Для решения задач контролируемого движения в современных прецизионных системах все чаще применяются вентильные (бесколлекторные) двигатели. Такая тенденция обусловлена преимуществами вентильных двигателей и бурным развитием вычислительных возможностей микроэлектроники. Как известно, вентильные (синхронные) двигатели обеспечивают наиболее высокие плотность длительного момента (момент в единице объема) и энергетическую эффективность по сравнению с любым другим типом двигателя.
Современный вентильный привод объединяет электрическую, механическую и электронную подсистемы в единое цельное мехатронное устройство. В рамках такого подхода удается значительно сократить габариты, избавиться от лишних преобразователей и промежуточных элементов, а значит, повысить надежность всего привода в целом.
В рамках данной статьи рассматривается принцип работы и устройство современных вентильных машин, описываются принципы управления вентильным преобразователем для коммутации с применением датчиков положения ротора, а также перечисляются особенности интегрированного исполнения вентильных двигателей.
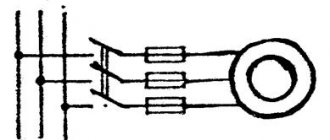
Схема вентильного двигателя
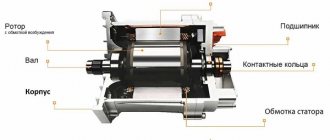
Двигатель состоит из следующих деталей:
1. Задняя часть корпуса. 2. Статор. 3. Подшипник. 4. Магнитный диск (ротор). 5. Подшипник. 6. Статор с обмоткой. 7. Передняя часть корпуса.
У вентильного двигателя имеется взаимосвязь между многофазной обмоткой статора и ротора. У них присутствуют постоянные магниты и встроенный датчик положения. Коммутация прибора реализовывается при помощи вентильного преобразователя, вследствие чего он и получил такое название.
Схема вентильного двигателя состоит из задней крышки и печатной платы датчиков, втулки подшипника, вала и самого подшипника, магнитов ротора, изолирующего кольца, обмотки, трельчатой пружины, промежуточной втулки, датчика Холла, изоляции, корпуса и проводов.
В случае соединения обмоток «звездой» устройство имеет большие постоянные моменты, поэтому такую сборку применяют для управления осями. В случае скрепления обмоток «треугольником» их можно использовать для работы с большими скоростями. Чаще всего количество пар полюсов вычисляется численностью магнитов ротора, которые помогают определить соотношение электрических и механических оборотов.
Статор может быть изготовлен с безжелезным или железным сердечником. Используя такие конструкции с первым вариантом, можно обеспечить отсутствие притяжения магнитов ротора, но и в это же мгновение снижается на 20% эффективность двигателя из-за уменьшения значения постоянного момента.
Со схемы видно, что в статоре ток образуется в обмотках, а в роторе создается при помощи высокоэнергетических постоянных магнитов. Условные обозначения: — VT1-VT7 — транзисторные коммуникаторы; — A, B, C – фазы обмоток; — M – момент двигателя; — DR – датчик положения ротора; — U – регулятор напряжения питания двигателя; — S (south), N (north) – направление магнита; — UZ – частотный преобразователь; — BR – датчик частоты вращения; — VD – стабилитрон; — L – катушка индуктивности.
Схема двигателя показывает, что одним из основных преимуществ ротора, в котором установлены постоянные магниты, является уменьшение его диаметра и, как следствие, сокращение момента инерции. Такие приспособления могут быть встроенными в сам прибор или расположенными на его поверхности. Понижение этого показателя очень часто приводит к небольшим значениям баланса момента инерции самого двигателя и приведенного к его валу нагрузки, который и усложняет работу привода. По этой причине производители могут предложить стандартный и повышенный в 2-4 раза момент инерции.
Датчики положения и дополнительные устройства
В качестве датчика положения, необходимого для коммутации вентильного двигателя, могут быть использованы датчики Холла (цифровые или аналоговые), энкодер (цифровой, аналоговый или абсолютный) или резольвер.
Цифровые датчики Холла используются для наиболее распространенной – трапецеидальной коммутации вентильного двигателя. Цифровые датчики Холла могут быть выполнены также и на оптической шкале энкодера.Аналоговые датчики Холла используются для синусоидальной коммутации вентильного двигателя.
