Какие бывают устройства управления
Устройства управления электродвигателями необходимы для создания вашего робота. Теперь выбрана конструкция робота, исполнительные механизмы или моторы и контроллер для робота. Наконец пришло время заставить все двигаться. Первый вопрос, который многие новички задают при создании своего первого робота, — «как я могу управлять моторами?».
Для этого служат такие устройства управления электродвигателями, как контроллер двигателя. После небольшого исследования выражения «контроллер двигателя» появилось много вопросов. Что такое контроллер двигателя и зачем он мне нужен?
Управление векторным асинхронным двигателем, применение и способы
Для понимания что такое «векторное» управление — реакция ворочающего устройства с так величаемым «пространственным» вектором, что вертится с частотой сферы двигателя. И чтобы лучше понимать все его функции желательно пересмотреть статью и найти нужную информацию.
Асинхронный движок — двигатель переменчивого течения, где энергетика в намотках статора творят вертящееся поле магнитов. Такое поле индуктирует потоки в намотке ротора, воздействует на работающие токи, притягивая в работу ротор.
Впрочем, дабы в работающем роторе, ворочающееся магнитная сфера статора, индуктировала токи, ротор в аппаратном кружении принужден чуть-чуть опаздывать от кружений статора. Следовательно, в несинхронном моторе быстрота циркуляции ротора постоянно примерно такая как в стремительности верчения магнитного поля (что обусловливается импульсами неустойчивого тока, из-за чего и питается движок). Когда отход ротора от движущегося магнитного поля статора будет больше (скатывание) следовательно создастся сильная нагрузка на моторчик.
Недостаток синхронности промеж кручением ротора и магнитов в статоре нормальная черта для нестабильного моторчика, от чего и походит его название. Ворочающееся магниты в статоре образовывается с использованием обвивок, питаемых потоками, сомкнутыми по фазе.
Естественно ради данной миссии приспосабливается 3х фазный неустойчивый ток. Существует вдобавок одно фазные асинхронные моторчики, в каких прогресс фаз посреди токов в обвивках формируется подключением всевозможных жвавых противодействий в обмотке. Осуществить качественную настройку угловой стремительности вращения ротора, и еще вращающего фактора на валу нынешних бесщёточным моторов, употребляют или векторное, или скалярное регулирование электронным приводом.
Векторное управление-способ управления бесщеточными моторами неустойчивого тока, какой разрешает самостоятельно и в принципе безынерционной координировать быстроту верчения и момент на валу электродвигателя.
Ключевая мысль векториального движения охватывается в том, дабы проверять не лишь величину и импульс усилия питания, но также и фазу. Иными словами испытывается значение и угол пластического вектора.
Превосходства векторного управления:
- высочайшая достоверность регулирования быстроты;
- гладкий момент начала движения и плавное обращение мотора во всем спектре частот;
- скорая подавленность на замене нагрузки: при изменении перегрузки абсолютно не случается изменения скорости;
- усиленный спектр управления и пунктуальность регулирования;
- снижаются утечки на нагревании и намагничивание, увеличивается КПД электродвигателя.
К минусам векториального управления можно отнести:
- потребность настраивать параметры электродвигателя;
- огромные качания стремительности при долговременной нагрузке;
- высокая вычислительная сложность.
Пользуются такими методами регулировки асинхронным двигателем: ·
- реостатный — модифицирование трансляции верчения асинхронного мотора с фазным ротором способом замены противодействия реостата в цепях ротора, также вдобавок это делает отправной момент больше и увеличивает решающее скольжение; ·
- частотный — переворот импульсов циркуляции асинхронного мотора путем смены проводимость потока в питающем напряжении, из-за чего это способствует модифицированию повторяемости верчении поля статора. Используется введение мотора сквозь проводимый реформатор;
- переподключение обвивок с помощью схемы «звезда» на «треугольник» в течении запуска двигателя, что создает уменьшение отправных токов в обмотках в три раза, но также оно содействует уменьшению момента; ·
- пульсирующей подачей — усилие питания специфического варианта (например, пилообразного); · установление вспомогательной ЭДС гармонично либо противоположно направлено с частотой скольжения во вторичную цепь; ·
- изменением количества полюсов, ежели подобное перекидывание предвидено разумно (только на короткозамкнутых роторах);
- замена амплитуды снабжающего напряжения, если модифицируется исключительно амплитуда (или воздействующее значение) закручивающегося потока. Дальше вектора напряжений управления и возбуждения остаются перпендикулярны (автотрансформаторный пуск); ·
- фазисное руководство свойственно тем, что переворот импульсы верчения ротора создается способом изменения продвижения фаз между векторами усилий возбужденности и управления. ·
- амплитудно-фазовый прием охватывает два описанных способа; ·
- вложение в аппарат питания статора реакторов; ·
- индуктивное противодействие на моторе с фазным ротором.
