Устройство
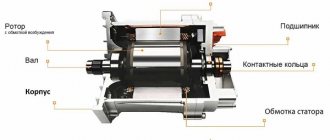
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
- Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
Что касается перегрузочных способностей
Тут все зависит от токов возбуждения. Если повысить перегрузочную способность и принцип работы двигателя и при этом снизить силу электричества, то сделать это можно, увеличив питание возбуждения на возбудителе. При автоматическом изменении питания участвует реле напряжения, а его катушку подключают к питающим сетям мотора посредством трансформаторов электричества и промежуточных реле. Если питание в сети нормальное, то катушка открыта. При снижении силы электричества контакты закрываются и на катушку подходит питание.
Повышение перегрузочной способности механизмов
Также повысить перегрузочную способность мотора, когда снижается электричество в сети, можно увеличив питание возбуждения. Автоматически изменить питание возбуждения можно через реле питания, но его катушка должна подключаться к питающим сетям механизма посредством трансформатора для электричества, а также промежуточных реле. Если нормальное электричество в сети, то то контакты в цепях открыты. А при его снижении, они закрываются и на катушку идет питание, затем реле будут шунтироваться своими контактами реостаты в цепях возбудителей.
Перегрузочная способность синхронного мотора
Благодаря форсировке возбуждения получится на короткое время повысить перегрузочную способность двигателей, тем самым получается дополнительная реактивная мощность. После увеличения питания статора во время форсировки повысится устойчивость оборудования при пониженном питании, а увеличивается отдаваемая им реактивная мощность, поэтому хорошо это скажется на режиме работы потребителя в данных узлах нагрузок.
После того как становится понятным выражение максимального момента, становится понятно, что последние перегрузочные способности агрегатов являются пропорциональными первой степени напряжения. Это отличается от асинхронных движков — ведь у них она является пропорциональной квадрату питания. Можно сделать вывод, что синхронные модели механизмов являются не такими чувствительными к смене напряжения.
Вывод:
посредством реактивного момента получается увеличить крутизну на рабочем участке угловой характеристики и в некотором роде повысить перегрузочную способность мотора. Выходит, что перегрузочные способности синхронных моделей будут не такими чувствительными к снижению питания в сети, нежели у асинхронных агрегатов. Это очень важно!
Принцип работы
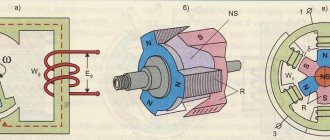
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
Рис. 4. Схематическое обозначение синхронного электродвигателя
Электрические машины
МОиН РФ
Омский государственный технический университет
Кафедра «Теоретическая и общая электротехника»
Электрические машины
ЛЕКЦИЯ: “ Магнитное поле и основные параметры синхронных машин. Холостой ход синхронного генератора. Реакция якоря. Метод двух реакций. Электромагнитные параметры в относительных единицах.”
Омск 2005
1. Основные термины и определения (ГОСТ “Машины электрические вращающиеся”).
1. Характеристика холостого хода электромашинного генератора (характеристика холостого хода)
— зависимость электродвижущей силы обмотки якоря вращающегося электромашинного генератора от тока возбуждения при разомкнутой обмотке якоря и при заданной частоте вращения
2. Нормальная характеристика холостого хода электромашинного генератора (нормальная характеристика холостого хода)
— усредненная характеристика холостого хода электромашинного генератора, выраженная в относительных единицах
3. Магнитная индукция в рабочем зазоре вращающейся электрической машины — а
мплитуда основной гармонической в кривой распределения магнитной индукции в рабочем зазоре в режиме холостого хода при номинальном напряжении вращающейся электрической машины
4. Реакция якоря вращающейся электрической машины —
воздействие магнитодвижущей силы обмотки якоря на магнитное поле вращающейся электрической машины, создаваемое обмоткой возбуждения или постоянными магнитами
5. Продольная реакция якоря вращающейся электрической машины (продольная реакция якоря)
— реакция якоря вращающейся электрической машины, образуемая составляющей намагничивающей силы обмотки якоря, создающей магнитный поток, направленный по продольной оси полюсов
6. Поперечная реакция якоря вращающейся электрической машины (поперечная реакция якоря)
— реакция вращающейся электрической машины, образуемая составляющей намагничивающей силы обмотки якоря, создающей магнитный поток, направленный по поперечной оси полюсов
7. Составляющая намагничивающей силы обмотки по продольной оси синхронной машины (составляющая намагничивающей силы по продольной оси)
— составляющая намагничивающей силы обмотки, направленная вдоль оси полюсов индуктора синхронной машины
8. Составляющая намагничивающей силы обмотки по поперечной оси синхронной машины (
составляющая намагничивающей силы по поперечной оси) — составляющая намагничивающей силы обмотки, которая направлена перпендикулярно к оси полюсов индуктора синхронной машины
9.Составляющая тока обмотки по продольной оси синхронной машины
(составляющая тока по продольной оси) — составляющая тока обмотки, создающая составляющую намагничивающей силы обмотки, направленную по продольной оси синхронной машины
10. Составляющая тока обмотки по поперечной оси синхронной машины
(составляющая тока по поперечной оси) — составляющая тока обмотки, создающая составляющую намагничивающей силы обмотки, направленную по поперечной оси полюсов индуктора синхронной машины
2. Холостой ход синхронных генераторов
Под холостым ходом автономного синхронного генератора понимается такой режим работы, когда ротор вращается приводным двигателем, а ток в разомкнутой обмотке якоря равен нулю. В этом случае магнитное поле машины будет создаваться только током обмотки возбуждения. Это поле можно разложить на две составляющие: основное поле, магнитные линии которого проходят через воздушный зазор и сцепляются с обмоткой якоря, и поле рассеяния полюсов, магнитные линии которого сцепляются только с обмоткой возбуждения.
