Определение числа пар полюсов в асинхронном электродвигателе активно реализуется, независимо от среды использования силовых агрегатов. Это помогает определять точное количество операций, для которых используется мотор и контролировать его ресурс. Обо всех особенностях мы напишем далее.
Асинхронный двигатель с экранированными полюсами
Асинхронный силовой агрегат представляет собой устройство, основное назначение которого – преобразовывать электрическую энергию в механическую, которая и приводит в движение рабочие компоненты оборудования. При этом, частота оборотов статорного магнитного поля по умолчанию больше аналогичного показателя ротора. Интенсивность вращения вала такого силового агрегата напрямую определяется количеством полюсов медной намотки. Данный показатель является одним из важнейших, определяющих функционирование мотора. Далее в статье мы расскажем об определении точного числа точек у моторов с асинхронным вращением ротора и статора.
Общие ведомости
По сути, количество полюсов – это всегда четное число (из-за этого и проводится подсчет именно пар точек, а не отдельных элементов). В современных асинхронных электродвигателях реализуется два типа обмотки:
Читайте также: Зачем нужно самообразование?
- сосредоточенная;
- распределенная.
Концентрированная обмотка подходит для бесщеточных двигателей. Вы можете легко изменить количество антиподов, изменив соединение катушек. Статор с шестью обмотками допускает два ключевых типа подсоединения. Один имеет месть на двух сторонах, второй – на четырех или восьми. Однако менять количество полюсов готового двигателя на четыре или восемь неразумно. Распределенная обмотка, которая часто используется для обеспечения 12 точек статора с девятью пазами, подходит для асинхронных двигателей. В таком случае количество подбирается еще до начала запуска намотки мотора.
Хотя небольшие двигатели обычно имеют четыре антипода, двухполюсные двигатели также используются для высокоскоростных приложений, требующих 50 или 60 оборотов в секунду. До того, как были введены бесщеточные двигатели, когда-то использовалась методика изменения количества полюсов в асинхронных силовых агрегатах с короткозамкнутыми якорями. Основа метода предполагает изменение типа соединения сложных обмоток, которые нельзя классифицировать как распределенную катушку или концентрированную обмотку. Данный способ был попыткой разрешить работу на двух разных скоростях путем изменения синхронной скорости. Модели моторов витками такой разновидностью называют моторами с расщепленными сторонами.
Дополнительно
Износостойкость электрическая (коммутационная) – число рабочих циклов (включения-отключения) под нагрузкой, на которое рассчитана защитная автоматика. На основании этой величины оценивают срок эксплуатации устройства. Оптимальный выбор – автоматический выключатель, УЗО или автомат, выдерживающий до 10 000 рабочих циклов.
Износостойкость механическая – число рабочих циклов без нагрузки. Этот параметр всегда больше предыдущей характеристики, но на практике не учитывается.
Подключение асинхронного двигателя к однофазной сети
Обратимся к конструкции трехфазного асинхронного двигателя. Как мы знаем, рабочих фаз двигателя – 3, и клемм для их подключения тоже 3. А в однофазной бытовой сети 220 Вольт проводов всего два – фаза и ноль. Что подключить на третью клемму двигателя? Если на нее подключить ответвление от любого из этих двух проводов, то мы получим просто короткое замыкание со всеми вытекающими последствиями.
Выходом является подключение такого ответвления через конденсатор. Слово «конденсатор» переводится на русский язык как «накопитель». Как известно, работает он по принципу «заряд-разряд». То есть, включенный в сеть конденсатор, какое-то время накапливает заряд, а потом, разряжаясь, отдает его обратно в сеть. Времени, в течение которого конденсатор накапливает заряд, вполне достаточно для того, чтобы фаза, от которой он питается, «ушла» вперед, сдвинулась по времени. Сдвинувшись, фаза как бы «освобождает место» для того разряда, который выдаст конденсатор, и исключает возможность «короткого» замыкания. Из-за того, что своей работой конденсатор «сдвигает» фазы, он называется фазосдвигающим. Более подробно про работу конденсатора в цепи переменного тока можно прочитать в этой статье. Таким образом, создается третий провод необходимый для подключения двигателя.
Схемы подключения к однофазной сети
Здесь все достаточно просто. Мы должны соединить конденсатор между двумя фазами. В схеме со звездой это будет выглядеть вот так.
Как устроен защитный автомат
Бонусом – устройство защитного автомата, несколько фото автомата, который приведён в начале статьи.
Устройство автоматического выключателя. Как видно, устройство непростое. Верхний (неподвижный) контакт – справа
Автоматический выключатель. За секунду до мусорки)
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
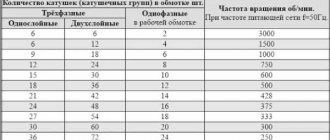
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов. Синхронная частота вращения для различного количества полюсов
| Числополюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 12 | 500 | 600 |
Зависимость частоты от числа пар полюсов
При рассмотрении вопроса о получении переменного тока указывают, что за один оборот ротора индуктированная в проводниках обмотки генератора электродвижущая сила (ЭДС) имела один период. Если ротор генератора делает, например 5 об/сек, то ЭДС будет иметь 5 пер/сек или частота тока генератора будет равна 5 Гц. Следовательно, число оборотов в секунду ротора генератора численно равно частоте тока.