Энкодер имеет три дифференциальных канала – два канала А, В прямоугольных импульсов, сдвинутых на 90 электрических градусов, и нулевой импульс I (индекс). Резольвер представляет собой вращающийся трансформатор с обмоткой возбуждения и двумя выходными обмотками со сдвигом 90 электрических градусов.
Аналоговый энкодер имеет аналоговые sin/cos (1В между пиками peaktopeak) дифференциальные выходы.
Внешний интерполятор позволяет повысить исходное разрешение с коэффициентом умножения до 4096 .Абсолютный энкодер передает информацию по положению по синхронному последовательному интерфейсу (SSI или BiSS), протокол которого задается производителем энкодера. Одними из наиболее популярных протоколов являются Heidenhain EnDat, Tamagawa Smart Abs и Stegman Hiperface протоколы.
Кроме датчика положения дополнительно могут быть встроены: тахогенератор, термодатчик, тормоз или редуктор.
Тахогенератор применяется в случае использования вентильного двигателя в режиме регулирования/стабилизации скорости с высокой точностью.
Термодатчик для защиты обмоток от перегрева представляет собой несколько последовательно соединенных позисторов, т.е. терморезисторов с положительным температурным коэффициентом (positive temperature coefficient РТС).
Принципы работы
На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Способы коммутации с применением датчика положения ротора
Способы коммутации вентильного двигателя различаются по типу датчика положения ротора и особенностям регулирования тока в фазах обмоток статора.
3.1. Трапецеидальная или шестишаговая (sixstep) коммутация вентильного двигателя осуществляется по цифровым датчикам Холла. Для 3х датчиков Холла, являющихся «грубым» датчиком положения ротора, возможных состояний на полный электрический оборот будет шесть, каждое из которых соответствует 60 электрическим градусам. При каждом постоянном состоянии датчиков Холла подключаются только две обмотки двигателя, а третья отключена от источника напряжения. Постоянство вектора тока в пределах ±30 электрических градусов от оптимального (создающего максимальный момент) приводит к 17% пульсациям тока.
Преимущества:
- готовность к работе при включении питания;
- дешевый усилитель тока;
- управление током (моментом) аналоговым сигналом ±10В.
Недостатки:
- пульсации тока;
- средние показатели быстродействия при позиционировании и равномерности при сканировании.
Область применения: регулирование скорости при невысоких требованиях к эффективности и равномерности перемещения на низких скоростях.
3.2. Синусоидальная коммутация лишена недостатков трапецеидальной коммутации за счет непрерывной и плавной коммутации вектора тока. Это достигается благодаря более высокому разрешению датчика положения ротора (обычно инкрементального энкодера) по сравнению с цифровыми датчиками Холла, имеющими разрешение только 60 электрических градусов. Для стандартного двигателя с соединением фаз в «звезду» достаточно контролировать ток в двух обмотках с помощью двух регуляторов на базе ПИрегуляторов. Такой способ коммутации очень эффективен на малых и средних скоростях, но имеет ошибки на высоких скоростях. В этом случае изза ограниченного усиления ПИрегулятора при заданном напряжении постоянного напряжения (DC bus) мах скорость ограничена. Несколько повысить скорость позволяет метод сдвиг фазы (phase advance).
Преимущества:
- минимальные пульсации тока;
- высокие показатели быстродействия при позиционировании и равномерности при сканировании.
Недостатки:
ограничение мах скорости при заданном напряжении постоянного напряжения;
управление током (моментом/силой) при помощи двух аналоговых сигналов ±10В.
Область применения: прецизионные механизмы.
3.3. Непосредственно векторный контроль тока в координатах DQ использует преобразования между статическими DQ и вращающими UVW координатами вектора тока, известными как преобразования ПаркаКларка. В отличие от синусоидальной такой способ коммутации предполагает работу ПИрегулятора с напряжениями постоянного тока, а не синусоидальными напряжениями. Это и обеспечивает качество управления током, независимое от скорости вращения двигателя.
Векторный контроль предполагает регулирование квадратичной (D) и прямой (Q) составляющих тока. Т.к. только прямая (Q) составляющая тока, перпендикулярная к полю ротора, создает момент двигателя, то задание тока подается на вход прямой (Q) составляющей тока. На вход квадратичной (D) составляющей тока подается «0» сигнал.
Преобразования между статическими DQ и вращающими UVW координатами вектора тока производятся с учетом токов фаз и положения ротора.
