«Импульсы в секунду» перенаправляются сюда. Не следует путать с Импульсный сигнал.
В частота следования импульсов
(
PRF
) — количество импульсов повторяющегося сигнала в определенной единице времени, обычно измеряемое в
импульсов в секунду
. Этот термин используется в ряде технических дисциплин, в частности радар.
В радаре — радиосигнал определенного несущая частота включается и выключается; термин «частота» относится к несущей, в то время как PRF относится к количеству переключателей. Оба измеряются с точки зрения цикл в секунду, или же герц. PRF обычно намного ниже, чем частота. Например, типичный Вторая Мировая Война радар как у Type 7 Радар GCI имел базовую несущую частоту 209 МГц (209 миллионов циклов в секунду) и частоту повторения импульсов 300 или 500 импульсов в секунду. Связанная мера — это ширина импульса, количество времени, в течение которого передатчик включен во время каждого импульса.
PRF — одна из определяющих характеристик радиолокационной системы, которая обычно состоит из мощного передатчика и чувствительного приемника, подключенных к одной антенне. После создания короткого импульса радиосигнала передатчик выключается, чтобы приемные устройства слышали отражения этого сигнала от удаленных целей. Поскольку радиосигнал должен идти к цели и обратно, требуемый период молчания между импульсами является функцией желаемой дальности действия радара. Для сигналов большего диапазона требуются более длительные периоды, требующие более низких значений PRF. И наоборот, более высокие частоты повторения импульсов производят более короткие максимальные дальности, но передают больше импульсов и, следовательно, радиоэнергии в заданное время. Это создает более сильные отражения, облегчающие обнаружение. Радиолокационные системы должны уравновешивать эти два конкурирующих требования.
Используя старую электронику, PRF обычно фиксировались на определенном значении или могли переключаться между ограниченным набором возможных значений. Это дает каждой радиолокационной системе характеристическую частоту повторения импульсов, которую можно использовать в радиоэлектронная борьба для определения типа или класса конкретной платформы, такой как корабль или самолет, или, в некоторых случаях, конкретной единицы. Приемники радиолокационных предупреждений в самолет включает библиотеку общих PRF, которые могут идентифицировать не только тип радара, но в некоторых случаях режим работы. Это позволяло предупреждать пилотов, когда ЗРК СА-2 батарея, например, «заблокирована». Современные радиолокационные системы обычно могут плавно изменять свою частоту повторения импульсов, ширину импульса и несущую частоту, что значительно затрудняет идентификацию.
Сонар и лидар системы также имеют PRF, как и любая импульсная система. В случае с гидролокатором термин частота следования импульсов
(
PRR
) встречается чаще, хотя относится к той же концепции.
Определение
Частота повторения импульсов (PRF) — это количество раз, когда импульсная активность происходит каждую секунду.
Это похоже на цикл в секунду используется для описания других типов сигналов.
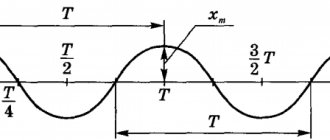
PRF обратно пропорционален периоду времени. Т { displaystyle mathrm {T}} что является свойством импульсной волны.
Т = 1 PRF { displaystyle mathrm {T} = { frac {1} { text {PRF}}}}
PRF обычно связана с интервалом между импульсами, который представляет собой расстояние, которое проходит импульс до появления следующего импульса.
Интервал между импульсами = Скорость распространения PRF { displaystyle { text {Интервал между импульсами}} = { frac { text {Скорость распространения}} { text {PRF}}}}
Видео
RS триггер
Кофе капсульный Nescafe Dolce Gusto Капучино, 3 упаковки по 16 капсул
1305 ₽ Подробнее
Кофе в капсулах Nescafe Dolce Gusto Cappuccino, 8 порций (16 капсул)
435 ₽ Подробнее
Hi-Res плееры
Физика
PRF имеет решающее значение для выполнения измерений определенных физических явлений.
Например, тахометр может использовать импульсная лампа с регулируемым PRF для измерения скорости вращения. PRF для стробоскопа регулируется в сторону увеличения от низкого значения до тех пор, пока вращающийся объект не будет казаться неподвижным. Тогда PRF тахометра будет соответствовать скорости вращающегося объекта.
Другие типы измерений включают расстояние с использованием времени задержки для отраженных эхо-импульсов от света, микроволн и передачи звука.