Схема электрическая
Фундаментом схемы представляются очертания контроля магнитного потокового сцепления и обстоятельства совместно с блоком оценки, что возможно будет задействован многообразными способами. Это значит, что наружный контур руководства быстротой в значительном уровня унифицирован и генерирует заворачивающие сигналы для настраивания фактора М* и магнитного потокосцепления * (через источник управления потоком). Быстрота мотора имеет возможность измерения с помощью измерителя (скорости / положения) либо свойственно делать через оценку, позволяющего создавать бездатчиковое управление.
Классифицирование технологий векториального управления
Здесь рассматриваются исключительно самые знаменитые технологии управления. Обговариваемые способы контроля фактора презентованы для систем управления асинхронными движками и синхронными моторами с долговременными магнитами с синусоидальной возвратной ЭДС.
Чаще всего способы регулировки моментом распределяют на такие виды:
- Линейные (ПИ, ПИД) регуляторы;
- Нелинейные (гистерезисные) регуляторы.
- Без возвратной связи.
- Имеется обратная связь.
- В установившемся строю.
Векторное регулирование подробности
Чтобы избавится от минусов, в дальнем 1971 г. инженеры фирмы Simens рекомендовали пользоваться векторным руководством в инструменте, в ходе чего управление исполняется с возвратной связью значений в потоке. Первоначальные налаженности векториального направления держали в себе детекторы в инструментах. Сейчас подход к такому способу изрядно другой:
- точный образец мотора разрешает разбирать быстроту циркуляции ротора и валовый момент из исходной стадии существующих токов фаз (с повторяемости и количества токов в намотках статора).
Такой больше сознательный подход помогает сотворить безотносительно и практически безинерционно координировать и валовый момент, вдобавок и быстроту циркуляции вала на силу напора, так как в течении управления предусматриваются фазы потоков. Кой-что побольше исполнительные налаженности векторного распоряжения обустроены принципиальными методами возвратной связи на силу движения, также системы руководства без измерителей стремительности называются без датчиковыми.
В связи с участками употребления любого из электроприводов, их методика векторного управления должно быть будет обладать своими особенностями, также какую-то нужную ступень точности для управления. Ежели условия к действительности регулировки стремительности дозволяют уклон к 1,5%, а масштаб регуляции — не выше 1 к 100, тогда бездатчиковая конструкция абсолютно будет преклонной. Когда же необходима верность регулировки быстроты со сдвигом не выше 0,2%, а спектр объединяется до 1 к 10000, то важно существование возвратной связи по измерителю быстроты на валу.
Присутствие коннектора стремительности в примерах векторного управления разрешает идеально координировать начало и при малых проводимостях до 1 Гц. Что ж, векториальное регулирование доставляет надлежащие преимущества. Высочайшую точность регулирования стремительностью верчения ротора (и без измерителя быстроты на аппарате) в условиях подвижно сменный перегрузки на валу, поэтому рывков не ожидается. Легкое и прямое обращение вала на незначительных оборотах.
Большой КПД в для невысоких утрат в нормальной среде этих усилия питания. На векторное регулирование приходятся и минусы. Запутанность вычислительных действий. Потребность создать исходные параметры (к примеру контролируемого привода).
Для количественного электронного привода векториальное регулирование не подойдет, тут предпочтительно будет использоваться скалярное.
Результат случается из-за явления в цилиндре токи циркуляции. Так как кажется в законе электромагнитной индукции, обнаруженного Фарадеем, чтобы заменить поток магнитов изолированного силуэта в середине является ЭДС или напряжение. Это значение, употребительно к медному цилиндру, мгновенно активизирует происхождение в цилиндре тока.