Векторный контроль при наличии преимуществ синусоидальной коммутации позволяет расширить диапазон скоростей вентильного двигателя за счет более полного использования напряжения постоянного тока.
Следует отметить, что для синусоидальной или векторной коммутации тока при использовании инкрементального (относительного) датчика положения ротора необходимо первоначально (т.е. при каждом включении питания) сфазировать положение ротора относительно фаз статора. Алгоритм такой начальной фазировки обычно является «встроенным».
Трапецеидальная коммутация вентильного двигателя не требует начальной фазировки благодаря использованию датчиков Холла, являющихся абсолютными датчиками положения ротора. Поэтому их иногда применяют вместе с инкрементальным датчиком положения для реализации синусоидальной или векторной коммутации тока без необходимости производить начальную фазировку. Такая конфигурация рекомендуется для механизмов, где реализация процедуры начальной фазировки затруднена, например, механизмов вертикального перемещения.
Преимущества
Применяя вентильный двигатель в работе, можно отметить такие его достоинства:
— возможность применения широкого диапазона для модифицирования частоты вращения;
— высокая динамика и быстродействие;
— максимальная точность позиционирования;
— небольшие затраты на техническое обслуживание;
— устройство можно отнести к взрывозащищенным объектам;
— имеет способность переносить большие перегрузки в момент вращения;
— высокий КПД, который составляет более 90%;
— имеются скользящие электронные контакты, которые существенно увеличивают рабочий ресурс и срок службы;
— при длительной работе нет перегрева электродвигателя.
Технические характеристики
При выборе конкретной модели важно определить ее соответствие месту установки, поэтому важно обращать внимание на следующие характеристики вентильных двигателей:
- номинальное напряжение – определяет питающую величину, которая должна подаваться на вентильный двигатель для получения номинального усилия;
- потребляемая мощность – характеристика электродвигателя, показывающая величину мощности, расходуемую на работу устройства;
- КПД – показывает соотношение полезной работы, совершаемой вентильным двигателем к израсходованной мощности;
- мощность на валу – полезная работа электрической машины, совершаемая за счет тягового усилия;
- номинальная частота – определяет количество оборотов в минуту, которые вентильный двигатель может совершать в номинальном режиме работы;
- диапазон регулировки частоты – показывает, в каких пределах можно изменять частоту оборотов вала для конкретной модели;
- номинальный крутящий момент – определяет усилие, создаваемое на валу вентильного двигателя при оптимальных параметрах работы, также в параметрах может регламентироваться пусковой и максимальный момент;
- коэффициент нагрузки – показывает, насколько снижается эффективность электрической машины, в зависимости от подъема над уровнем моря;
- габаритные размеры и масса вентильного двигателя.
Вентильный индукторный двигатель
Вентильно-индукторный двигатель – это устройство, в котором предусмотрено переключающееся магнитное сопротивление. В нем преобразование энергии происходит за счет изменения индуктивности обмоток, которые располагаются на явно выраженных зубцах статора при передвижении зубчатого магнитного ротора. Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора.
Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
Свойства двигателя
Такие устройства обладают высокой динамикой, большой перегрузочной способностью и точным позиционированием. Благодаря тому что в них отсутствуют движущие части, их использование возможно во взрывоопасной агрессивной среде. Такие моторы также называют и бесколлекторными, их основным преимуществом, по сравнению с коллекторными, является скорость, которая зависит от напряжения питания нагружающего момента. Также еще одним немаловажным свойством считается отсутствие истираемых и трущихся элементов, которые переключают контакты, благодаря чему вырастает ресурс пользования аппаратом.
Вентильные двигатели постоянного тока
Все двигатели постоянного тока можно назвать бесколлекторными. Они работают от сети с постоянным током. Щеточный узел предусмотрен для электрического объединения цепей ротора и статора. Такая деталь является самой уязвимой и достаточно сложной в обслуживании и ремонте.
Вентильный двигатель постоянного тока работает по тому же принципу, что и все синхронные устройства такого типа. Он представляет собой замкнутую систему, включающую силовой полупроводниковый преобразователь, датчик положения ротора и координатор.
Бесколлекторник своими руками
@@Конструктивные особенности CD-ROM движков очень разные. Поэтому в этой статье даются общие рекомендации по переделке таких двигателей с минимальными затратами в 3 фазные авиамодельные двигатели.