Магнитный поток основного поля при вращении ротора индуцирует в обмотке якоря ЭДС. К ЭДС, индуцируемой в обмотке якоря синхронного генератора, и к напряжению на его выводах предъявляется требование, чтобы их форма приближалась к синусоидальной. Это вызвано тем, что при синусоидальных ЭДС и напряжении ток в якоре и в нагрузке при линейном характере магнитной цепи и нагрузки также будет синусоидальным. Вследствие этого общие потери в генераторе и у потребителей уменьшаются, так как будут отсутствовать добавочные потери от высших гармонических. Проверка синусоидальности кривой выполняется для линейного напряжения при рабочей схеме соединения обмотки якоря. Критерием для оценки служит коэффициент искажения синусоидальности кривой, выраженный в процентах:
где Em
,
Emv
— амплитудное (или действующее) значение основной и высшей гармонической составляющей ЭДС.
Стандартом предписывается иметь коэффициент искажения кривой линейного напряжения в трехфазных генераторах переменного тока частотой 50Гц не более 5 % для генераторов мощностью свыше 100 кВ∙А и не более 10% для генераторов мощностью до 100 кВ∙А.
Рис. 1. Полюс явнополюсного синхронного генератора с неодинаковым воздушным зазором (а) и распределение магнитной индукции в зазоре (б)
→
Рис. 2. Полюсное деление неявнополюсного синхронного генератора (а) и кривая распределения МДС возбуждения (б)
Для получения кривой ЭДС, близкой к синусоиде, прежде всего необходимо, чтобы кривая поля возбуждения машины была по возможности ближе к синусоиде. В явно-полюсной машине для этого зазор между полюсом и статором выполняют неодинаковым (рис. 1, а). Обычно под краями полюса зазор принимают в 1,5—2 раза большим, чем под серединой. Распределение индукции
под полюсом при такой конфигурации его наконечника показано на рис. 1, б. Там же штриховой линией для сравнения, показана кривая индукция при равномерном зазоре.
В неявнополюсной машине улучшение формы поля возбуждения достигается выбором соотношения между обмотанной и необмотанной частями полюсного деления (рис. 2, а). Пренебрегая влиянием пазов, создающих некоторую ступенчатость в кривой МДС и индукции, можно принимать, что МДС возбуждения, а также кривая поля распределены по окружности цилиндрического ротора с неявными полюсами по закону трапеции. Тогда амплитуды основных гармоник МДС и индукции поля будут соответственно равны:
где FB1
и
Вσ1
—максимальные значения 1-й гармонической МДС обмотки возбуждения на один полюс и
индукции в зазоре
;
wB
,
I
B —витки обмотки возбуждения на полюс и ток возбуждения.
В целях улучшения кривой поля возбуждения необмотанную часть выбирают равной τ/3 (α=π/3). В этом случае ( в кривой поля будут отсутствовать все гармоники с номером, кратным 3, а остальные высшие гармоники будут ослаблены. Кроме того, для улучшения формы кривой индуцированной ЭДС применяют распределение обмотки якоря по пазам и укорочение ее шага. В крупных многополюсных машинах улучшению кривой ЭДС способствует применение обмоток с дробным q
.