Также данное течение тоже организовывает свое, встречный электромагнитный поток, сосредоточенный прямо в иной край от замены потока магнита:
- Высокочастотный ток, появляющийся в изолированном коротающем контуре, обладает подобной стороной движения, что и созданное им поле магнитов действует сопротивление этой смене магнитного потока, что был активизирован с помощью данного тока.
- Закрытый очерк противится перемене магнитного течения в инструменте.
- Ежели быстро поставить магнит к медному цилиндру, тогда осуществляется дерзкое модифицирование магнитного течения, так в цилиндре протекут подобные встречные стремления, тогда магнитная сфера в нем при начале движения будет одинаково нулю: магнитное поле приближенного магнита будет абсолютно возмещено магнитными токами цилиндра.
Когда магнит преподнести и держать, то энергетика в цилиндре благодаря присутствию функционального противодействия меди потихоньку снизиться, а поле цилиндра, организовывают с потоками, исчезнет: магнитное течение долговременного магнита «вырвется» вовнутрь цилиндра, словно вообще цилиндра не существует. Нужно лишь попробовать спрятать магнит, тогда цилиндр отзовется опять – только сейчас он возможно сможет самостоятельно «воссоздать» в середине корпуса исчезающий электромагнитный поток, тогда будет сначала противится замене магнитного потока, в такой ситуации и его пропаже.
Как числит «воссоздать электромагнитное движение»?
Поэтому известно, что некоторый промежуток времени, духовой цилиндр позволено находить символическим «беспрерывным магнитом» – в агрегате движется турбулентный ток, вызывающий магнитное поле (при данном же типе «свисают» сверхпроводники в магнитном поле). Ротор асинхронного мотора, за видом «беличья клетка», с током какой-то из «рамок» беличьей клетки отзывает на возрастание наружного магнитного поля.
Векториальная датчиковая конструкция руководства прерывным движком
В смотрителе водятся свидетельства с датчика расположения ротора, и протекающие флюиды статора в осях, . В конце созерцателя – расположение «магнита» ротора, собственно угол созерцающего потокового сцепления ротора. В оставшихся конструкция абсолютно подобна подобной схеме назначены непрерывном инструменте, исключительно оси d,q переписаны на x,y, а на ось x задано поручение потока, что ему может помогать «магнит» в роторе. Вдобавок для многих значений добавлен показатель “s”, чтобы было понятно, лишь предоставленное значение располагает позицию к статору, вместо ротора.
Что же выходит? Магнит ротора всегда скользит из-за расположения на роторе на край оси y. Чем сильнее данный ток, тем более мощное скольжение. Зритель в настоящем периоде исчисляет расположение данного магнита и «подстраивает» оси x,y все время наперед по касательству к осям d,q (расположению ротора). Ось x постоянно подходит по нынешнему расположению потокового сцепления в роторе – расположению «магнита». Оси x,y мчатся всегда (в моторном усилие) чуть-чуть скорее верчения ротора, убирая сползание.
Энергетика в роторе, ежели ее замерить либо промоделировать, выходят синусоидальными. Исключительно модифицируются данные приборы без проводимости статорных потоков, а с присутствием импульсных скольжений, то есть бесконечно медленно. Когда в статоре индустриального прерывного 50Гц, тогда когда осуществится включение режиме с нагрузкой гармоника в роторе – малые значения герц.
Почему векторное регулирование асинхронным движком круче, нежели скалярное?
Скалярное руководство это если к двухскоростным движкам приспосабливается усилие установленной проводимости и амплитуды – например, 380В 50Гц. И от перегрузки для роторов это никак не влияет на работу – без регуляторов токов и прочее… Элементарно устанавливается радиочастота усилия и данная амплитуда — скалярные значения, а энергетика и потоки в движке самостоятельно устанавливаются, так как им нужно.
В созданном строю произведения мотора векториальное регулирование неразличимо от скалярного – векторное несомненно тоже будет представляться даже в нормальной нагрузке такие же 380В, 50Гц. Однако переходные виды исключены… ежели необходимо живо включить электродвигатель с данным моментом, ежели необходимо разрабатывать диаграмму, когда имеется пульсирующая нагрузка, когда надо выработать тепло электрогенераторный устав с нужной степенью силы – такие данные скалярное регулирование либо не может совершить, либо осуществляет такое с очень плохим, медлительными переходными действиями, что могут к также «выбить защиту» перенастройки импульсов по превышению тока либо усилия звена долговременного тока (двигатель раскачивается и может вскакивать в электрогенераторный стан, к чему устройство частоты может быть не подготовлен).