@@Требования к CD-ROM движкам (данные приведены для двигателей, которые реально переделывались):
- Число зубцов (полюсов) ротора должно быть равным 9
- Количество устанавливаемых заново магнитов — 12
- Диаметр ротора: 28.5 мм
- Высота ротора: 7.8 мм
- Диаметр оси: 3 мм
- Длина оси: 6.8 мм
- Диаметр статора: 24 мм
- Высота статора: 5.2 мм
- Вес переделанного двигателя — 21 г
- Тип намотки — дельта
- Намотка проводом диаметром — 0,4-0,5 (желательно ПЭТВ)
- Количество витков — 17-20 на зуб
@@Используемые клеи: «111», фиксаторы резьбы (продаются в автомагазинах). @@Используемая эпоксидная смола: любая не российская и не 5-минутка.
Подготовительные работы
@@На внутренней стороне ротора приклеено намагниченное пластмассовое кольцо. Аккуратно удалите его. Это можно сделать следующим образом: согнутый и нагретый гвоздь вводится в пластмассу. Даем ему остыть, и осторожно вытягиваем пластмассовое кольцо
@@Статор отсоединяем от пластины, на которой он крепится (вариантов крепления очень много и поэтому я не привожу технологию — в каждом конкретном случае решайте сами как это сделать). Отсоединения статора, аккуратно удаляем с него намотку, Стараемся не повредить заводскую лакировку.
Перемотка
@@Перемотку статора ведут медным проводом, диаметром 0.4mm — 0.5mm. На каждый полюс мотаем от 17 до 20 витков.
@@Чем меньше витков, тем больше обороты, большее количество витков позволяет получить более высокий вращающийся момент. Изоляция провода должна остаться неповрежденной — это критично, иначе ваш двигатель не будет работать.
@@Вы можете выбрать между типом намотки «дельты» и «звезда». С намоткой «звезда» двигатель будет иметь более высокий вращающий момент, меньше оборотов в минуту и будет «есть» меньше. Намотка «дельта» даст «более горячий» двигатель с более высокими оборотами в минуту и большим КПД, но будет иметь больший «аппетит» и будет греться больше. Намотка «звезда» «тяжелее» для работы контроллера.
Проверка качества
@@Проверка качество намотки производится мультиметром. Провод НЕ ДОЛЖЕН быть сломан или с поврежденной изоляцией. Сопротивление обмоток должно быть примерно одинаковым. Провода обмотки не должны быть закорочены между собой или на статор (в случае повреждения изоляции). Если вы не уверены, что нет повреждений или «коротыша» — снимайте намотанный провод и мотайте еще раз. Соедините, закрепите и пропаяйте выводы обмоток. Сопротивление обмоток ~ 0,1-0,14 ом на фазу.
Установка новых магнитов в ротор
@@ОЧЕНЬ ВАЖНО — магниты должны быть установлены с соблюдением полярности — N-S-N-S …, иначе ваш двигатель не будет работать. Хороший способ проверять полярность состоит в том, чтобы разместить 12 магнитов на столе в один ряд, в таком же порядке приклеивать магниты в стакан ротора. Для приклеивания используйте высококачественный клей (не используйте эпоксидную смолу 5-минутку).
@@Добейтесь равномерного размещения магнитов в стакане ротора. Как можно это сделать: устанавливая магниты в стакан, прокладывайте их тонкими кусочками бумаги одинаковой толщины, если один из зазоров получился больше, то увеличьте толщину бумаги. Расстояние между магнитами должно быть одинаковым. Не пожалейте времени, чтобы сделать эту работу. После установки магнитов и их приклейки, заполните промежутки между ними эпоксидной смолой. Будьте осторожны, не перелейте смолы.
Испытание
@@Трения между ротором и магнитами не должно быть. Если движение при проворачивании без значительного усилия и толчков, то можете пробовать запускать собранный двигатель.
@@ВЫ МОЖЕТЕ изменить направление вращения, меняя 2 из этих 3 контактов между двигателем и контроллером.
@@Готовые моторы.
Авторам опубликованных статей предоставляются скидки в нашем магазине
Дата: Вторник, 08 Октября 2013
Синхронные и асинхронные вентильные двигатели постоянного тока широко применяются в различных сферах промышленного производства. В рамках этой статьи мы подробно рассмотрим их устройство и принцип работы.