Характеристики импульсов
Форма импульсов
Электрический котел для отопления частного дома как устроен котел электрический, способы монтажа
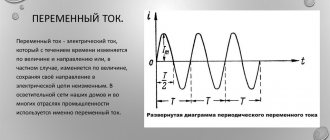
Важной характеристикой импульсов является их форма, визуально наблюдать которую, можно, например, на экране осциллографа. В общем случае форма импульсов имеет следующие составляющие: фронт — начальный подъём, относительно плоская вершина (не для всех форм) и срез (спад) — конечный спад напряжения
Существует несколько типов импульсов стандартных форм, имеющих относительно простое математическое описание, такие импульсы широко применяются в технике
- Прямоугольные импульсы — наиболее распространённый тип
- Пилообразные импульсы
- Треугольные импульсы
- Трапецеидальные импульсы
- Экспоненциальные импульсы
- Колокольные (колоколообразные) импульсы
- Импульсы, представляющие собой полуволны или другие фрагменты синусоиды (обрезка по горизонтали или по вертикали)
Кроме импульсов стандартной, простой формы иногда, в особых случаях, используются импульсы специальной формы, описываемой сложной функцией, существуют также сложные импульсы, форма которых имеет в значительной степени случайный характер, например, импульсы видеосигнала.
Параметры импульсов
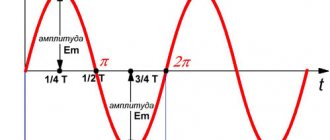
В общем случае импульсы характеризуются двумя основными параметрами — амплитудой (размахом — разностью напряжений между пьедесталом и вершиной импульса) и длительностью (обозначается τ
или
tи)
. Длительность пилообразных и треугольных импульсов определяется по основанию (от начала изменения напряжения до конца), для остальных типов импульсов длительность принято брать на уровне напряжения 50 % от амплитуды, для колоколообразных импульсов иногда используется уровень 10 %, длительность искусственно синтезированных колоколообразных импульсов (с чётко выраженным основанием) и полуволн синусоиды часто измеряется по основанию.
Выброс на вершине прямоугольного импульса
Для разных типов импульсов также вводят дополнительные параметры, уточняющие форму или характеризующие степень её неидеальности — отклонения от идеальной. Например, для описания неидеальности прямоугольных импульсов используются такие параметры, как, (для идеального прямоугольного импульса они равны нулю), неравномерность вершины, а также размер выбросов напряжения после фронта и среза, возникающих в результате переходных паразитных процессов.
Спектральное представление импульсов
Кроме временного представления импульсов, наблюдаемого по осциллографу, существует спектральное представление, выраженное в виде двух функций — амплитудного и фазового спектра.
Спектр одиночного импульса является непрерывным и бесконечным. Амплитудный спектр прямоугольного импульса имеет чётко выраженные минимумы по шкале частот, следующие с интервалом, обратным длительности импульса.
Измерение
PRF имеет решающее значение для систем и устройств, измеряющих расстояние.
- Радар
- Лазерный дальномер
- Сонар
Различные PRF позволяют системам выполнять очень разные функции.
Радиолокационная система использует радиочастотный электромагнитный сигнал, отраженный от цели, для определения информации об этой цели.
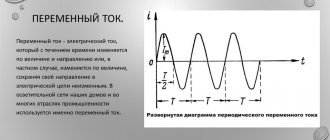
PRF требуется для радар операция. Это скорость, с которой импульсы передатчика отправляются в воздух или космос.
Неопределенность диапазона
Реальная цель на 100 км или эхосигнал второй развертки на расстоянии 400 км
Радиолокационная система определяет дальность действия через временную задержку между передачей и приемом импульса по соотношению:
Классифицировать = c τ 2 { displaystyle { text {Range}} = { frac {c tau} {2}}}
Для точного определения дальности импульс должен быть передан и отражен до того, как будет передан следующий импульс. Это приводит к максимальному однозначному пределу диапазона:
Максимальный диапазон = c τ PRT 2 = c 2 PRF { τ PRT = 1 PRF { displaystyle { text {Max Range}} = { frac {c tau _ { text {PRT}}} {2}} = { frac {c} {2 , { text {PRF}} }} qquad { begin {cases} tau _ { text {PRT}} = { frac {1} { text {PRF}}} end {cases}}}
Максимальная дальность также определяет неопределенность дальности для всех обнаруженных целей. Из-за периодической природы импульсных радиолокационных систем для некоторых радиолокационных систем невозможно определить разницу между целями, разделенными целыми кратными максимальной дальности, с использованием одного PRF. Более сложные радиолокационные системы позволяют избежать этой проблемы за счет использования нескольких PRF одновременно на разных частотах или на одной частоте с изменяющимся PRT.
В процесс разрешения неоднозначности диапазона используется для определения истинного диапазона, когда PRF выше этого предела.
Низкий PRF
Системы, использующие PRF ниже 3 кГц, считаются низкой PRF, потому что прямая дальность действия может быть измерена на расстоянии не менее 50 км. Радиолокационные системы, использующие низкий PRF, обычно дают однозначную дальность.
