Электропривод
Электрический привод (сокращённо — Электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
И настоящее время электропривод является основным видом привода стационарных машин и механизмов, а во многих случаях и гидромелиоративных, транспортных, сельскохозяйственных и других подвижных хинин.
Достоинства электрического привода:
I) мощность электродвигателя для привода рабочей машины может быть подобрана достаточно близкой к требуемой;
2) электрический двигатель в пожарном отношении менее опасен, чем, например, тепловой двигатель внутреннего сгорания;
3) электропривод позволяет быстро, а если нужно, то и часто, пускать и останавливать машину, плавно тормозить ее;
4) при изменении нагрузки на валу электродвигатель не требует специальных регуляторов подачи электроэнергии из сети. Увеличение подводимой к двигателю электроэнергии происходит автоматически с ростом нагрузки;
5) электропривод позволяет подобрать такой тип электродвигателя, механическая характеристика которого лучше, чем других двигателей, подходит к характеристике рабочей машины;
6) при электроприводе (воздействуя на электродвигатель, преобразователь или передачу) можно ступенчато или плавно регулировать частоту вращения рабочей машины в необходимых диапазонах;
7) электрический двигатель способен преодолевать длительные и значительные перегрузки, создаваемые рабочей машиной;
 электрический привод позволяет получить наибольшую быстроходность и наивысшую производительность рабочей машины;
электрический привод позволяет получить наибольшую быстроходность и наивысшую производительность рабочей машины;
электрический двигатель позволяет экономить электроэнергию, а в отдельных случаях, при рекуперативном торможении, отдавать ее в электрическую сеть (при этом механическая энергия преобразуется в электрическую)
10) при электроприводе можно проще и полнее автоматизировать машины и установки;
11) электродвигатель имеет более высокий к.п.д. по сравнению с другими типами двигателей;
12) электродвигатели выпускают с высокой степенью уравновешенности, что позволяет встраивать их в рабочие машины, облегчать фундамент, а иногда и полностью отказываться от фундамента.
Современный электропривод, как правило, автоматизирован. Автоматическая система управления электроприводом позволяет наиболее рационально построить технологический процесс, повысить производительность труда, улучшить качество продукции и снизить ее себестоимость. В настоящее время промышленность изготавливает экскаваторы, механизмы непрерывного транспорта, подъемники и другие строительные машины и оборудование, оснащенные электродвигателями, электроаппаратурой, электрическим освещением и в значительной степени автоматизированные. Техникам-механикам необходимо хорошо знать электротехнику, свойства и схему электродвигателей, аппаратов и приборов, основы электропривода, схемы управления электроприводом и его автоматизации, а также электрооборудование гидромелиоративных машин.
Онлайн журнал электрика
Систематизация электроприводов обычно делается по виду движения и маневренности, роду электронного и механического передаточных устройств, методу передачи механической энергии исполнительным органам.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, также электроприводы возвратно-поступательного движения.
По принципу регулирования скорости и положения исполнительного органа электропривод может быть:
- нерегулируемый и регулируемый по скорости;
- следящий (при помощи электропривода воспроизводится перемещение исполнительного органа в согласовании с произвольно изменяющимся задающим сигналом);
- программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в согласовании с данной программкой);
- адаптивный (электропривод автоматом обеспечивает лучший режим движения исполнительного органа при изменении критерий его работы);
- позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины).
По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в каком электродвигатель конкретно соединен с исполнительным органом.
По роду электронного преобразовательного устройства различают:
- вентильный электропривод, преобразовательным устройством в каком является тиристорный либо транзисторный преобразователь электроэнергии;
- система управляемый выпрямитель-двигатель (УВ-Д) – вентильный электропривод неизменного тока, преобразовательным устройством которого является регулируемый выпрямитель напряжения;
- система преобразователь частоты – движок (ПЧ-Д) – вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты;
- система генератор-двигатель (Г-Д) и магнитный усилитель-двигатель (МУ-Д) – регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат либо магнитный усилитель.
По методу передачи механической энергии исполнительному органу электроприводы делятся на групповые, личные и взаимосвязанные.