Вентильные двигатели переменного тока
Такие устройства получают свое питание от сетей переменного тока. Скорость вращения ротора и движения первой гармоники магнитной силы статора полностью совпадают. Данный подтип двигателей можно использовать при высоких мощностях. К этой группе относятся шаговые и реактивные вентильные аппараты. Отличительной особенностью шаговых устройств является дискретное угловое смещение ротора при его работе. Питание обмоток формируется при помощи полупроводниковых компонентов. Управление вентильным двигателем осуществляется при последовательном смещении ротора, которое и создает переключение его питания с одних обмоток на другие. Это устройство можно разделить на одно-, трех- и многофазные, первые из которых могут содержать пусковую обмотку или фазосдвигающую цепь, а также запускаться вручную.
Система управления
Если электромеханическая часть состоит преимущественно из трех компонентов, в числе которых ротор, статор и несущая конструкция в виде корпуса, то управляющая инфраструктура более сегментирована – количество элементов может достигать нескольких десятков. Другое дело, что их можно поделить на виды. В единственном числе будет представлен только инвертор. Он отвечает за функции коммутации, осуществляя подключение и переключение фаз. Основные же задачи контроля с подачей сигналов выполняют датчики. Главным из них является детектор положения ротора. Кроме этого, в состав управляющего блока вводится и система регуляции сигналов. Это узел с ключами, посредством которого реализуется связь датчиков и электромеханической начинки.
Информацию о позиции ротора обрабатывает микропроцессор. Внешне интерфейс этого блока представляет собой панель управления. На приеме она работает с сигналами широтно-импульсной модуляции (ШИМ-сигнал). Если предусматривается подача низковольтных сигналов, то в управляющем блоке устанавливается и транзисторный мост. Он преобразует сигнал в силовое напряжение, которое в дальнейшем подается на электродвигатель. Наличие датчиков с системой обработки импульсов как раз и отличает управление вентильным двигателем от средств контроля щеточно-коллекторных агрегатов. Другое дело, что возможность внедрения электронной аппаратуры с датчиками допускается и в коллекторных машинах наряду с механическими системами управления.
Принцип работы синхронного двигателя
Вентильный синхронный двигатель работает на основе взаимодействия магнитных полей ротора и статора. Схематически магнитное поле при вращении можно изобразить плюсами этих же магнитов, которые движутся со скоростью магнитного поля статора. Поле ротора также возможно изобразить как постоянный магнит, который делает обороты синхронно с полем статора. В случае отсутствия внешнего вращающего момента, который прикладывается к валу аппарата, оси полностью совпадают. Воздействующие силы притяжения проходят вдоль всей оси полюсов и могут компенсировать друг друга. Угол между ними приравнивается к нулю.
В случае если на вал машины будет воздействовать тормозной момент, то ротор перемещается в сторону с запаздыванием. Благодаря этому силы притяжения разбиваются на составляющие, которые направляются вдоль оси плюсовых показателей и перпендикулярно к оси полюсов. Если будет прикладываться внешний момент, который создает ускорение, то есть начинает действовать по направлению вращения вала, картинка по взаимодействию полей полностью изменится на обратную. Направленность углового смещения начинает трансформироваться на противоположное, и в связи с этим меняется направление тангенциальных сил и воздействие электромагнитного момента. При таком раскладе двигатель становится тормозным, а аппарат работает как генератор, который подводимую к валу механическую энергию преобразует в электрическую. Далее она перенаправляется в сеть, питающую статор.
Когда будет отсутствовать внешний, явнополюсный момент начнет принимать положение, при котором ось полюсов магнитного поля статора будет совпадать с продольной. Это размещение станет соответствовать минимальному сопротивлению потока в статоре.
В случае воздействия на вал машины тормозного момента ротор отклонится, при этом магнитное поле статора будет деформированным, так как поток стремится замкнуться по наименьшему сопротивлению. Для его определения необходимы силовые линии, направленность которых в каждой из точек будет соответствовать движению действия силы, поэтому изменение поля приведет к появлению тангенциального взаимодействия.
Рассмотрев все эти процессы в синхронных двигателях, можно выявить демонстративный принцип обратимости разнообразных машин, то есть возможность любого электрического аппарата изменить направленность преобразованной энергии на противоположную.