Частота тока f выражается следующим соотношением:
где n – число оборотов ротора в минуту.
Для получения от генератора стандартной частоты тока – 50 Гц ротор должен делать 3000 об/мин, то есть
Однако наши рассуждения были справедливы только для двухполюсного генератора, то есть для машины с одной парой полюсов p.
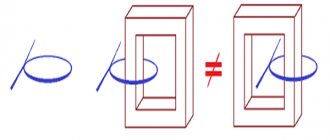
Если машина четырехполюсная, то есть число пар полюсов равно двум: p = 2 (рисунок 1), то один полный период изменения тока будет иметь место за пол-оборота ротора (1 – 5 положения проводника на чертеже). За второй полуоборот ротора ток будет иметь еще один период. Следовательно, за один оборот ротора четырехполюсной машины ток в проводнике имеет два периода. В шестиполюсной машине (p = 3) ток в проводнике за один оборот ротора будет иметь три периода.
Рисунок 1. Изменение переменного тока в проводнике ротора четырехполюсного генератора
Таким образом, для машин, имеющих p пар полюсов, частота тока при об/сек будет в p раз больше, чем для двухполюсной машины, то есть
Отсюда формула зависимости скорости вращения от частоты и числа пар полюсов будет иметь следующий вид:
Пример 1. Определить частоту переменного тока, получаемого от генератора с восемью полюсами (p = 4), скорость вращения ротора которого n = 750 об/мин. Подставляя в формулу для определения частоты тока значение p и n получим:
Пример 2. Определить скорость вращения ротора двадцатиполюсного генератора (p = 10), если частотомер показал частоту тока f = 25 Гц. Подставляя в формулу для определения числа оборотов ротора n значения p и f, получим:
Пример 3. Скорость вращения ротора асинхронного двигателя, составляет 250 об/мин. Определить число пар полюсов асинхронного двигателя, если частота тока питающей сети равна 50 Гц:
Следовательно, двигатель имеет 24 полюса.
Источник: Кузнецов М. И., «Основы электротехники» — 9-е издание, исправленное — Москва: Высшая школа, 1964 — 560 с.
www.electromechanics.ru
Параметры электродвигателя: таблица
| Наименование параметра | Единица измерения | Примечание |
| Тип | ||
| Номинальная мощность | Киловатт | |
| Номинальный ток | Ампер | Для трехфазных электродвигателей зависит от типа соединения обмоток |
| Номинальное напряжение | Вольт | |
| Коэффициент мощности (КПД) | ||
| Коэффициент полезного действия (cos ϕ) | % | |
| Номинальная скорость вращения | Обороты в минуту |
Но иногда табличка отсутствует, либо прочесть ее невозможно. При эксплуатации двигатель неоднократно окрашивают, нередко – вместе с табличкой. Поэтому приходится определять его параметры методом измерений.
Номинальный отключающий ток утечки
Эта величина показывает ток утечки, при котором срабатывает УЗО / дифавтомат. По номинальному отключающему току судят о чувствительности прибора. Единица измерения – миллиамперы (мА).
Ориентировочные значения номинального отключающего тока:
- 10 мА – для стиральной и посудомоечной машины, бойлера и другой техники, относящейся к влажной группе;
- 30 мА – для розеточной и осветительной группы;
- 100 мА – для защиты проводки от возгорания в маленькой квартире;
- 300 мА – для защиты проводки от возгорания в офисе или частном доме.
Электродвигатели в составе мотор-редукторов
Электрические двигатели уже давно стали включаться в состав различных мотор-редукторов. Они находят свое применение как в трёхступенчатых типа МЦ3У. так и в двухступенчатых типа МЦ2У. Электромоторы имеют практически 90%-ный коэффициент полезного действия, не требуют постоянного обслуживания. Немаловажным параметром является и исключительная экологичность электрического мотора, вредные выхлопы отсутствуют вовсе, что делает его незаменимым при установке внутри помещения. Словом, в настоящее время электромоторы признаны в 3, а то и в 4 раза эффективнее традиционных двигателей внутреннего сгорания.
Но иногда, в случае выхода из строя электродвигателя, покупатель узнает, что абсолютно никакой сопроводительной документации к нему не прилагается. Маркировочные шильды, если и сохранились, могут находиться в изношенном потертом состоянии, так, что ничего на них рассмотреть попросту бывает невозможно. Как же в таком случае можно определить мощность двигателя и число его оборотов? Здесь поэтапно будут приведены советы, которые помогут это сделать.
Следует иметь в виду, что под числом оборотов подразумевается так называемая асинхронная скорость. Синхронная скорость это скорость вращения магнитного поля. Асинхронная скорость несколько ниже синхронной из-за наличия массы у вращательного элемента, а также воздействия сил трения, которые могут значительно понизить КПД мотора. Впрочем, на практике эти различия практически никогда не имеет решающего значения.