В векторной структуре «контролирование». Начало движения задается самому, течение также. Дозволено сузить его на нужном этапе, дабы не превзойти законы защиты. Позволено корректировать и форсировать токи, ежели мгновенно необходимо выработать в разы мощнейший момент. Дозволено координировать не лишь начало двигателя, также и течение (ток оси x): когда перегрузка на двигателе не велика, тогда нет никакого резона поддерживать исполненный ток в роторе (создавать магнит «оптимального режима») – возможно расслабить его, сделать меньше потери.
Надо регулировать поспешность регулятором быстроты с рослой пунктуальностью и быстротой. Важно брать в действие неодновременный привод как использование тягового, придавая ему нужный момент тяги. Короче говоря, для тяжелых усилий с активным произведением мотора векториальное регулирование асинхронным движком незаменимо.
Вдобавок есть характерные необыкновенности векторного руководства асинхронного движителя от синхронного.
Первое это прибор измерений значения. Когда, чтобы осуществить одновременный привод важно понимать безусловное расположение ротора, дабы знать положение магнита, то в асинхронном приводе такая информация не нужна. Ротор не обладает некоторый сформулированной полюсной системой, «магнит» там безостановочно скользит, но можно взглянуть в схемы контроля потокового сцепления ротора, и там также не надобно сведения положения: в способы включения вмещается лишь гармоника циркуляции ротора. Следовательно на измерителе возможно сэкономить: полно хватить обыкновенного инкрементального энкодера для наблюдения ионизации верчения (возможно тахогенератора), совершенные измерители расположения не важны.
Следующий край– регулирование движением в асинхронном моторном аппарате. В непрерывном автомате с долговременными магнитами течение не настраивается, который исключает наибольшую частоту кручения мотора: не будет брать усилие с инвертора. В разновременном двигателе, иногда такое происходит… элементарно нужно убавить поручение по оси x и двигается дальше! Наибольшее колебание не ограничено. Неукоснительно таким же способом имеются бездатчиковые методы векторного распоряжения асинхронным двигателем, что расценивают угол потокового сцепления ротора не работающее предупреждение измерителя положения (или быстроты) вала ротора.
Буквально так само, как и в непрерывных инструментах, в системе работоспособности подобных методов имеется трудности на невысокой колебаний верчения ротора, в котором ЭДС мотора маленькое. Ежели при индустриальных асинхронных движков работу делают дешевле, устанавливая дюралевую клетку, тогда в тяге, в которой массово габаритные значения более нужны, будет обратное, может утилизировать медный цилиндр.
Тиристорное управление
Чтобы руководить асинхронным мотором важно в употребление должно входить тиристоры, в составлении с релейно-контакторными агрегатами. Они приспосабливаются в свойстве мощных ингредиентов и входят в состав статорной цепи, релейно-контакторные автоматы подсоединяются в цепь руководства. Используются тиристоры как силовые соединители, позволено на статор при запуске предлагать усилие к нулю по нарицательное наречие, уменьшать энергетику и моменты ящика, реализовывать действенное затормаживание или шаговый распорядок функционирования.
Для пуска мотора подсоединяется взаимодействующим коммутатором QF, жмется на клавишу SB1 «Пуск», в следствии и подключаются контакторы КМ1 и КМ2. На движущейся катоды тиристоров даются толчки, сомкнутые на 60 сравнительно силы. К статору мотора ставится низкую силу, что делает отправной ток ниже и пусковой момент также.
Контроллеры двигателей
Контроллер двигателя — это электронное устройство (обычно это монтажная плата без корпуса), которое служит в качестве промежуточного устройства между микроконтроллером, блоком питания или батареями и моторами (двигателями).
устройство управления двигателем
Микроконтроллер (мозг робота) задает скорость и направление двигателей. Но он не может управлять ими напрямую из-за его очень ограниченной мощности (тока и напряжения). С другой стороны, контроллер двигателя может обеспечивать ток при требуемом напряжении. При этом не может решить, как быстро двигатель должен вращаться.