Однозначная доплеровская обработка становится все более сложной задачей из-за ограничений когерентности, поскольку частота повторения импульсов падает ниже 3 кГц.
Например, L-диапазон радар с частотой следования импульсов 500 Гц производит неоднозначная скорость выше 75 м / с (170 миль / час), при обнаружении истинной дальности до 300 км. Эта комбинация подходит для радаров гражданских самолетов и метеорологический радар.
Дальность 300 км = C 2 × 500 { displaystyle { text {300 км}} = { frac {C} {2 times 500}}} Скорость 75 м / с = 500 × C 2 × 10 9 { displaystyle { text {скорость 75 м / с}} = { frac {500 times C} {2 times 10 ^ {9}}}}
РЛС с низкой частотой повторения импульсов имеют пониженную чувствительность при наличии низкоскоростных помех, которые мешают обнаружению самолетов вблизи местности. Индикатор подвижной цели обычно требуется для приемлемой работы вблизи местности, но это вводит радиолокационный гребешок проблемы, усложняющие приемник. Радиолокаторы с низкой частотой повторения импульсов, предназначенные для обнаружения самолетов и космических аппаратов, сильно страдают от погодных явлений, которые нельзя компенсировать с помощью индикатора движущейся цели.
Средняя PRF
Дальность и скорость можно определить с помощью средней частоты повторения импульсов, но ни один из них не может быть идентифицирован напрямую. Средний PRF составляет от 3 кГц до 30 кГц, что соответствует дальности действия радара от 5 до 50 км. Это неоднозначный диапазон, который намного меньше максимального диапазона. Разрешение неоднозначности диапазона используется для определения истинной дальности в радаре со средней частотой повторения импульсов.
Средняя PRF используется с Импульсно-доплеровский радар, что требуется для смотреть вниз / сбивать возможности в военных системах. Возвращение доплеровского радара обычно не является неоднозначным до тех пор, пока скорость не превысит скорость звука.
Техника называется разрешение неоднозначности требуется для определения истинной дальности и скорости. Доплеровские сигналы находятся в диапазоне от 1,5 кГц до 15 кГц, что является слышимым, поэтому аудиосигналы от радиолокационных систем со средней частотой повторения импульсов могут использоваться для пассивной классификации целей.
Например, L группа Радиолокационная система, использующая частоту повторения импульсов 10 кГц с рабочим циклом 3,3%, может определять истинную дальность до 450 км (30 * C / 10 000 км / с). Это приборный диапазон
. Однозначная скорость составляет 1500 м / с (3300 миль / час).
450 км = C 0.033 × 2 × 10 , 000 { displaystyle { text {450 км}} = { frac {C} {0,033 times 2 times 10 000}}} 1500 м / с = 10 , 000 × C 2 × 10 9 { displaystyle { text {1 500 м / с}} = { frac {10 000 times C} {2 times 10 ^ {9}}}}
Однозначная скорость L-диапазон радар, использующий частоту повторения импульсов 10 кГц, составит 1500 м / с (3300 миль / час) (10000 x C / (2 x 10 ^ 9)). Истинная скорость может быть найдена для объектов, движущихся со скоростью менее 45 000 м / с, если полосовой фильтр пропускает сигнал (1 500 / 0,033).
Средняя PRF обладает уникальными радиолокационный гребешок проблемы, требующие избыточных схем обнаружения.
Высокий PRF
Системы, использующие PRF на частотах выше 30 кГц, работают, более известные как радары с непрерывной непрерывной волной (ICW), поскольку прямая скорость может быть измерена до 4,5 км / с при L группа, но разрешение диапазона становится более трудным.
Высокая частота повторения импульсов ограничена системами, требующими работы вблизи, такими как бесконтактные предохранители и радар правоохранительных органов.
Например, если во время фазы покоя между импульсами передачи отобрано 30 выборок с использованием PRF 30 кГц, то истинный диапазон может быть определен максимум до 150 км с использованием 1 микросекундных выборок (30 x C / 30 000 км / с). Отражатели за пределами этого диапазона могут быть обнаружены, но истинный диапазон не может быть идентифицирован.
150 км = 30 × C 2 × 30 , 000 { displaystyle { text {150 км}} = { frac {30 times C} {2 times 30 000}}} 4500 м / с = 30 , 000 × C 2 × 10 9 { displaystyle { text {4500 м / с}} = { frac {30 000 times C} {2 times 10 ^ {9}}}}
Становится все труднее брать несколько выборок между импульсами передачи на этих частотах импульсов, поэтому измерения дальности ограничиваются короткими расстояниями.[2]
Сонар
Гидролокаторы работают так же, как радары, за исключением того, что среда является жидкостью или воздухом, а частота сигнала — звуковая или ультразвуковая. Как и радар, более низкие частоты распространяют относительно более высокие энергии на большие расстояния с меньшей разрешающей способностью. Более высокие частоты, которые затухают быстрее, обеспечивают повышенное разрешение близлежащих объектов.