Групповой электропривод характеризуется тем, что от 1-го мотора приводится в движение через коробку несколько исполнительных органов одной либо нескольких рабочих машин.
Кинематическая цепь в таком приводе сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие этого трансмиссионный электропривод в текущее время практически не применяется, он уступил место персональному и взаимосвязанному.
Личный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным движком. Этот вид привода в текущее время является главным, потому что при личном электроприводе упрощается кинематическая передача (в неких случаях она стопроцентно исключена) от мотора к исполнительному органу, просто осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины.
Личный электропривод обширно применяется в разных современных машинах, к примеру: в сложных металлорежущих станках, прокатных станах металлургического производства, подъемно-транспортных машинах, роботах-манипуляторах и т.п.
Взаимосвязанный электропривод содержит два либо несколько электрически либо механически связанных меж собой личных электроприводов, при работе которых поддерживается данное соотношение либо равенство скоростей, либо нагрузок, либо положение исполнительных органов рабочих машин.
Необходимость в таком приводе появляется по конструктивным либо технологическим суждениям. Примером многодвигательного взаимосвязанного электропривода с механическим валом может служить привод длинноватого ленточного либо цепного сборочного потока, привод платформы механизма поворота массивного экскаватора, привод общей шестерни массивного винтообразного пресса.
В этом случае, когда во взаимосвязанном электроприводе появляется необходимость всепостоянства соотношения скоростей рабочих органов, не имеющих механических связей, либо когда воплощение механических связей затруднено, употребляется особая схема электронной связи 2-ух либо нескольких электродвигателей, именуемая схемой электронного вала.
Примером такового привода может служить привод сложного металлообрабатывающего станка, электропривод шлюзов и разводных мостов и т.д. Взаимосвязанный электропривод обширно применяется в бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д.
По уровню автоматизации электроприводы можно поделить на неавтоматизированные, автоматические и автоматические. Два последних типа электроприводов находят применение в подавляющем большинстве случаев.
Мирошник А. И., Лысенко О. А.
Школа для электрика
Электропривод сборочного потока
Рекомендации по выбору вида, типа и мощности двигателя электропривода
При работе электропривода с длительной постоянной нагрузкой задача выбора электродвигателя (постоянного тока, асинхронного, синхронного) относительно проста.
Для электропривода, не требующего регулирования скорости в больших диапазонах ее изменения, рекомендуется применять синхронные двигатели. Эта рекомендация объясняется тем, что современный синхронный двигатель пускается в ход также быстро как и асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двджигателя той же мощности (у синхронного двигателя выше коэффициент мощности cosφ и больше максимальный момент Mmax на валу).
При этом у асинхронных двигателей последнего поколения можно достаточно эффективно регулировать скорость вращения, осуществлять реверс с необходимым моментом для работы электропривода, но для этого применяются специальные устройства управления.
Но если электродвигатель привода должен работать в условиях регулируемой частоты вращения, реверса, частых пусков, больших изменений нагрузки, то при выборе вида двигателя необходимо сопоставить условия работы электропривода с особенностями механических характеристик различных видов электродвигателей.
В электротехнике принято различать естественную и искусственную механические характеристики двигателя. Естественная характеристика соответствует номинальным (рабочим) условиям его включения, нормальной схеме соединений и отсутствию каких-либо добавочных элементов в цепях двигателя и соединении этих цепей по специальным схемам.
Важным критерием для оценки механических характеристик электродвигателя служит их жесткость:
где: ΔM — изменение момента на валу двигателя;
Δn — изменение скорости вращения ротора двигателя.
В зависимости от значения жесткости принято делить механические характеристики на абсолютно жесткие, Δn = 0,λ = ∞ (синхронные двигатели), жесткие, у которых изменение частоты вращения мало λ = 40 ÷ 10 (линейная часть характеристики асинхронного двигателя, характеристика двигателя постоянного тока с параллельным возбуждением), мягкиес большим изменением частоты вращения, у которых λ ≤ 10 (характеристика двигателя постоянного тока с последовательным возбуждением, искусственная характеристика асинхронного двигателя с фазным ротором, искусственная характеристика двигателя постоянного тока с параллельным возбуждением).