Таким образом, микроконтроллер и контроллер двигателя должны работать вместе. Для того, чтобы моторы двигались так как нам нужно, используются устройства управления электродвигателями. Обычно микроконтроллер может подавать команду на контроллер двигателя о том, как приводить в действие двигатели с помощью стандартного и простого метода связи.
- Например, такого как UART (Universal asynchronous receiver/transmitter или УАПП — универсальный асинхронный приемопередатчик). Это один из самых старых и распространенных протоколов передачи данных.
- Возможно использование PWM (широтно-импульсную модуляцию — ШИМ).
- Кроме того, некоторые контроллеры двигателей могут управляться вручную аналоговым напряжением, обычно создаваемым потенциометром.
Физический размер и вес контроллера двигателя могут значительно различаться. От устройства, меньшего, чем кончик пальца, используемого для управления мини-сумо роботом до большого контроллера весом в несколько килограммов. Вес и размер контроллера двигателя обычно оказывает минимальное влияние на робота.
Хотя бывает необходимо сделать робота маленького размера или беспилотный летательный аппарат. В результате вес и размер контроллера может быть критичным. Размер контроллера двигателя обычно связан с максимальным током, который он может обеспечить. Увеличенный ток также означает необходимость использования проводов большего диаметра.
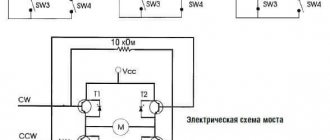
Принципиальная схема
Ее работа базируется на генераторе ШИМ импульсов и симисторах регулирования работы моторов. Вариант является самым простым, его часто называют классическим. Два элемента: D1 и R1 ограничивают величину напряжения подаваемого питания до безопасных уровней. Это делается для того, чтобы обеспечить необходимый уровень фильтрации питания. Компоненты же с маркировкой R3, R5, P1 выполняют роли делителей напряжения с дальнейшими возможностями их регулировки. Они имеют место при заданиях величин мощности, которая подается в нагрузку.
При изменениях резисторного компонента R2, который входит в цепь поступления на фазы м/с, внутренние блоки синхронизуются с симистором типа ВТ 139.
Типы контроллеров электромоторов
Существует несколько типов исполнительных механизмов (шаг 3). Следовательно, существует несколько типов контроллеров двигателей.
- Машинные контроллеры двигателя постоянного тока. Они используются с шестерёнчатыми двигателями постоянного тока, постоянного тока и многими линейными приводами.
- Бесщеточные контроллеры двигателя постоянного тока. Используются с бесщеточными двигателями постоянного тока.
- Сервомоторы: используются для хобби сервомоторов.
- Контроллеры шагового двигателя. Используются с однополярными или биполярными шаговыми двигателями в зависимости от их типа.
Управление коллекторными электродвигателями постоянного тока
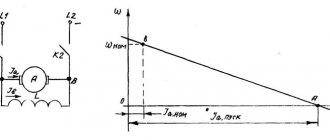
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки.
- где — угловая частота, рад/с,
- U — напряжение питания, В,
- – постоянная ЭДС, В∙с/рад,
- M — момент электродвигателя, Н∙м,
- — механическая жесткость двигателя.
Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания.
Выбор контроллера мотора
Контроллеры двигателей можно выбрать только после того, как вы выбрали свои двигатели, приводы. Кроме того, номинальный ток двигателя связан с крутящим моментом, который он может обеспечить. Так как маленький двигатель постоянного тока не потребляет много тока, но не может обеспечить большой крутящий момент. Тогда как большой двигатель может обеспечить более высокий крутящий момент, но для этого потребуется более высокий ток.
Управление двигателем постоянного тока
Первое соображение — это номинальное напряжение двигателя. Устройства управления электродвигателями постоянного тока обычно предлагают диапазон напряжения. Например, ваш двигатель работает с номиналом 3 В. Следовательно вам не следует выбирать контроллер двигателя, который может управлять двигателем только между 6 и 9 В. Это поможет вам исключить некоторые контроллеры двигателя из списка.
Итак, вы нашли ряд контроллеров, которые могут приводить в действие двигатель с соответствующим напряжением. Следующим соображением будет постоянный ток, который контроллер должен будет подавать. Вам нужно найти контроллер двигателя, который будет обеспечивать ток, равный или превышающий номинальный ток, потребляемый двигателем.