Важной характеристикой синхронной машины является характеристика холостого хода
. Она представляет собой зависимость ЭДС, индуцируемой в обмотке якоря Е, от тока в обмотке возбуждения
I
B при неизменной частоте вращения ротора. Эта характеристика позволяет оценить насыщение магнитной цепи машины, кроме того, ее используют для построения векторных диаграмм и других характеристик машины.
Расчетным путем характеристика холостого хода может быть получена из расчета магнитной цепи.
На рис. 3 показана схема для снятия характеристики холостого хода опытным путем. С помощью резистора R
B ток возбуждения изменяют от максимального значения до нуля, записывая при этом показания амперметра и вольтметра. Опытная характеристика холостого хода показана на рис. 4 штриховой линией. При
I
B= 0 ЭДС равна ЭДС от остаточного магнетизма
EOCT
=2÷3 %
UHOM
. При расчетах обычно используют характеристику холостого хода, которую получают, смещая опытную характеристику вправо на отрезок A0 (сплошная линия).
На основании сравнения характеристик холостого хода различных синхронных генераторов было установлено, что эти характеристики мало отличаются друг от друга, если построение их производить в относительных единицах. При переводе ЭДС в относительные единицы ее текущее значение в вольтах делят на номинальное напряжение якоря (Е*=E/UHOM
). Относительное значение тока возбуждения находят по отношению текущего значения тока возбуждения в амперах к току, принятому за базовый
I
B,б . За базовый ток возбуждения
I
B,б принимается ток, соответствующий по характеристике холостого хода
E=UНОМ.
| Рис. 3. Схема для снятия –характеристики холостого хода | Рис. 4. Характеристика холостого хода |
Полученные таким образом характеристики называются нормальными характеристиками холостого хода. Данные этих характеристик для явнополюсных и неявнополюсных генераторов приведены в таблице.
| I B | 0 | 0,5 | 1 | 1,5 | 2 | 2,5 | 3 | 3,5 |
| E * |
Примечание. В числителе дроби дана ЭДС явнополюсных генераторов (гидрогенераторов), а в знаменателе — неявнополюсных генераторов (турбогенераторов).
3. Реакция якоря
Если одиночный трехфазный синхронный генератор подключить к симметричной нагрузке, то по фазам обмотки якоря будут протекать равные, но сдвинутые относительно Друг друга на электрический угол, равный 120°, токи. Эти токи создадут вращающееся магнитное поле. Поле якоря перемещается в пространстве с той же частотой вращения и в ту же сторону, что и поле возбуждения, т. е. по отношению друг к другу эти поля будут неподвижны. Результирующее поле машины при нагрузке будет создаваться совместным действием МДС обмотки возбуждения и МДС обмотки якоря. Оно будет отличаться от поля при холостом ходе.
Воздействие МДС якоря на поле машины называется реакцией якоря. Характер этого воздействия зависит от взаимного расположения в пространстве полей возбуждения и якоря. Поле возбуждения всегда направлено по оси полюсов и обусловливает ЭДС в проводниках обмотки якоря. Принято ось, совпадающую с осью полюсов, называть продольной осью машины, а ось, перпендикулярную ей, — поперечной. Ориентация поля якоря в пространстве зависит от распределения тока в проводниках его обмотки, что в свою очередь определяется углом сдвига этого тока от индуцируемой ЭДС. В дальнейшем этот угол сдвига будем обозначать буквой ψ. Угол ψ изменяется от π/2 до -π/2 и зависит от характера нагрузки генератора. Рассмотрим с качественной стороны проявление реакции якоря в трех крайних случаях.
Токи в фазах отстают от соответствующих ЭДС на угол ψ=π/2. Если пренебречь относительно малым активным сопротивлением фазы якоря, то можно считать, что такому углу соответствует индуктивный характер нагрузки.
На рис. 5 показан поперечный разрез двухполюсного синхронного генератора. Для упрощения обмотка каждой фазы представлена одновитковой катушкой с диаметральным шагом. Будем считать, что магнитное поле полюсов имеет синусоидальный характер. При вращении ротора в обмотках фаз якоря наводятся ЭДС, направление которых определяется по правилу правой руки. Для момента времени, изображенного на рис. 6, направление этих ЭДС показано значками: крестик и точка вне пределов проводника. Максимальная ЭДС будет индуцироваться в проводниках фазы А, расположенных под серединами полюсов, где индукция имеет максимальное значение.
| Рис. 5. Реакция якоря при чисто индуктивной нагрузке (ФB — поток возбуждения; | Рис. 6. Векторная диаграмма синхронного генератора для момента времени, изображенного на рис. 5 |
Для упрощения обмотка каждой фазы представлена одновитковой катушкой с диаметральным шагом. Будем считать, что магнитное поле полюсов имеет синусоидальный характер. При вращении ротора в обмотках фаз якоря наводятся ЭДС, направление которых определяется по правилу правой руки. Для момента времени, изображенного на рис. 5, направление этих ЭДС показано значками: крестик и точка вне пределов проводника. Максимальная ЭДС будет индуцироваться в проводниках фазы А, расположенных под серединами полюсов, где индукция имеет максимальное значение.