Сейчас на рынке представлено 3 основные категории асинхронных электродвигателей. Первая категория каталога – моторы, работающие при 1000 оборотах. На практике это число составляет порядка 950-970 оборотов, но для наглядности все-таки округляют до тысячи. Вторая категория моторы, выдающие 1500 об/мин. Это также округлено, так как в действительности диапазон лежит в пределах 1430-1470. Третья 3000 оборотов в минуту. Хотя реально такой мотор выдает 2900-2970 вращений.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.
4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.
Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.
Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.
Не забывайте, что указанные цифры – это всего лишь приблизительная картина вращения, в реальности они могут отличаться и это зависит от множества факторов.
Эти статьи вам тоже пригодятся:
Теперь посмотрите это полезное видео:
Многие наверняка видели и уже имеют в своем гардеробе такие замечательные аксессуары из цветов канзаши. Эта статья научит вас технике их изготовления. Цветы из атласных лент – канзаси.
В данном уроке вы узнаете что такое модульное оригами и для изучения будет представлена схема сборки двойного лебедя, которого вы сможете собрать своими руками.
Для владельцев садовых участков, теплиц, гаражей и любых помещений, нуждающихся в утеплении. Загрузив такую печь один раз дровами можно будет потом пару суток к ней вообще не подходить.
Сейчас в продаже всё больше чупа-чупсы, твиксы и прочие заморские изделия. А почему бы Вам сегодня не сделать петушка на палочке и не порадовать своё дитя таким нестандартным подарком.
Как в походных, домашних и дачных условиях готовить продукт к копчению, подбирать коптильные дрова, мастерить самодельные коптильни, коптить продукт, и все это делать своими руками.
Параметры электродвигателя : тип соединения обмоток
Это очень важный параметр трехфазного электродвигателя. Все шесть выводов начал и концов обмоток выведены в барно двигателя. Подключить их можно либо в звезду, либо в треугольник.
Рядом с символами «треугольник/звезда»
на табличке указывается номинальное напряжение
– «220/380 В»
. Это означает, что при включении в сеть трехфазного тока напряжением 380 В обмотки двигателя нужно соединить в звезду. Ошибка в соединении приведет к выходу электродвигателя из строя.
Номинальный ток также указывается через дробь. В описанном случае необходимо значение, указанное в знаменателе.
Тип расцепителя
Тепловой – простой, дешевый и надежный расцепитель. Не боится загрязнений и вибраций. Время срабатывания определяется от значения тока перегрузки. Минусы: восприимчивость к перепадам температуры, вероятность ложных срабатываний при нагреве, постоянное потребление электроэнергии. Такой автомат устанавливают вдали от источников тепла.
Электромагнитный – характеризуется простой конструкцией и стойкостью к механическим воздействиям, например, ударам или вибрациям. Недостатки: мгновенное срабатывание, возникновение магнитного поля.
Электронный – имеет несколько вариантов настроек и точно их выполняет. К преимуществам относится и наличие индикации причины срабатывания устройства. Минусы: высокая стоимость, чувствительность к механическим нагрузкам и электромагнитным полям.
Магнитно-гидравлический – стойкий к вибрациям и температуре окружающей среды. Встречается в силовых автоматических выключателях.
Составляющие электромашины
Основой для электрической машины является правило электроиндукции с магнитной индукцией. Такой прибор включает в себя статор или как его называют константной частью (характерно для асинхронных, синхронных машин изменяющегося тока) или индуктора (для приборов константного тока) и ротора, его называют активной или движущейся частью (для асинхронных и синхронных машин изменяющегося тока) или якоря (приборов константного тока). В роли константной части для машин тока с малой мощью активно применяются магниты (неизменного состояния).
Автоматический модульный выключатель: устройство
Модульные автоматы поставляются в корпусах, изготовленных из негорючего пластика и предназначенных для установки на DIN-рейку. Для этого изделия оборудуются специальными защелками. Такая конструкция сильно упрощает монтаж. Аппараты имеют стандартизированные размеры: ширина выключателей указывается в модульных расстояниях (модулях), равных 18 мм.
Главная часть устройств – тепловые или электромагнитные расцепители, реагирующие на сверхтоки. Первые изготавливаются на основе биметаллических пластин, вторые – катушек с подвижными сердечниками. Кроме этого, внутри корпуса располагается дугогасительная камера, защищающая устройство от воздействия электрической дуги, и контакты, отвечающие за размыкание цепи.
Механическая характеристика двигателя
Механической характеристикой называется зависимость момента от скольжения при постоянном напряжении и частоте сети.
На рис. 19 показана механическая характеристика двигателя. При пуске двигатель развивает пусковой момент МП
(S = 1); если пусковой момент больше момента сопротивления рабочей машиныМС
, то ротор двигателя развернется и двигатель будет работать в точке a характеристики.
Увеличивая момент сопротивления рабочей машины МС
, мы будем увеличивать скольжение, и точка a начнет перемещаться по характеристике к точке В точке 1 двигатель развивает максимальный момент, скольжение, соответствующее максимальному моменту, которое называется критическим —SКР
. При увеличении момента
МС
выше момента
Мm
скольжение быстро растет и ротор двигателя остановится (происходит «опрокидывание» двигателя).