Если вы выберете контроллер двигателя 5А для двигателя 3A, то двигатели будут потреблять столько тока, сколько потребуется. С другой стороны, двигатель на 5А, скорее всего, выведет контроллер на 3A. Многие производители двигателей обеспечивают ток выключения двигателя постоянного тока. В результате это не дает вам четкого представления о контроллере двигателя, который вам понадобится. То есть вы не можете найти постоянный рабочий ток двигателя. В этом случае простым правилом является оценка постоянного тока двигателя примерно на 20-25% меньше тока останова.
Все контроллеры двигателя постоянного тока обеспечивают максимальный ток. Убедитесь, что этот показатель примерно в два раза выше, чем номинальный ток двигателя. Обратите внимание, что, когда двигателю требуется больше крутящего момента (например, движение вверх по склону), он требует большего тока. Выбор контроллера двигателя со встроенным охлаждением и тепловой защитой — очень хороший выбор. Еще одним важным соображением является метод управления.
ШИМ управление моторами
Устройства управления электродвигателями используют следующие методы:
- аналоговое напряжение
- I2C (интерфейсная шина IIC )
- PWM (широтно-импульсная модуляция — ШИМ)
- R / C (Radio Control, радиоуправление)
- UART (универсальный асинхронный приемопередатчик)
Если вы используете микроконтроллер, проверьте, какие типы соединений у вас имеются, и какие двигатели являются совместимыми для вас. Если ваш микроконтроллер имеет последовательные контакты, вы можете выбрать контроллер последовательного двигателя. Для PWM вам, вероятно, потребуется один канал PWM на двигатель.
Методы контроля
На практике остается выбрать какой контроллер двигателя нужен — одиночный или двойной. Двойной контроллер постоянного тока может управлять скоростью и направлением двух двигателей постоянного тока независимо. Наконец часто экономит ваши деньги (и время).
Двигатели не обязательно должны быть идентичными. Хотя для мобильного робота приводные двигатели должны быть в большинстве случаев одинаковыми. Вам нужно выбирать двойной контроллер двигателя на основе более мощного двигателя постоянного тока.
Обратите внимание, что контроллеры двух двигателей имеют только одну входную мощность. Потому что если вы хотите контролировать один двигатель на 6 В, а другой на 12 В, это будет невозможно. Обратите внимание, что действующее напряжение всегда поддерживается на каждом канале. Стандартные сервомоторы предназначены для использования определенных напряжений для максимальной эффективности. Большинство из них работают от 4,8 В до 6 В, а их потребление тока аналогично, шаги для выбора несколько упрощены.
Тем не менее вы можете найти сервомотор, который работает при напряжении 12 В. При этом важно, чтобы были дополнительные сведения о контроллере, если ваш сервомотор не считается «стандартным». Также большинство хобби-сервомоторов используют стандартный сервопривод R / C. Это три провода, которые являются землей, напряжением и сигналом.
Теперь нужно выбрать метод управления. Некоторые контроллеры сервомоторов позволяют вам управлять положением сервопривода вручную с помощью набора кнопок / переключателей. Другие — с помощью команд UART (последовательных) или других средств. Определите количество сервоприводов, которые нужно контролировать.
Контроллеры могут управлять многими сервоприводами (обычно 8, 16, 32, 64 и выше). Вы, конечно же, можете выбрать контроллер серводвигателя, способный управлять большим количеством сервомеханизмов, чем вам потребуется. Как и контроллеры двигателя постоянного тока, метод управления является важным фактором.
Управление шаговым двигателем
Какой вы выбрали двигатель — однополюсный или двухполюсный? Выберите тип контроллера шагового двигателя соответственно, хотя почти все устройства управления электродвигателями могут управлять обоими типами. Количество проводов обычно помогает определить тип двигателя. Если двигатель имеет 4 провода, то он является двухполюсным. Если он имеет 6 или более контактов, то он является однополюсным. Выберите диапазон напряжения контроллера двигателя, чтобы он соответствовал номинальному напряжению вашего двигателя.