На рис. 6 показана векторная диаграмма ЭДС и токов. Величину и направление мгновенные значения токов в фазах и их направление определяют, проектируя векторы токов IA
,
IB
,
IС
на вертикальную ось. Исходя из этого, на рис. 5 внутри проводников показано направление токов в фазах. Как следует из рис. 5 и 6, ток в фазе А в рассматриваемый момент времени равен нулю, а в фазах В и С токи равны, но противоположны по направлению. Эти токи создают магнитное поле, направление которого, определенное по правилу буравчика, показано на рис. 5. По отношению к оси полюсов оно является продольным и направлено навстречу полю возбуждения. Таким образом, при индуктивной нагрузке в синхронном генераторе возникает продольная размагничивающая реакция якоря вследствие чего результирующий поток и индуцированная в обмотке якоря ЭДС будут меньше, чем при холостом ходе.
Если, использовав правило левой руки по рис. 5, определить направление сил f
, действующих на проводники якоря, то можно установить, что на проводники, расположенные под одним и тем же полюсом, действуют силы, направленные в противоположные стороны, и результирующий электромагнитный момент машины будет равен нулю. Таким образом, при продольной реакции якоря в синхронном генераторе не создается электромагнитного момента.
Емкостная нагрузка. Токи фаз опережают соответствующие ЭДС на угол ψ=-π/2. На, рис. 7 дан поперечный разрез синхронного генератора, соответствующий тому же моменту времени, что и на рис. 5. На нем согласно векторной диаграмме (рис.  показано направление токов в проводниках обмотки якоря. В рассматриваемом случае распределение тока по проводникам якоря сохраняется таким же, как и при индуктивной нагрузке, но изменяется на противоположное направление тока в фазах В
показано направление токов в проводниках обмотки якоря. В рассматриваемом случае распределение тока по проводникам якоря сохраняется таким же, как и при индуктивной нагрузке, но изменяется на противоположное направление тока в фазах В
и
С
. В соответствии с этим поле якоря по отношению к оси полюсов! будет также продольным, но оно будет оказывать намагничивающее действие на поле возбуждения. Следовательно, при емкостной нагрузке реакция якоря в синхронном генераторе будет продольной и намагничивающей.
По аналогии с предыдущим случаем можно показать, что при емкостной нагрузке не создается электромагнитный момент.
| Рис. 7. Реакция якоря при чисто емкостной нагрузке | Рис. 8. Векторная диаграмма синхронного генератора для момента времени, изображенного на рис. 7 |
Нагрузка, соответствующая ψ=0. В этом случае токи фаз будут совпадать с индуцированными в них ЭДС. Для этого синхронный генератор должен быть нагружен не на активную, а на активно-емкостную нагрузку . Емкостное сопротивление хCНГ
должно быть подобрано так, чтобы оно компенсировало индуктивное сопротивление фазы обмотки якоря.
Разрез машины и векторная диаграмма для рассматриваемого случая показаны на рис. 9, 10. Максимальный ток будет в фазе А, где в данный момент ЭДС также максимальна. В фазах В и С токи в 2 раза меньше, чем в фазе А, и противоположно направлены току в фазе А. Магнитное поле, созданное токами якоря, по отношению к оси полюсов, является поперечным. Оно будет ослаблять поле на набегающей половине полюса и усиливать его на сбегающей половине полюса.
Поперечное поле якоря не изменяет потока, если машина ненасыщенна, и будет несколько уменьшать его в насыщенной машине. Таким образом, при нагрузке, когда ψ=0, возникает поперечная реакция якоря, искажающая магнитное поле в зазоре машины. Для данного случая электромагнитные силы, создаваемые током, протекающим по проводникам обмотки статора, направлены в одну и ту же сторону, совпадающую с направлением вращения ротора.
