и глубокими, так как эффект вытеснения тока в них возрастает с увеличением высоты стержня. Роторы с такими пазами называют глубокопазными. [7]
Для увеличения пускового момента двигателя и уменьшения перенапряжения на обмотке возбуждения она обычно шунтируется разрядным сопротивлением. Для исключения дополнительных потерь энергии разрядное сопротивление после окончания пуска отключается. [9]
Для увеличения пускового момента рассматриваемого двигателя путем приближения его вращающегося поля к круговому применяют различные способы: устанавливают между полюсными наконечниками смежных полюсов магнитные шунты, которые усиливают магнитную связь между основной обмоткой и короткозамкнутым витком и улучшают форму магнитного поля в воздушном зазоре; увеличивают воздушный зазор под наконечником, не охватываемым короткозамкнутым витком; используют два и большее количество короткозамкнутых витков на одном наконечнике с разными углами охвата. Имеются также двигатели без короткозамкнутых витков на полюсах, но с несимметричной магнитной системой: различной конфигурацией отдельных частей полюса и разными по величине воздушными зазорами. [11]
Для увеличения пускового момента рассматриваемого двигателя путем приближения его вращающегося поля к круговому применяют различные способы: устанавливают между полюсными наконечниками смежных полюсов магнитные шунты, усиливающие магнитную связь между основной обмоткой и короткозамкнутым витком и улучшающие форму магнитного поля в воздушном зазоре; увеличивают воздушный зазор под наконечником, не охватываемым короткозамкнутым витком; используют два и большее количество короткозамкнутых витков на одном наконечнике с разными углами охвата. Имеются также двигатели без короткозамкнутых витков на пслюсах, но с несимметричной магнитной системой: различной конфигурацией отдельных частей полюса и разными по величине воздушными зазорами. Такие двигатели имеют меньший пусковой момент, чем двигатели с экранированными полюсами, но КПД их выше, так как у них потери мощности в короткозамкнутых витках отсутствуют. [12]
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Читать также: Размеры самодельного плуга для мотоблока
Есть две возможности контролирования числа оборотов:
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
Для устранения этих неисправностей требуется перемотка двигателя.
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!