Отношение пускового момента к номинальному называется кратностью пускового момента:
Рис. 19. Механическая характеристика асинхронного двигателя
Кратность пускового момента указывается в каталогах справочных данных, она должна быть больше 0,9.
Отношение максимального момента к номинальному называется перегрузочной способностью двигателя:
Перегрузочная способность указывается в каталогах. Она обычно находится в пределах 1,7—2,5. Механическая характеристика имеет две характерные ветви: ветвь (A—B
) — устойчивая часть характеристики (с увеличением скольжения момент двигателя растет); ветвь (В
—
С
) — неустойчивая часть характеристики (с увеличением скольжения момент двигателя уменьшается). Если в цепь двигателя с фазным ротором вводить активное сопротивление, то максимальный момент, не изменяясь по величине, перемещается в область более высоких скольжений (рис. 20, механическая характеристика II). Можно подобрать такое сопротивление в цепи ротора, что максимальный момент будет при пуске.
Рис. 20. Механическая характеристика асинхронного двигателя с фазным ротором
Кривая I для двигателей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости. Асинхронный двигатель с фазным ротором с сопротивлениями в цепи ротора имеет более мягкую характеристику (кривая II). Увеличивая сопротивление в цепи ротора, можно сдвинуть максимальный момент и сравнять его с пусковым моментом.
Регулирование скорости изменением числа пар полюсов — Help for engineer
Регулирование скорости изменением числа пар полюсов
Регулирование скорости изменением числа пар полюсов стало возможным из-за секционной конструкции статора асинхронного двигателя с короткозамкнутым ротором. На практике выпускаются 2-х, 3-х, 4-х скоростные асинхронные двигатели, где число пар полюсов всегда кратно целому числу, вследствие чего, данный способ обеспечивает только ступенчатое регулирования скорости, а двигатели получили название многоскоростные. На деле существует большое количество схем включения обмоток статора, но наиболее часто используемые:
— переключение обмотки треугольник-двойная звезда; — переключение обмотки звезда-двойная звезда.
Треугольник-двойная звезда
Рисунок 1 – Схема переключения треугольник-двойная звезда
Рисунок 2 – Механическая характеристика при переключение с треугольника на двойную звезду
А — треугольник; Б — двойная звезда.
Данный тип регулирования скорости, в частных случаях осуществляет переключение скорости с некоторой временной рекуперацией энергии. Этот способ переключения занял нишу в грузоподъемных механизмах. Вы можете видеть, что при увеличении числа пар полюсов, скорость падает вдвое, но критический момент возрастает тоже в два раза, что дает нам возможность осуществлять подъем, но с более медленной скоростью. Называют такое условие работы – «тяговый» режим.
Сравнивая мощности, видно, что мощность изменяется незначительно, а скорость ступенчатым образом изменяется вдвое.
Рассматривая подробнее механическую характеристику при таком переключении, мы можем заметить, что работая в точке 1, кривая А, при включении на схему двойная звезда, асинхронный двигатель перейдет в точку 2 кривая Б, и начнет происходить рекуперативное торможение, до того момента, пока двигатель не перейдет в двигательный режим, а далее в точку работы 3 кривая Б. Данное торможение возможно, когда скорость вращения ротора асинхронного двигателя больше чем синхронная скорость. Частным примером такой работы мы рассмотрели в предыдущей статье про торможение противовключением, в которой рассказывалось как производят спуск груза в грузоподъемных механизмах с отдачей энергии в сеть.
Звезда-двойная звезда
Рисунок 3 – Схема переключения звезда-двойная звезда
Рисунок 4 – Механическая характеристика при переключение со звезды на двойную звезду
А — звезда; Б — двойная звезда.
На рисунке выше видно, что критическим момент остается прежним, а синхронная скорость уменьшается вдвое.
Говоря про мощность, то при переключении на двойную звезду, она возрастает вдвое. При переключении обмоток, работая в точке 1 кривая А, перейдем в точку 2 кривая Б, и с точки 2 в точку 3, так же как и в предыдущем случае будет осуществляться рекуперативное торможение.
Добавить комментарий
h4e.ru
Определение точного количества
Выше мы уже описали, как проводить регулировку скоростных показателей, используя число пар полюсов двигателя. А как самостоятельно определить точное количество данных пар?
Скорость оборотов мотора асинхронного типа в большинстве ситуаций интерпретируется как угловая частота оборотов его ротора. Как правило, точное значение показателя указывается на технической табличке, устанавливаемой сбоку на корпусе двигателя. Выражается показатель в оборотах за 1 минуту.
Трехфазные силовые агрегаты поддерживают возможность электропитания и от сетей с одной рабочей фазой, но для реализации такой идеи нужно подсоединить конденсатор. Осуществить это стоит не просто, а одновременно одной или нескольким его намоткам, ориентируясь на уровень напряжения сети питания. Принципиально на конструкцию двигателя это не повлияет.