Рис. 9. Реакция якоря при ψ=0
→
Рис. 10. Векторная диаграмма синхронного генератора для момента времени, изображенного на рис. 9
Рис. 11. Разложение тока I
на продольную
I
d и поперечную
Iq
составляющие
Поскольку эти проводники вместе со статором неподвижны, то возникает реакция на ротор, направленная в сторону, противоположную его вращению. Таким образом, при ψ=0 электромагнитные силы в генераторе будут создавать тормозной момент, действующий на ротор.
В общем случае, когда 0<|ψ|<90°, ток I
можно разложить на две составляющие (рис. 11).
Одна из этих составляющих I
q совпадает по фазе с ЭДС, создает поперечную реакцию якоря и носит название
поперечного тока якоря
. Другая составляющая
I
α. перпендикулярна ЭДС, создает продольную реакцию якоря и носит название
продольного тока якоря
. Таким образом, в общем случае в машине при нагрузке будет существовать как продольная, так и поперечная реакция якоря.
4. Особенности реакции якоря в явнополюсном генераторе. Метод двух реакций
Магнитный поток якоря пропорционален МДС обмотки якоря F
a и обратно пропорционален магнитному сопротивлению Rμ контура, по которому этот поток замыкается. Основную часть магнитного сопротивления составляют воздушные промежутки σ между статором и ротором. В неявнополюсном генераторе можно принять, что вдоль всего полюсного деления машины σ=const, а следовательно, Rμ=const. Поэтому в этих генераторах поток якоря и индуцируемая им ЭДС
Е
а являются функцией МДС
F
а и не зависят от положения оси этой МДС относительно полюсов.
В явнополюсной синхронной машине ротор в магнитном отношении является несимметричным (по продольной его оси воздушный зазор меньше, чем по поперечной). Вследствие этого при изменении характера нагрузки и угла ψ магнитное сопротивление для потока якоря будет меняться. Поэтому в явнополюсном генераторе созданный якорем магнитный поток и его форма зависят от двух величин — МДС F
a и угла ψ. Это вызывает затруднения в учете влияния поля якоря на поле возбуждения.
Рис. 12. Разложение МДС якоря F
а на две составляющие:
F
d и
F
q
Для облегчения учета реакции якоря в явнополюсной машине широко применяется метод двух реакций, предложенный в 1895 г. французским электротехником А. Блонделем.
Согласно этому методу 1-я гармоника МДС реакции якоря F
a раскладывается на две составляющие:
На рис. 12 для двухполюсной машины показаны векторы МДС F
α и составляющие этой МДС
F
d и
F
q. Пространственный вектор МДС
F
α на рисунке ориентирован в соответствии с распределением тока
i
в проводниках обмотки статора (внешняя окружность). Предполагается, что ток отстает от индуцированной ЭДС на угол ψ. Направление ЭДС
е
в проводниках определено по правилу правой руки и показано на внутренней окружности рис. 12.
Составляющая F
d совпадает с осью полюсов и является
продольной составляющей реакции якоря
. Составляющая
F
q направлена перпендикулярно оси полюсов и является
поперечной реакцией якоря
. Можно принять, что первая составляющая создается током
I
d, а вторая — током
I
q (см. рис. 11). Первые гармоники МДС составляющих реакции якоря будут равны:
По оси каждой из составляющих реакции якоря воздушные зазоры между статором и ротором неизменны, поэтому потоки, созданные этими составляющими, будут зависеть только от соответствующих МДС. Распределение кривой поля для каждой из составляющих реакции якоря сохраняет свою форму при любых значениях угла ψ и будет зависеть от зазора и конфигурации полюсного наконечника.
При расчетах и построении векторных диаграмм для синхронных явнополюсных машин приходится определять результирующую МДС при нагрузке от совместного действия обмоток возбуждения и якоря. Но эти обмотки имеют различное пространственное распределение, и поэтому одинаковые МДС этих обмоток создадут различные потоки 1-й гармоники в зазоре машины. Распределенная обмотка якоря создает синусоидальные МДС Fd и Fq, а сосредоточенная обмотка возбуждения образует МДС FB прямоугольной формы. Поэтому, чтобы определить результирующую МДС, требуется сделать приведение одной МДС к другой. Так как обычно при расчетах и построении диаграмм используется характеристика холостого хода E=f(FB)
, то целесообразно сделать приведение МДС якоря к обмотке возбуждения.