Асинхронные электродвигатели
Асинхронные электрические машины смело можно назвать костяком современной промышленности. Благодаря своей простоте, относительно низкой стоимости, минимальным затратам на обслуживание, а также возможности работать напрямую от промышленных сетей переменного тока, они прочно въелись в современные производственные процессы.
Сегодня существует множество различных преобразователей частоты с самыми различными алгоритмами управления, которые позволяют регулировать скорость и момент асинхронной машины в большом диапазоне с хорошей точностью. Все эти свойства позволили асинхронной машине значительно потеснить с рынка традиционные коллекторные двигатели. Вот почему регулируемые асинхронные электродвигатели (АД) легко встретить в самых различных устройствах и механизмах, таких как тяговый асинхронный электропривод, электроприводы стиральных машин, вентиляторов, компрессоров, воздуходувок, кранов, лифтов и многом другом электрооборудовании.
АД создает вращающий момент за счет взаимодействия тока статора с индуцированным током ротора. Но токи ротора нагревают его, что приводит к нагреванию подшипников и снижению их срока службы. Замена традиционной алюминиевой обмотки на медную не устраняет проблему, а приводит к удорожанию электрической машины и может накладывать ограничения на прямой ее пуск.
Статор асинхронной машины имеет довольно большую постоянную времени, что негативно сказывается на реагировании системы управления при изменении скорости или нагрузки. К сожалению, потери связанные с намагничиванием не зависят от нагрузки машины, что снижает КПД АД при работе с малыми нагрузками. Автоматическое уменьшение потока статора возможно использовать для решения данной проблемы — для этого необходим быстрый отклик системы управления на изменения нагрузки, но как показывает практика, такая коррекция не существенно увеличивает КПД.
На скоростях превышающих номинальную поле статора ослабевает из-за ограниченного напряжения питания. Вращающий момент начинает падать, так как для его поддержания будет требоваться больший ток ротора. Следовательно, управляемые АД ограничиваются диапазоном скорости для поддержания постоянной мощности примерно 2:1.
Механизмы, которые требуют более широкого диапазона регулирования, такие как: станки с ЧПУ, тяговый электропривод, могут снабжаться асинхронными электродвигателями специального исполнения, где для увеличения диапазона регулирования могут уменьшать количество витков обмотки, снижая при этом значения крутящего момента на низких скоростях. Также возможен вариант с использованием более высоких токов статора, что требует установки более дорогих и менее эффективных инверторов.
Немаловажным фактором при работе АД является качество питающего напряжения, ведь максимальный КПД электродвигатель имеет при синусоидальной форме питающего напряжения. В реальности преобразователь частоты обеспечивает импульсное напряжение и ток, похожий на синусоидальный. Проектировщикам стоит иметь ввиду, что КПД системы ПЧ-АД будет меньше, чем сумма КПД преобразователя и двигателя в отдельности. Улучшения качества выходного тока и напряжения повышают увеличением несущей частоты преобразователя, это приводит к снижению потерь в двигателе, но при этом возрастают потери в самом инверторе. Одним из популярных решений, особенно для промышленных мощных электроприводов, является установка фильтров между преобразователем частоты и асинхронной машиной. Однако это приводит к увеличению стоимости, габаритов установки, а также к дополнительным потерям мощности.
Еще одним недостатком асинхронных машин переменного тока является то, что их обмотки распределены на протяжении многих пазов в сердечнике статора. Это приводит к появлению длинных концевых поворотов, которые увеличивают габариты и потери энергии в машине. Эти вопросы исключены в стандартах IE4 или классах IE4. В настоящее время европейский стандарт (IEC60034) специально исключает любые двигатели, требующие электронного управления.
Бесколлекторные двигатели с постоянными магнитами
Вентильный двигатель с постоянными магнитами используется для решения серьезных оборонных и промышленных задач, так как такое устройство имеет большой запас мощности и эффективности.
Эти приборы чаще всего применяются в отраслях, где необходимы сравнительно низкие потребляющие мощности и небольшие габариты. Они могут иметь самые разные габариты, без технологических ограничений. В то же время большие аппараты не являются совершенно новыми, их чаще всего производят компании, которые стремятся преодолеть экономические трудности, ограничивающие ассортимент этих приборов. У них есть свои преимущества, среди которых можно отметить высокую эффективность из-за потерь в роторе и большую плотность мощности. Для управления бесколлекторными двигателями нужен частотно-регулируемый привод.