Если в процессе работы ротор, находясь под нагрузкой за 1 минуту вращается 2760 раз, то его угловая частота будет равняться 289 радиан в секунду. Рассчитать это довольно просто:
2760 * 2пи/60рад.
Получившийся показатель является более техническим, неудобным для восприятия рядовым пользователем. Именно поэтому, рабочие показатели мотора указывают просто и понятно — в оборотах за одну минуту.
Уровень слаженной скорости такого мотора (без учета такого важного значения, как скольжение) равняется 3000 вращений. Это обусловливается тем, что питание стартерных намоток сети обладает частотой в 50 Герц. Каждую рабочую секунду магнитный поток будет осуществлять 50 полноценных перемен. Исходя из этого – 50*60 = 3 тыс. Результативный показатель – синхронная скорость работы электрического двигателя асинхронного типа.
Далее мы рассмотрим о другом методе определения уровня скорости оборотов условного трехфазного агрегата, проведя визуальный осмотр статора. Оценивая внешний вид стационарной детали, расположение медных намоток и точное число пазов, возможно с легкость точно определить количество оборотов мотора. Особенно такая возможность полезна, если в наличии нет такого измерительного устройства, как тахометр.
Регулировка скорости работы мотора
Многие задаются вопросом: — Для чего необходимо обладать информацией о количестве пар полюсов? Первое, что отличается удобством выполнения при помощи этих данных – это регулирование скорости вращений в асинхронном двигателе.
В современных производственных отраслях применяется довольно широкий перечень промышленного оборудования, выполняющего определенные задачи. При этом, нет необходимости обеспечивать плавность регулировки скорости оборотов, достаточно обладать ограниченным перечнем скоростей (только самых важных, чаще всего используемых). К такого типа агрегатам относятся станки в металлообрабатывающей и деревообрабатывающей отраслях, лебедки в добывающих скважинах, центробежных разделителях и др.
Лимитированное число рабочих скоростей оборотов с легкостью обеспечивается многоскоростными моторами короткозамкнутой конструкции (с экранированными полюсами). Здесь могут иметь место сразу две модификации такого оборудования:
- с одной статорной обмоткой, которая поддерживает функцию переключения, для реализации сразу разных пар полюсов;
- с несколькими намотками стационарного компонента, которые располагаются в одних и тех же пазах.
Взаимодействие роторной МДС со статорным элементом, реализуется только в ситуациях полного соблюдения равенства в количествах обмоточных пар этих двух компонентов. Именно поэтому, меняя количество полюсных пар на статоре, нужно обязательно поменять их и в роторе.
Если же имеет место асинхронный агрегат с якорем фазного типа, то для того, чтобы выполнить данное условие, необходимо иметь в наличии вспомогательных колец контактов. Эта особенность способствует увеличению внешних габаритов конструкции и, следственно стоимость.
Якорь короткозамкнутого регулирования с намоткой типа «беличья клетка» имеет в арсенале возможность автоматического генерирования набора пар, который будет равным такому же перечню, но уже со статорной движущей силой. Это качество обусловливает применение якорей коротких замкнутых в асинхронных моторах, работающих со многими скоростями.
Многоскоростные силовые агрегаты сразу с большим количеством катушек на статоре, уступают моделям с единой намоткой. Это выражается в бюджетном и технологическом плане. Устройства с множеством катушек слабо используют статорную обмотку, демонстрируют нерациональное использование пазов. Коэффициент полезного действия и cos ϕ на порядок ниже оптимальных показателей.
Эта важная особенность обусловливает то, что все чаще в производственной отрасли применяются электрические двигатели многоскоростного действия на 1 обмотку. Это выгодно, ведь агрегаты поддерживают переключение сразу на разный объем пар.
По сути, посредством переключения направленности движения токов в сфере намоток, параллельно меняют и способ работы с магнитодвижущими силами в середине статорной расточки. В результате получится измененная скорость оборотов МДС и, исходя из этого – непосредственно потока. Чаще всего применяется переключение в пропорции 1 к 2. Из этого следует, что намотки каждой из фаз создаются в форме двух сфер. Смена направления движения токов в какой-то из них дает возможность получать требуемое изменение объема полюсности вдвое.
Для большей информативности, давайте приведем пример таких действий на двигателе, который переключается на 8 точек и 4.
Асинхронный двигатель намотка
Для более простого восприятия, мы взяли изображение намотки всего одной фазы, конструкция которой включает две секции.
Если реализовывать поочередное подсоединение секций – при подключении окончания первой (1К) со стартом другой (2Н), то в результате у нас будет 4 пары точек иле же просто 8 полюсов. Когда провести замену направленности перемещения тока в другой области на обратную, тогда количество полюсов, которые генерируются намоткой, уменьшится вдвое. Какие-либо вариации тока в среде 2Н можно провести посредством разрывания перемычки между секциями 1К и 2К. Число сгенерированных полюсов станет в 2 раза меньше, что информативно продемонстрировано на изображении Б.
Такая смена числа полюсов получается в результате изменения направленности электрического тока в секции №2, посредством применения слаженного запуска с первой. Это указано на изображении В. Здесь, также, как и в ранее описанной ситуации, намотка создает 4 полюса, что полностью отвечает вдвое большим показателям оборотов электрического агрегата.