Для того чтобы для МДС Fd и Fq найти эквивалентные им по действию МДС обмотки возбуждения Fad и Faq, требуется умножить первые соответственно на коэффициенты kd
. и
kq
:
Таким образом, МДС обмотки возбуждения Fad
и
Faq
будут создавать такое распределение полей, 1-е гармоники которых будут индуцировать в обмотке якоря такие же ЭДС, как и 1-е гармоники полей, созданных МДС
Fd
и
Fq
(соответственно).
5. Электромагнитные параметры в относительных единицах
В теории установившихся, и особенно переходных, процессов синхронной машины широко используются относительные единицы. При этом за базисные величины тока, напряжения, сопротивления и индуктивности цепи якоря принимаются их номинальные фазные значения:
; . (1)
Относительные значения сопротивлений г, х,
z
и индуктивности
L
цепи якоря:
; ; ; . (2)
Относительные величины индуктивности L*
и соответствующего ей индуктивного сопротивления
х*
таким образом, равны.
Действующие значения тока I
и напряжения
U
якоря в относительных единицах:
; . (3)
Относительная величина тока возбуждения рассмотрена выше при построении нормальной характеристики холостого хода.
6. Основные положения
1. Для улучшения синусоидальности распределения магнитного поля в воздушном зазоре синхронной машины:
— в явнополюсной машине зазор между полюсом и статором выполняют неодинаковым;
— в неявнополюсной машине достигается выбором соотношения между обмотанной и необмотанной частями полюсного деления (обмотка обычно занимает 2/3 полюсного деления).
2. Нормальная характеристика холостого хода:
| I B | 0 | 0,5 | 1 | 1,5 | 2 | 2,5 | 3 | 3,5 |
| E * |
(в числителе дроби дана ЭДС явнополюсных генераторов (гидрогенераторов), а в знаменателе — неявнополюсных генераторов (турбогенераторов)).
3. Воздействие МДС якоря на поле машины называется реакцией якоря
.
4. Ток якоря I
и намагничивающую силу, созданную им, раскладывают на две составляющих:
Это называется метод двух реакций.
5. За базисные величины тока, напряжения, сопротивления и индуктивности цепи якоря, при представлении их в относительных единицах, принимаются номинальные фазные значения.
7.
Контрольные вопросы и домашнее задание
| № | Содержание | Литература |
| 1 | Какой процесс, происходящий в синхронном генераторе, называется холостым ходом? | 2, § 4-4 |
| 2 | Что является критерием для оценки синусоидальности кривой ЭДС, индуцируемой в обмотке якоря синхронного генератора (указать формулу расчёта) | 2, § 4-4 |
| 3 | Способы улучшения формы кривой ЭДС в явнополюсной и неявнополюсной синхронной машине? | 2, § 4-4 |
| 4 | Что понимают под характеристикой холостого хода электромашинного генератора? | 2, § 4-4; 3, §33-2 |
| 5 | Что такое нормальная характеристика холостого хода? | 2, § 4-4 |
| 6 | Что такое реакция якоря? | 3, §33-1 |
| 7 | Как изменяется реакция якоря синхронного генератора при емкостном, активном и индуктивном характере нагрузки? | 3, §32-2 |
| 8 | Как зависят магнитные потоки реакции якоря явнополюсной и неявнополюсной синхронной машины от МДС обмотки якоря? | 3, §32-2 |
| 9 | В чем заключается метод двух реакций? | 3, §32-2 |
| 10 | Определить продольную и поперечную составляющие МДС якоря трехфазного синхронного генератора при номинальной мощности Sном = 150 кВА; U1ном = 6,3 кВ; cosψ = 0,8, если его четырехполюсная обмотка статора с обмоточным коэффициентом kw1 = 0,92 содержит в каждой фазе по w1 =312 последовательно соединенных витков, а нагрузка генератора – номинальная | 1, §33-1 |
8. Литература
1. Токарев машины.– М.: Энергоатомиздат, 1990, 624 с.
2. Копылов машины – М.: Логос, 2000, 607с.
3. Вольдек машины. – Л.: Энергия, 1978. – 832с.
Получить текст
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Рабочий процесс
Синхронный двигатель это электротехническое устройство, работающее на основе закона электромагнитной индукции. Принцип работы и устройство СД предусмотрены из условия практического применения этого физического явления. Магнитное поле создается трехфазной обмоткой, размещенной в пазах статорного пакета аналогично цепи асинхронной машины. На роторе размещена обмотка возбуждения, питаемая постоянным током. Питание к ней подводится через щетки и кольца. Постоянный ток, протекающий по возбуждающей обмотке, взаимодействует с вращающимся полем индуктора, что вызывает круговое движение вала. Вращающий момент зависит от токовой нагрузки и не зависит от скорости. Вот почему этот тип привода называется синхронный электродвигатель, то есть частота оборотов якоря равна скорости поля индуктора.