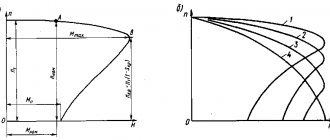
На рис. 1 представлены естественные механические характеристики различных видов двигателей.
Требования к жесткости механической характеристики в ряде случаев являются основанием для выбора вида двигателя.
При частых пусках и непостоянной нагрузке наиболее надежным, экономичным и простым в эксплуатации является асинхронный двигатель с короткозамкнутым ротором. При больших мощностях, если невозможно применить коротко-замкнутый асинхронный двигатель, устанавливается асинхронный двигатель с фазным ротором.
Двигатель постоянного тока сложнее по конструкции (из-за наличия коллекторно-щеточного узла), стоит дороже, требует более тщательного ухода в эксплуатации и изнашивается быстрее, чем двигатель переменного тока. Однако, в ряде случае предпочтение отдается двигателю постоянного тока, позволяющему простыми средствами изменить частоту вращения электропривода в широких пределах.
Тип двигателя (его конструкцию) выбирают в зависимости от условий окружающей среды. Приходится учитывать необходимость защиты среды от возможных искрообразований в двигателе (при наличие взрывоопасной атмосферы), а также самих двигателей от попадания в них влаги, пыли, химических веществ из окружающей среды.
Во многих случаях в приводах необходимо регулировать скорость вращения ротора двигателя.
Для регулирования частоты вращения двигателя существует два надежных, но существенно несовершенных метода:
- включение резисторов в цепи якорных обмоток ротора;
- переключение числа пар полюсов обмотки статора.
Первый метод рационален лишь при узких пределах регулирования при постоянстве момента на валу двигателя, а второй обеспечивает лишь дискретное (ступенчатое) регулирование и практически применяется в основном для маломощных приводов.
В настоящее время благодаря появлению мощных полупроводниковых приборов положение в этой области существенно изменилось. Современные электронные преобразователи дают возможность изменять в широком диапазоне частоту переменного тока, что позволяет плавно регулировать скорость вращающегося магнитного поля, а следовательно эффективно регулировать частоту вращения асинхронного и синхронного двигателей.
Оптимальный выбор мощности электродвигателя для привода должен удовлетворять следующим требованиям:
- надежность в работе;
- возможность работоспособного состояния в различных условиях;
- экономичность в эксплуатации.
Установка двигателя большей мощности, чем это необходимо по условиям работы привода, вызывает излишние потери энергии при работе электрической машины, обуславливает дополнительные капитальные вложения, увеличение массы и габаритов двигателя.
Установка электродвигателя меньшей мощности снижает производительность электропривода и делает его работу ненадежной. При этом сам электродвигатель в подобных условиях может быть поврежден.
Электродвигатель необходимо выбирать так, чтобы его мощность использовалась возможно полнее. Во время работы двигатель не должен нагреваться до предельно допустимой температуры, в крайнем случае на очень непродолжительное время. Кроме того, двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент на валу тот, который требуется для нормального функционирования исполнительного механизма.
В соответствии с этим мощность двигателя выбирается в большинстве случаев на основании условий нагревания до предельно допустимой температуры. Производится так называемый выбор мощности по нагреву. Затем осуществляется проверка соответствия перегрузочной способности двигателя условиям пуска машины и временным перегрузкам. Иногда, при большой кратковременной перегрузке, приходится выбирать двигатель, исходя из требуемой максимальной мощности. В подобных условиях максимальная мощность двигателя длительное время, как правило, не используется.
Выбор мощности для привода с продолжительным режимом работы при постоянной или незначительно меняющейся нагрузке на валу является простым. В этом случае мощность двигателя должна быть равна мощности нагрузки, а проверки на перегрев и перегрузку во время работы электропривода не нужны (это объясняется изначально определенными условиями работы электродвигателя). В тоже время необходимо проверить, достаточен ли пусковой момент на валу двигателя для пусковых условий данной электрической машины.
Мощность продолжительной нагрузки определяется на основании проверенных практикой теоретических расчетов.