Когда мы осуществляем сопоставление двух намоток в многоскоростных машинах, стоит преимущественно использовать те схемы, которые обеспечивают в процессе работы требуемый характер зависимостей показателей. К последним относятся момент, допустимый по нагреву от скорости. Схемы кроме всего прочего должны иметь самое малое количество выводов и контактных элементов.
Группирование соединений
Опять таки для лучшего удобства, давайте введем критерий, с помощью которого можно будет легко и просто относить обмоточные соединения к определенной группе. Момент, который развивает электромотор с короткозамкнутым якорем рассчитывается по такой формуле:
Формула момента
Условные обозначения:
- p – точное число полюсных пар в статорной намотке;
- N2 – точное количество стержней катушки якоря при реализации типа «беличья клетка»;
- I2 – уровень тока роторного стержня;
- Ψ2 – угол сдвигания тока векторного типа, по отношению к электродвижущей силе ротора;
- Ф – поток магнитного действия одной полюсной пары.
Исходя из условий нагревания ротора (если пренебрегаются условия вентилирования), ток (I2), работая с несколькими парами полюсов, должен всегда находиться на одном уровне. Косинус угла Ψ2 от холостого хода и до номинального момента должен быть максимально приближенным к показателю 1.
При тщательном соблюдении всех этих условий момент машины выражается таким равенством:
М = с1*Фр.
(1)
Показатель С1 в свою очередь выражается другой понятной формулой:
Формула С1
Справедливости ради укажем формулу расчета электромагнитного момента, который измеряется в джоулях. (2)
Электромагнитный момент в джоулях
Приравняв два уравнения (1) и (2) мы получим такое значение Р, которое будет равняться 314 С1Ф.
Показатель мощности электромагнетизма силового агрегата при любом объеме полюсных обмотки статора, вычисляется при помощи соотношения напряжения элемента по фазам к количеству витков, которые находятся в фазной намотке и соединены последовательным способом.
Применяя данную особенность, можно с высокой долей точности проанализировать все описанные ранее методы переключения количества пар у полюсов. Давайте же посмотрим на изображения, в которых отображаются все ключевые случаи переключений с большого количества полюсных пар на меньшие. В нашей примерной ситуации это 8 полюсов на четыре.
Схемы переключения секций обмотки статора 8 и 4
Как можно видеть на схеме из рисунка А – все две секции являются обтекаемыми токами, движущимися в одном направлении. Все они полностью соответствуют высокому числу пар полюсов. В правой схеме (на рисунке Б) мы имеем встречное направление токов, благодаря чему можно судить о меньшем количестве пар полюсных пар.
Во всех этих случаях количество подключенных последовательным способом витков на обмотках 1 фазы остается на стабильном уровне. К ним дополнительно прилагается фазное напряжение, также на стабильно одинаковом уровне.
Исходя из всего вышеперечисленного, соотношение показателей мощностей в обоих случаях равняется 1, что указывает на работу со стабильным значением мощности (схематически – Р = константа). В этой ситуации для того, чтобы сохранить мощность на постоянном уровне, при изменении скорости на увеличенную вдвое, необходимо изменить показатель момента в обратной направленности его скорости.
Схематическое изображение переключения полюсов статорных катушек в пропорции 1:2
Принципиальная схема переключения полюсов обмотки статора в соотношении 1 к 2
Как можно видеть на графиках, подключение параллельного типа обмоточных секций позволяет изменять направление подачи тока в каждой из реализованных сфер. Данное значение отвечает за уменьшение числа пар. Вместе с этим, намотка создает сразу 2 звезды симметричного расположения, которые включаются на линейное напряжение. Применяя этот критерий, можно заметить, что когда осуществляется переход на увеличенную скорость оборотов, значение мощности увеличивается вдвое:
Значение мощности увеличивается вдвое
Данные показатели полностью соответствуют утверждению М = константа.
Условное сравнение схем
Если проводит сравнительный анализ всех вышеописанных схем по отношению к требуемому количеству выходов и контактных элементов на управленческий аппарат, можно заметить несколько особенностей:
- при подключении при помощи принципиальной схемы, необходимо иметь как минимум 9 выводов и 12 контактов;
- схема переключения при подсоединениях секций, дает возможность уменьшать число выходов до шести, а контактных деталей до восьми.
Принципиальная схема переключения полюсов обмотки
Представленные схемы указывают, что на 2-х скоростях соединения намоток были использованы «звезды» параллельного или последовательного типа. Если возникает необходимость внести изменения в напряжение, которое поступает на однофазную намотку, следует использовать сопряжение катушек с применением схемы обыкновенного или сдвоенного треугольника. В отдельных ситуациях можно даже комбинировать способы звезда – треугольник. При выборе последнего варианта все 3 секции намоток создают треугольник, а остальные 3 — соединяются с вершинами фигуры, создавая «лучи» типа «звезда».
Такие соединения активно применяются в приводах разнотипного оборудования, например, в прочных режущих станках. Также нередко модели используются в ситуациях, когда есть необходимость осуществить поочередное подключение треугольной схемой на 2 звезды, применяя параллельную компоновку.