После запуска синхронный двигатель переменного тока вращается одновременно с магнитным потоком. СД не может запускаться с помощью только питающей сети. Это объясняется инерционностью роторного блока и высокой скоростью вращающегося поля. Схема включения маломощной машины предусматривает использование пусковых (демпферных) обмоток, с которыми она работает как синхронный двигатель с короткозамкнутым ротором (то есть реализуется асинхронный пуск). В случае мощных электроприводов пуск производится вспомогательным электромотором или преобразователем частоты.
Наибольшее распространение получил асинхронный пуск, предусматривающий устройство дополнительной КЗ-обмотки. В этом случае синхронный двигатель с короткозамкнутым ротором запускается аналогично асинхронному эл/двигателю. Вследствие таких действий роторный механизм разгоняется до скорости вращающегося магнитного потока. Если синхронный электродвигатель нагружается, расстояние между полюсами якоря и поля увеличивается. Как результат, якорный механизм отстает на нагрузочный угол, что соответствует отставанию от своего положения на холостом ходу.
Устройство и принцип действия синхронного двигателя предусматривают эксплуатацию привода с постоянной скоростью, которая не зависит от нагрузки. СД не рассчитан на нагрузку, величина которой превышает пусковую мощность между роторным механизмом и магнитным потоком. В противном случае синхронизм прерывается, и работа синхронного двигателя останавливается.
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Механическая и угловая характеристика
В силу особенностей, присущих синхронному двигателю, значение его момента не зависит от оборотов вращения. Это свойство привода определяет его назначение и сферу применения. Технические качества приводного оборудования для конфигурирования электропривода оцениваются зависимостью частоты вращения мотора от электромагнитного момента, развиваемого им. Эта зависимость известна как механическая характеристика синхронного двигателя. Она может быть статической или динамической. Первая показывает поведение СД в стабильном рабочем режиме. Вторая характеризует его работу в переходный период.
Качество механических характеристик оценивается жесткостью. Относительно этого параметра все характеристики делятся на идеально жесткие, жесткие и мягкие. В связи с тем, что частота вращения ротора синхронного двигателя под нагрузкой не меняется, этот тип электромоторов обладает идеально жесткой характеристикой, что выражается формулой:
n = 60*f1/p,
где f1
– частота тока статора;
p –
число пар полюсов статорной обмотки.
Но зависимость n = f (M)
не отражает полного поведения мотора, в котором при увеличении нагрузки происходит смещение осей поля индуктора и якоря. Каждой нагрузке соответствует определенный угол между их осями. Уравнение угловой характеристики:
Mэм = Mmax*sin θ
Это формула, выражает приблизительную зависимость момента на валу от угла вылета ротора. В реальных условиях максимальному моменту соответствует угол, несколько меньший, чем 90˚. При этом перегрузочная способность СД равна: λм = Мmax/MN = 2–3.
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Общий принцип действия
По соответствию основному исполнению, статор считается якорем машины и имеет многофазную обмотку, чаще всего, рассчитанную на три фазы. Он выступает в качестве индуктора, обмотка ротора (возбуждения) служит для создания потока магнитной индукции возбуждения, ее питание осуществляется при использовании контактных колец, через щеточный механизм, от источника (якоря возбудителя). Конструктивное исполнение машины, прежде всего, зависит от необходимой частоты вращения, главным образом это сказывается на конструктивных особенностях ротора, он бывает двух основных видов, это явнополюсный и неявнополюсный типы.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
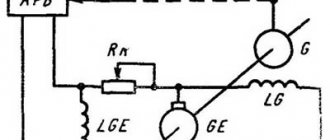
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Достоинства синхронных моделей
У них нет начальных пусковых моментов. Как это изобразить? Когда их подключают к сети переменного напряжения при неподвижности электромагнита, а по обмотке наступает прохождение постоянного напряжения, то в течение одного периода будут меняться электромагнитные моменты, а вместе с ними и меняется направление, потому что средний момент в течение периода будет равен 0. Во время этих условия двигатель не сможет вращаться из-за ротора, имеющего определенную инерцию. Об этом свидетельствует исследование.