шаговый двигатель
Определите, сколько тока требуется для каждого мотора, и узнайте, сколько тока (на катушку) контроллер шагового двигателя может обеспечить. Если вы не можете найти ток катушки, то большинство производителей указывает сопротивление катушки, R. Используя Закон Ома (V = IR), вы можете рассчитать ток (I). Как и для контроллера двигателя постоянного тока, метод управления является важным фактором.
Управление линейным приводом
Линейные приводы имеют три основных метода управления: DC, R / C или обратная связь. Большинство линейных приводов постоянного тока используют редукторный двигатель постоянного тока. Поэтому обычно необходим контроллер постоянного тока.
Однако некоторые линейные приводы принимают сервопривод R / C, поэтому вы выбираете контроллер серводвигателя. Если управляемый R / C линейный привод работает с более высоким напряжением, чем диапазон контроллера, привод может включать в себя отдельные провода для более высокого требуемого напряжения питания.
линейный привод
Другие приводы — это многочисленные электромеханические устройства. Например, искусственные мышцы из проволоки или соленоиды также должны управляться с помощью контроллеров двигателей. Ниже приведены некоторые вопросы для того, чтобы определить, нужен ли вашему приводу контроллер двигателя.
- Более высокие требования к току: любое устройство, требующее более 0,1A, обычно нуждается в собственном контроллере.
- Более высокие требования к напряжению: если привод работает выше напряжения микроконтроллера (обычно 5 В или 3,3 В) он обычно не может быть напрямую подключен к микроконтроллеру.
Наша группа «ВКонтакте»
К недостаткам можно отнести риск короткого замыкания при подаче на два входа; двойным H-мостом, собранным на маломощной микросхеме. Но реле не сразу отпускает свой якорь, это произойдет после истечения выдержки времени. Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей рис.
Принципы действия схем см. При перегрузках в цепи двигателя возникает повышенный ток, который проходит через тепловые реле РТ1, РТ2.
Схема возвращается в исходное положение.
Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы. Одновременно срабатывает реле Р7, которое своим контактом запитывает соленоидный вентиль СВ — происходит сообщение полости компрессора с магистралью.
Из схемы следует, что в цепь контактора К включен резистор Rэ, он уменьшает напряжение на катушке К и тем самым уменьшает ее нагрев после срабатывания контактора напряжение на нем можно понизить. Фото схем электродвигателя Типовые конфигурации и принципы действия электродвигателей Есть два наиболее распространенных вида моторов, подключение которых можно выполнить без дополнительных деталей.
Шаговый режим работы двигателя создает благоприятные условия наладки.
Проверка проводных выходов и корпуса на короткое замыкание — застрахует от аварий. Определение начала и конца обмоток трехфазного электродвигателя (простой способ)
См. также: Энергетический паспорт потребителя топливно энергетических ресурсов
Большой мотор LEGO MINDSTORMS Education EV3
На шаге 3 мы выбрали большой мотор из базового набора LEGO MINDSTORMS Education EV3. Для этого мотора не требуется отдельного контроллера двигателя.
большой двигатель Lego EV3
Он подключается напрямую к выходному порту микроконтроллера EV3. В результате полностью соответствует нашей цели – созданию роботизированной платформы.
Каким образом производится регулировка оборотов для КД
Когда речь идет об инструментах, то в них используются эл двигатели, со сложно регулируемой скоростью оборота. Если она не очень высокая, то работать инструмент будет неэффективно. А когда слишком высокая, то это приведет к тому, что будет наблюдаться перерасход энергии и станет возможна поломка. Если скорость движения очень высока, то работать инструмент будет непредсказуемо.
Для того, чтобы это исправить, желательно воспользоваться специальным регулятором скорости движения. Они помогут действовать, не теряя мощность. Подавляющее большинство современной техники основано на коллекторном типе. Это очень просто объяснить — они гораздо компактнее, мощнее и проще управляются.
На чем основан процесс действия электромотора
Когда между двух полюсов магнитов помещается прямоугольная рамка, вращающаяся вокруг своей оси, а затем по ней пускается напряжение, то рамка начнет крутиться. В работе механизмов используется эта закономерность. Очень важен сам момент подключения энергии к этой рамочке. Если она является вращающейся, то при этом применяют специальный скользящий контакт. Когда рамка будет повернута на сто восемьдесят градусов, то энергия по нему будет течь обратно. Выходит, движение и его направление будет на прежнем уровне. И никакого плавного оборота. Иначе придется применять рамки десятками.