Когда машина функционирует на малых вращениях, 2 секции каждой отдельной фазы, подключенные последовательным способом, создают линии треугольника, на углы которого осуществляется бесперебойная подача питания. В таком случае все сферы фазовой намотки окружаются током с одинаковыми показателями, что полностью совмещается с большим количеством пар.
С целью получения больших скоростных значений верха треугольника, который получился путем обмотки фаз, необходимо замкнуть коротко, а кабели подачи питания перенести в усредненные точки подключения обмоточных секций для каждой отдельной фазы. Исходя из этого, будут иметь место 2 звезды, подключенные параллельно.
Перед тем, как начать своими руками изготавливать обмотки, стоит знать, что процесс создания многоскоростных однообмоточных решений на порядок сложнее, чем двухобмоточных. То, сколько полюсов необходимо реализовывать в моторе, определяет скорость и интенсивность вращения вала силового агрегата и, как следствие – его общую продуктивность.
Способы определения характеристик электромотора
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как узнать характеристики электродвигателя без маркировки.
Расчет количества оборотов асинхронного двигателя
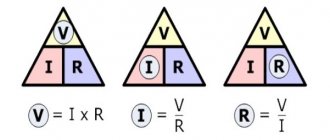
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС. Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:
- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z 1 / y, где 2р – количество полюсов, Z 1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:
- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z 1 b / h или 2 p = 0,5 D i / h,
где 2р – количество полюсов, Z 1 – число пазов, b – размер зуба, см, h – высота спинки, см, D i – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Полюса
Статор электродвигателя имеет сразу несколько пар катушек (р), которые подключаются к сетевому напряжению с определенным показателем частоты (f). В статоре создается намагниченное поле, которое в процессе работы вращается синхронно. Его рабочая скорость полностью соответствует частоте сети питания и рассчитывается по формуле ns = 60ф/п.
Это поле магнитного действия, вызывает напряжение в обойме ротора (которая представляет собой спрессованные листы, на которые нанесена медная или алюминиевая обмотка). Сгенерированный ток и поток магнитов вызывают вращения якоря. Если же ротор вращается с синхронной скоростью, он не будет вращаться по отношению поля, имеющего место в статоре. В якоре не будет индуцироваться напряжение, и сила, вращающая ротор, уменьшится.
Поэтому вал асинхронных двигателей всегда вращается с асинхронной скоростью относительно оперативности статорного МП. Отличия между этими скоростными данными называются скольжением, которое обычно варьируется в диапазоне от 3 до 5%.
Разница по сравнению с синхронной скоростью напрямую зависит от типа конструкции мотора, его эффективности. Далее мы все эти пункты рассмотрим подробнее.
Асинхронный двигатель с экранированными полюсами схема
Измерение скорости вращения
Измерение скорости вращения валов, шестерен, колес и других элементов, осуществляется, как правило, при помощи электронных тахометров. Типовая схема электронного тахометра приведена на рис. 26.
Тахометры измеряют скорость вращения n с размерностью . Уже первый взгляд на эту размерность позволяет понять, что тахометр должен выполнять два вида измерений одновременно. Во-первых, измерять количество оборотов (вала, шестерни, колеса и т.п.). Во-вторых, измерять время. Для выполнения таких измерений электронный тахометр (рис. 26) содержат электронный секундомер, фотоэлектрический датчик и логическое устройство ЛУ.
С устройством и работой электронного секундомера мы познакомились в предыдущем разделе. Теперь познакомимся с устройством и работой фотоэлектрического датчика. Он состоит из светодиода – излучателя СД, фотодиода – приемника ФД и формирователя электрических импульсов ФС1. Светодиод СД излучает свет на фоточувствительную поверхность фотодиода приемника ФД. При этом сопротивление фотодиода падает. Если на линии светового потока между светодиодом СД и фотодиодом ФД поместить непрозрачный материал, то сопротивление фотодиода ФД резко возрастет.
Рис. 26. Функциональная схема электронного тахометра
Это свойство фотоэлектрического датчика широко используется в технике и в измерениях. Для измерения скорости вращения между оптопарой – (светодиодом излучателем и фотодиодом приемником), помещают диск 1 с отверстиями, вращающийся на валу 2 (рис. 26). В процессе вращения вала 2 отверстия в диске будут прерывать световой поток между светодиодом СД и фотодиодом ФД. При этом сопротивление фотодиода ФД будет непрерывно изменяться синхронно с частотой вращения вала. Формирователь импульсов ФС1 реагирует на изменения сопротивления фотодиода, преобразуя каждое из их в стандартные по напряжению и длительности прямоугольные электрические импульсы на своем выходе (см. рис. 27, (а). Чем быстрее вращается диск 2, тем больше частота следования импульсов на выходе формирователя ФС1.