Самые распространенные способы запуска:
- частотный — агрегат и его запитка плавно меняется от 0 до номинального показателя, а электромагниты вращаются синхронным образом с магнитными полями статоров;
- с помощью вспомогательных движков — роторы возбужденных моторов приводят во вращение до определенной скорости и при помощи синхронизирующих устройств подключают к сети, затем двигатель отключается (но при этом невозможно пускать механизм, который под нагрузкой, потому что неправильно пользоваться пусковым агрегатом с большей мощностью);
- асинхронный — движок пускают асинхронным способом, а для этого он снабжается специализированной обмоткой для пуска, напоминающей беличью клетку (для увеличения сопротивления стержней клетка изготавливается из латуни).
Схемам пуска синхронного двигателя
К плюсам этой разновидности моторов можно отнести наличие меньшей чувствительности к колебаниям энергии, потому что их максимальные моменты пропорциональны величине энергии в первой степени. Независимо от того, какая будет механическая нагрузка на валу, постоянство частоты вращения строгое, КПД растет.
Отрицательные моменты:
- конструкция сложная;
- пуск в ход тоже усложненный;
- трудно регулировать частоту вращения, потому что можно лишь изменить частоту питающего напряжения.
Если учесть все минусы синхронных моторов, то они являются гораздо не такими выгодными, нежели асинхронные, когда мощностя ограниченные до 100 кВт. Но когда мощность гораздо выше, а габариты машины меньше, то первые предпочитают вторым.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Способы подключения трехфазных электромоторов к сети 220 вольт
Некоторые профессионалы используют при работе электроинструменты с разным предназначением (технические моменты). Иногда они приводятся в движение 3-х фазными моторами. Только трехфазные сети не всегда доступны в обычных гаражах и домах. Тогда можно воспользоваться схемой подключения 3-х фазного двигателя к однофазной сети.
Самыми распространенными и используемыми в станках являются 3-х фазные асинхронные механизмы переменного напряжения, у которых короткозамкнутый статор. Именно их и приходится подключать. Когда включается мотор в 3-х фазную сеть на 3 обматывающих слоя, то в разные промежутки времени будут протекать переменные токи. Они создают магнитное поле, которое вращается и вращает статор.
Как действовать во время подключения агрегатов к однофазным сетям
Когда подключают движок к однофазной сети, питание по обмотке течет, только вращающееся магнитное поле не образуется и ротор остается без движения. В качестве выхода можно параллельно подключить конденсатор к одной из обмоток механизма. Конденсаторы импульсным способом получают и отдают энергию, создают смещенные фазы и образуется магнитное поле, вращающееся и рабочее. Учитывая нахождение емкости под питанием, его можно назвать рабочим конденсатором. Как его правильно подобрать? Можно рассчитать необходимую емкость, разделив давление силы тока на питание. Но не в каждом случае на моторе есть целостная табличка, где указаны данные. Также не следует сбрасывать со счетов величину нагрузки на агрегат. Так что приходится воспользоваться упрощенным расчетом емкости рабочего конденсатора. Нужно учитывать, что на каждые сто Вт мощности понадобится семь микрофарад емкости. Если агрегат запущен и он работает, то весь принцип действия был верным.
Нужно запомнить, что не в каждом случае чем больше, тем лучше и когда превышается оптимальная емкость рабочего конденсатора механизма, то он перегреется. Это приведет к тому, что сгорит обматывающий слой и электродвигатель сломается. Лучше подобрать конденсатор, у которого рабочее питание не меньше, чем 450 вольт. Самое лучшее решение — это бумажная версия конденсатора. Существуют даже специальные моторные модели. Если движок запускается под нагрузкой и сложно, тогда понадобится еще один конденсатор для пуска. Его подключают параллельно рабочему на короткий промежуток времени при запуске электромеханизма.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Плюсы и минусы
У синхронных движков очень сложная структура. Гораздо сложнее, нежели у асинхронных, только вместе с тем они имеют большим количеством достоинств. Главное положительное качество — это возможность поддержания оптимального режима энергии реактивного плана. Благодаря тому, что регулировка силы напряжения автоматическая, то мотор работает без использования и выделения реактивной энергии. В этом случае коэффициент мощности будет равняться единице.
Абсолютно не страшно, если случится перебой в сети, равняющийся максимальному моменту, но при этом критический момент равняется квадрату в электросети. Агрегаты способны выдерживать большие перегрузки даже тогда, когда увеличивается сила напряжения. Главное условие — непродолжительная нагрузка на валы. Скорость вращения остается постоянной. Трехфазные движки стоят дороже, нежели обычные асинхронные сложные механизмы, так как их устройство особое. Также к недостаткам можно отнести наличие постоянного источника энергии. В этом плане зачастую выступают выпрямители.