Рассмотрим конкретный пример. Например, мощность двигателя для вентилятора (и не только его, а любого двигателя) можно определить, как
где: V — количество нагнетаемого воздуха, м3/с2;
Δр — перепад давления, Па;
ηвен — коэффициент полезного действия (КПД) вентилятора (у крыльчатых вентиляторов он равен 0,2 ÷ 0,35);
ηпер — КПД передачи от двигателя к крыльчатке вентилятора.
В приведенной формуле произведение VΔр рпредставляет собой полезную мощность вентилятора, а 1000 — коэффициент для перевода мощности в киловатты.
В инженерных расчетах для определения мощности электродвигателя привода при продолжительной его работе используют электрические (полученные экспериментальным путем) формулы, проверенные длительной практикой.
При кратковременном, повторно-кратковременном и продолжительном с переменной нагрузкой режимах работы электропривода важно знать закон изменения во времени превышения температуры двигателя над температурой окружающей среды.
Электрическая машина с точки зрения нагревания представляет собой весьма сложное тело. Тем не менее при инженерных расчетах, не требующих большой точности, можно считать электрическую машину однородным телом.
Это дает возможность применить к ней упрощенное уравнение нагревания:
где: С — теплоемкость электрической машины;
Н — теплоотдача машины;
Q0 — теплота, выделяемая в машине в единицу времени.
Рассмотрим два крайних случая: t = ∞ и t = 0. При t = ∞ получим: Qodt = HVmaxdt. (4)
Решая это уравнение методом разделения переменных, получаем
где — постоянная времени нагрева машины, определяемая экспериментально.
При t = 0 начальное превышение температуры будет V = V0, на основании чего постоянная A = Vmax — V0, а закон нарастания превышения температуры машины будет иметь вид
Таким образом превышение температуры машины V над температурой окружающей среды возрастает по показательному закону, стремясь к значению Vmax. Значение начального превышения температуры V0 лишь изменяет скорость нарастания температуры, не изменяя характера процесса (рис. 2).
При различных значениях продолжительной нагрузки одной и той же машины в диапазоне мощностей электродвигателя (Р1, Р2, … Рном, … Рк, … Рn) графики V(t) будут отличаться лишь ординатами (рис. 3).
Наибольшее допустимое для данной машины превышение температуры равно Vном. Прямая, параллельная оси абсцисс Vном пересекает в различных точках кривых V(t), соответствующие различным значениям нагрузки электродвигателя.
Абсцисса точки пересечения определяет тот промежуток времени tk, в течение которого мощность двигателя может быть временно равна мощности Рк, представляющей собой перегрузку по отношению к его номинальной мощности в продолжительном режиме работы. Кривая нагревания, асимптотически приближающаяся к Vном через промежуток времени tn, соответствует номинальной мощности электродвигателя Рном. При нагрузках, меньших Рном, мощность двигателя используется не полностью. Однако, если двигатель загружается до номинальной мощности только на относительно короткое время, то по сути он тоже используется не на полную мощность. Целесообразно его кратковременно перегрузить, и чем меньше продолжительность работы, тем больше должна быть эта перегрузка. Предел повышения нагрузки двигателя по мере уменьшения продолжительности включения определяется мгновенной перегрузочной мощностью двигателя, зависящей от его электромагнитных, механических и коммутационных свойств (максимального момента мощности на валу у асинхронного двигателя, условий коммутации щеточно-коллекторного узла у машин постоянного тока и т.п.).
При повторно-кратковременном режиме электродвигатель попеременно то нагревается, то охлаждается. Изменение его температуры в течение времени каждого цикла «включение — выключение» зависит при этом от предыдущего теплового состояния.
График зависимости нагревания и охлаждения машины от времени в подобных условиях показан на рис. 4.
Конечное превышение температуры каждой данной части цикла является начальным превышением температуры для последующей части цикла. Если во время той или иной части цикла наступает заметное изменение условий охлаждения электрической машины (остановка двигателя или существенное изменение частоты вращения ротора), то это изменяет значение постоянной времени нагрева машины τ, что должно быть учтено при построении графиков.