Теперь познакомимся с работой логического устройства ЛУ (рис. 26). Логическое устройство имеет два входа и один выход. Принцип его работы можно сформулировать как «2-И». То есть, если и на первый и на второй входы логического устройства ЛУ подано напряжение (условие «2-И» выполняется), то и на его выходе тоже будет напряжение. Если хотя бы на одном из входов ЛУ напряжения нет (условие два «И» не выполняется), то и на его выходе напряжения не будет. Данный принцип работы ЛУ хорошо иллюстрируют графики, представленные на рис. 27.
Рис. 27. Графики электрических импульсов при работе схемы электронного тахометра, (А) – импульсы на выходе формирователя ФС1 в точке А; (Б) – импульсы периодов времени счета (с выхода делительной декады ДД4); (В) – импульсы на выходе логического устройства (на входе в СчД1); (Г) – импульсы, обнуляющие счетные декады в момент начала нового периода счета
В процессе измерения тахометром скорости вращения вала 2 (рис. 26) на выходе формирователя ФС1в точке (А) вырабатываются электрические импульсы с частотой следования отверстий в диске 1. Эти импульсы подаются на первый вход логического устройства ЛУ. Одновременно с этим на второй вход ЛУ в точку (Б) от выхода делительной декады ДД4 поступают импульсы периодов времени счета.
Глядя на рис. 27. не трудно видеть, что условие «2-И» может периодически выполняться только в момент, когда на второй вход ЛУ в точку (Б) в течение 1 секунды подается напряжение 5 вольт. В это же время с выхода формирователя ФС1на первый вход ЛУ в точку (А) поступают электрические импульсы, вызванные вращением диска 2. Таким образом, на выходе логического устройства ЛУ в точке (В) формируются прямоугольные электрические импульсы, которые по внешнему виду повторяют импульсы, поступающие от формирователя ФС1. Они поступают на счетные декады СчД, поэтому этот режим называется «счет».
После периода счета импульсов, в течение следующего периода времени продолжительностью в 1 секунду, напряжение на втором входе ЛУ становится равным нулю. На выходе ЛУ напряжение тоже становится равным нулю, поскольку принцип «2-И» не выполняется. Счет не возможен. На счетных декадах в течение одной секунды отображается результат счета. Этот режим называется «индикация».
После режима «индикация» автоматическое устройство управления сбросом УУС (рис. 26) вырабатывает на своем выходе в точке (Г) короткий электрический импульс, который подается одновременно на входы обнулениявсехсчетных декад. Счетные декады обнуляются, и начинается новый режим счета. Таким образом, режимы «счет» и «индикация» циклически повторяются.
Чтобы по показаниям электронного тахометра определить скорость вращения вала, шестерни и пр., используют формулу:
(2.18)
где: N – результат счета на дисплеях счетных декад; k – количество отверстий в диске датчика; t – период времени счета.
Например, на дисплеях счетных декад электронного тахометра отобразилось число 2400. В диске датчика 80 отверстий. Период времени счета равен 1 секунде. В этом случае:
об/сек.
Если в окружности диска сделать 60 отверстий, а период времени счета будет равен 1 секунде, то с учетом того, что в 1 минуте 60 секунд, электронный тахометр будут показывать скорость вращения в размерности .
Абсолютная погрешность Δn измерения числа оборотов электронным тахометром вычисляется по следующей формуле:
, (2.19)
где: Δtизм – абсолютная погрешность длительности импульса времени (от нестабильности генератора опорных частот); nх – измеренная скорость вращения; tизм – длительность импульса времени (в нашем примере он равен 1 секунде).
Относительную погрешность измерения числа оборотов электронным тахометром определим по формуле:
(2.20)
Например, необходимо определить абсолютную и относительную погрешности измерения числа оборотов электронным тахометром, если он показывает величину измеренной скорости вращения nх = 1000 об/мин, а абсолютная погрешность длительности импульса времени Δtизм = 0,0001 с. Используя формулу (2.19) определим абсолютную погрешность измерения числа оборотов электронным тахометром:
Степень защиты корпуса
Данный показатель обозначается в виде кода IPXX, где первая цифра указывает на степень защиты от пыли, вторая – на степень влагозащиты.
Степень защиты от пыли и посторонних предметов:
- IP10 – защита от предметов размером 50 мм и более;
- IP20 – защита от предметов размером 12.5 мм и более (пальцы);
- IP30 – защита от предметов размером 2.5 мм и более (кабели, инструменты, проволока);
- IP40 – защита от предметов размером 1 мм и более (очень тонкие кабели).
Степень защиты от влаги:
- IP21 – защита от вертикальных капель;
- IP32 – защита от вертикальных капель, падающих под углом до 15°;
- IP54 – защита от брызг, падающих в любом направлении. Такой прибор устанавливается на открытом воздухе.
Теги
обмоток статора сетевымего статор.в статор уложенона статоре.поток статора одинна статор.пазов статора разделитеполюсов статора увеличиваютна статоре четыренапример статор имеетесли ротор подсобой ротор.название ротор.качестве ротора можетвала роторной части.обращении ротора вобращений ротора которыхпоказателя ротора.вращением ротора иже ротор вращаетсясетевым током спостоянного тока переменного тока постоянного тока Сгенерированный ток идвижения токов вдвижения токов вперемещения тока ввариации тока вэлектрического тока в
делению