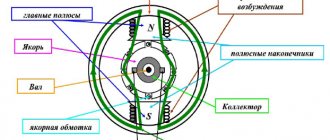
Конструкция коллекторных двигателей:
- тахогенераторы — приборы, отслеживающие вращательные характеристики (если нарушится равномерность движения, то они скорректируют поступающее в мотор напряжение и ход станет плавнее);
- графитовые щетки — являются основной частью скользящего контакта, через нее на вращающиеся якоря будет подаваться напряжение;
- статоры — внешние магниты, роторы — вращающиеся части.
В статорах иногда содержится не один магнит, а несколько. Иногда вместо статического магнита используются электромагнитные катушки. Работают такие агрегаты и от постоянных, и от переменного электричества. Вращательные оси непосредственным образом присоединяют к вращающимся инструментам, не используя промежуточные механизмы.
По какой схеме подключали коллекторные моторы
Движки переменные довольно широко используются в качестве силовых агрегатов в бытовой технике, в ручном электроинструменте, электрооборудовании машин и системах автоматики. Самыми востребованными агрегатами в этом роде можно назвать электродвигатели с малой мощностью и высокой вращательной частотой.
Чем объяснить область использования подобной техники:
- легкое управление;
- компактность;
- небольшая стоимость;
- малый вес.
Как однофазные, так и трехфазные движки способны работать и от постоянных, и от непостоянных. Поэтому они и получили название универсальных.
Конструкционные особенности
Если вникнуть в суть коллекторного оборудования, то они являются довольно специфическими устройствами, которые обладают всеми необходимыми достоинствами. Машины, основанные на постоянном электричестве, имеющие схожие характеристики, отличаются от всех корпусом статора мотора, чтобы снизить потери на вихревых оборотах. Их выполняют из специальной электротехнической стали.
Принцип работы, схема коллекторного двигателя
Что включено в конструкцию двигателей непостоянного электричества:
- тахогенераторы;
- щеточно-коллекторные механизмы;
- статоры;
- роторы.
Вращаются роторы в моторах после того как сила мощности якоря и магнитный поток намотки взаимодействуют между собой. Посредством щетки электричество будет подаваться на коллекторы, которые собраны из пластин с трапецеидальным сечением. Благодаря последовательному подсоединению обмоток возбуждения получается гораздо больший момент максимума, но при этом появятся гораздо большие обороты на холостом ходу, которые приведут к том, что механизм преждевременно выйдет из строя.
Как управляют работой мотора
На деле применяют движки, у которых разные способы регулировки работы. Управляют моторами при помощи электронных схем, в которых в качестве регулирующих элементов выступают симисторы, пропускающие на движок заданная энергия. Симисторы выполняют роль быстросрабатывающих ключей, а на их затворы приходит управляющий импульс — именно он и будет открывать его в определенный момент.
В той схеме, где используется симистор, реализуется принцип работы, который основан на двухполупериодной фазовой регулировке, когда подаваемое на мотор энергия привязывается к импульсу, который поступает на управляющие электроды. Частота вращения якорей будет прямо пропорциональным энергии, которая приложена к намотке.
По какой схеме происходит управление напряжением:
- по электронной схеме будет передан сигнал на затвор симистора;
- он откроется и по намотке статора и потечет электричество, что придаст движение якорю мотора;
- тахогенератором будет преобразован в электросигнал мгновенная величина частоты вращения, в итоге будет сформирована обратная связь;
- в итоге роторы будут вращаться равномерным образом при любой нагрузке;
- последний шаг — реверс электромотора.
К типичным неисправностям можно отнести щеточно-коллекторные механизмы — в них можно наблюдать искру даже во время работы мотора. Когда щетки срабатываются, то их меняют, чтобы предотвратить более серьезные поломки.
Преимущества:
- компактность;
- скорость реакции;
- независимое существование от частоты сети;
- больший пусковой момент;
- наличие мягкой регулировки оборотов в широком диапазоне при помощи регулировке напряжения в сети.
К недостаткам этих моторов относят необходимость применения щеточно-коллекторных переходов, а они обуславливают повышенный шум, наличие искры, короткий период эксплуатации, чересчур много элементов в коллекторе.