Анализ по затратам и результатам показывает, что устройства с постоянными магнитами намного предпочтительнее, по сравнению с другими, альтернативными технологиями. Чаще всего они используются для отраслей промышленности с достаточно тяжелым распорядком работы судовых двигателей, в военной и оборонной отрасли и других подразделениях, число которых непрерывно возрастает.
Конструкция
Статор
Ротор
В зависимости от количества магнитов, расположенных в поперечном сечении ротора двигатель будет иметь то или иное количество полюсов.
В погружных вентильных электродвигателях используемых в нефтяной отрасли ротор содержит постоянные магниты. Как правило погружные ВД выпускаются 8-ми и 4-х полюсными.
При одной и той же частоте вращения электромагнитного поля статора, частота вращения вентильного электродвигателя с большим количеством пар полюсов будет меньше. Так, если скорость вращения 8-ми полюсного электродвигателя 1500 об/мин, то 4-х полюсный при той же частоте поля будет вращаться с частотой 3000 об/мин.
Реактивный двигатель
Вентильно-реактивный двигатель работает с использованием двухфазных обмоток, которые установлены вокруг диаметрально противоположных полюсов статора. Подача питания продвигается к ротору в соответствии с полюсами. Таким образом, его противодействие полностью сводится к минимуму.
Вентильный двигатель, своими руками созданный, обеспечивает высокоэффективную скорость привода при оптимизированном магнетизме для работы с реверсом. Информация о месторасположении ротора используется для того, чтобы управлять фазами подачи напряжения, так как это является оптимальным для достижения непрерывного и плавного крутящего момента и высокой эффективности.
Сигналы, которые выдает реактивный двигатель, накладываются на угловую ненасыщенную фазу индуктивности. Минимальное сопротивление полюса полностью соответствует максимальной индуктивности устройства.
Положительный момент можно получить только при углах, когда показатели позитивные. На небольших скоростях фазный ток обязательно должен быть ограниченным, чтобы произвести защиту электроники от высоких вольт-секунд. Механизм преобразования можно иллюстрировать линией реактивной энергии. Мощностная сфера характеризует собой питание, которое преобразовывается в механическую энергию. В случае его резкого отключения избыточная или остаточная сила возвращается к статору. Минимальные показатели влияния магнитного поля на производительность устройства являются основным его отличием от похожих устройств.
Виды устройства
Вентильные двигатели могут работать от переменного или постоянного тока. Помимо этого, их принято делить на следующие виды:
- Однофазное устройство. Это простейшие вентильные двигатели с наименьшим количеством связей между машиной и электроникой. К числу недостатков однофазных устройств следует отнести: пульсации, высокий крутящий момент, а также невозможность запуска на всех угловых положениях. Однофазные двигатели нашли широкое применение в машинах, где требуется высокая скорость.
- Двухфазный двигатель. Этот мотор при работе активизирует воздушный зазор либо, при дополнительной настройке, создает асимметрию в полюсах ротора. Это устройство устанавливается в машинах, где критична связь статора с обмоткой. К числу недостатков следует отнести высокий крутящий момент и пульсации, которые могут привести к пагубным последствиям.
- Трехфазный двигатель. Этот дисковый двигатель используется для запуска и создания крутящего момента, не используя при этом большого количества фаз. Данный тип двигателей используется в различных отраслях производства, а иногда и в бытовых условиях. Это самая популярная конструкция из всех представленных. Альтернативные 3-фазные машины с четным числом полюсов являются лучшим решением для приборов, где необходимо сочетание высокой мощности и низкой скорости, например, в насосах. Недостатки трехфазных двигателей: высокий крутящий моментом и повышенный уровень шума.
- Устройства с четырьмя фазами. У этих двигателей существенно снижен крутящий момент и пульсации, но сфера применения устройств ограничена высокой стоимостью и большой мощностью.
К сожалению, разработать и создать своими руками рабочий погружной или многофазный вентильный двигатель практически невозможно, намного проще купить нужную модель. В разных городах России и Украины цена вентильных двигателей может значительно варьироваться. Нижняя ступень будет около 8000 тысяч рублей, верхняя может достигать 20 000, в зависимости от области действия и производителя
Во многих сферах производства используются вентильные двигатели, в частности, на нефтяных скважинах, буровых установках, приводобежных механизмах, системах охлаждения воздуха на химических предприятиях.