Рассмотренные методы определения мощности электродвигателя по температурным условиям посредством построения графиков нагревания требуют значительной затраты времени и трудоемких аналитических расчетов. В то же время графический метод сам по себе содержит систематические ошибки и в конце концов не дает точных результатов. Графические методы приведены выше лишь для того, чтобы наглядно показать картину изменения нагрева двигателя при переменной нагрузке.
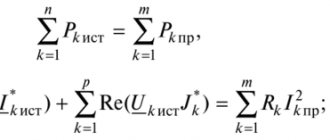
В большинстве случаев для такого выбора мощности электродвигателя применяется более простые, так называемые инженерные расчеты, в частности эквивалентного тока. В основу метода эквивалентного тока положено допущение, что при переменной нагрузке двигателя его средние потери должны быть равны потерям при продолжительной (номинальной) нагрузке.
Как известно из теории электрических машин, мощность потерь двигателя складывается из постоянных Рпост и переменных Рпер мощностей. Мощность постоянных потерь равна сумме мощности потерь на трение, в магнитопроводе (у асинхронных двигателей и двигателей постоянного тока с параллельным возбуждением), на возбуждение у синхронных двигателей и двигателей с параллельным возбуждением. Мощность переменных потерь можно считать пропорциональной квадрату рабочего тока I двигателя и сопротивлению соответствующей обмотки r, причем приближенно можно считать последнее постоянным. Если ток изменяется за соответствующие промежутки времени, то за все рабочее время Σt=T суммарные потери энергии в двигателе будут равны
При переменной нагрузке эквивалентным током Iэк, за то же время работы электродвигателя Т потери энергии в двигателе вычисляются по более простой формуле:
Зная эквивалентный ток, номинальное напряжение и номинальный коэффициент мощности, можно определить номинальную мощность двигателя:
Метод эквивалентного тока можно применять лишь при условии постоянства мощности потерь в магнитопроводе и на трение, а также сопротивлений обмоток в течение всего рабочего времени Т.
В ряде случаев условия нагрузки определяют непосредственный момент, требуемый от двигателя, а не ток. Тогда можно пользоваться методом эквивалентного момента: у всех электродвигателей вращающий момент на валу пропорционален произведению тока и магнитного потока. У двигателей переменного тока (синхронных и асинхронных) можно приближенно считать постоянным коэффициент мощности cosφ.
При таких упрощениях можно считать вращающий момент
где Квр — постоянная величина, откуда из вышеприведенного выражения для эквивалентного тока Iэк можно получить:
Далее по эквивалентному моменту и номинальной угловой скорости двигателя ωном рассчитывается номинальная мощность двигателя электропривода:
Для повышения надежности работы электропривода рекомендуется проверить, достаточен ли максимальный момент Мmах двигателя для того, чтобы удовлетворить требованиям кратковременных возможных перегрузок данного привода; иными словами должно быть выполнено следующее условие: коэффициент перегрузки двигателя λном должен быть по абсолютной величине больше отношения максимального момента Мmах нагрузки к номинальному моменту двигателя, то есть
На этом выбор типа, вида и мощности двигателя может быть закончен.
М. С. ИВАНОВ, В. Н. ДРАЧКОВ, Санкт-ПетербургскийГосударственныйУниверситет ГражданскойАвиации (СПбГУГА).
Литература
- А. С. Касаткин, М. В. Немцов. Электротехника: уч. пособие для Вузов. — 5-е издание, переработанное. — М.: Энергия, 2003 г.
- В. Ю. Ломоносов и др. Электротехника. М.: Энергоатомиздат, 1990 г.
- Г. Г. Кудрявцев и др. Микропроцессоры в системах технического обслуживания средств связи и управления — М.: Радио и связь, 1999 г.
- В. Н. Драчков, В. В. Панферов. Электротехника и электроника. Ч.1 Электротехника. Учебное пособие. Академия ГА, 2006 г.
- В. Н. Драчков, В. В. Панферов. Электротехника и электроника. Ч. 2 Электротехника. Учебное пособие. Академия ГА, 2004 г.