Сигналы распространяются на скорость звука в среде (почти всегда вода), а максимальная частота повторения импульсов зависит от размера исследуемого объекта. Например, скорость звука в воде составляет 1497 м / с, а толщина человеческого тела составляет около 0,5 м, поэтому PRF для ультразвуковые изображения человеческого тела должно быть менее примерно 2 кГц (1,497 / 0,5).
Другой пример: глубина океана составляет примерно 2 км, поэтому звук возвращается с морского дна за секунду. По этой причине сонар — очень медленная технология с очень низким PRF.
Лазер
Основная статья: лидар
Световые волны могут использоваться в качестве радиолокационных частот, и в этом случае система известна как лидар. Это сокращение от «LIght Detection And Ranging», аналогичное первоначальному значению инициализма «RADAR», которое было RAdio Detection And Ranging. С тех пор оба слова стали широко используемыми английскими словами и поэтому являются скорее сокращениями, чем инициализмами.
Лазерный дальномер или другие дальномеры светового сигнала работают так же, как радар, на гораздо более высоких частотах. Нелазерное обнаружение света широко используется в автоматизированных системах управления машинами (например, электрические глаза, управляющие воротами гаража, сортировочными воротами конвейера и т. Д.), А те, которые используют обнаружение частоты пульса и ранжирование, по сути, являются системами того же типа, что и радар — без наворотов человеческого интерфейса.
В отличие от более низких частот радиосигнала, свет не огибает изгиб Земли и не отражается от ионосферы, как сигналы поисковых радаров диапазона C, и поэтому лидар полезен только в системах прямой видимости, например, в высокочастотных радиолокационных системах.
Характеристики импульсов
Форма импульсов
Важной характеристикой импульсов является их форма, визуально наблюдать которую, можно, например, на экране осциллографа. В общем случае форма импульсов имеет следующие составляющие: фронт — начальный подъём, относительно плоская вершина (не для всех форм) и срез (спад) — конечный спад напряжения
Существует несколько типов импульсов стандартных форм, имеющих относительно простое математическое описание, такие импульсы широко применяются в технике
- Прямоугольные импульсы — наиболее распространённый тип
- Пилообразные импульсы
- Треугольные импульсы
- Трапецеидальные импульсы
- Экспоненциальные импульсы
- Колокольные (колоколообразные) импульсы
- Импульсы, представляющие собой полуволны или другие фрагменты синусоиды (обрезка по горизонтали или по вертикали)
Кроме импульсов стандартной, простой формы иногда, в особых случаях, используются импульсы специальной формы, описываемой сложной функцией, существуют также сложные импульсы, форма которых имеет в значительной степени случайный характер, например, импульсы видеосигнала.
Параметры импульсов
В общем случае импульсы характеризуются двумя основными параметрами — амплитудой (размахом — разностью напряжений между пьедесталом и вершиной импульса) и длительностью (обозначается τ
или
tи)
. Длительность пилообразных и треугольных импульсов определяется по основанию (от начала изменения напряжения до конца), для остальных типов импульсов длительность принято брать на уровне напряжения 50 % от амплитуды, для колоколообразных импульсов иногда используется уровень 10 %, длительность искусственно синтезированных колоколообразных импульсов (с чётко выраженным основанием) и полуволн синусоиды часто измеряется по основанию.
Выброс на вершине прямоугольного импульса
Для разных типов импульсов также вводят дополнительные параметры, уточняющие форму или характеризующие степень её неидеальности — отклонения от идеальной. Например, для описания неидеальности прямоугольных импульсов используются такие параметры, как, (для идеального прямоугольного импульса они равны нулю), неравномерность вершины, а также размер выбросов напряжения после фронта и среза, возникающих в результате переходных паразитных процессов.
Спектральное представление импульсов
Кроме временного представления импульсов, наблюдаемого по осциллографу, существует спектральное представление, выраженное в виде двух функций — амплитудного и фазового спектра.
Спектр одиночного импульса является непрерывным и бесконечным. Амплитудный спектр прямоугольного импульса имеет чётко выраженные минимумы по шкале частот, следующие с интервалом, обратным длительности импульса.
Длительность — передний фронт — импульс
Длительность переднего фронта импульса ис ( t) оказывается тем больше, чем больше величина б, называемая коэффициентом затухания.
Длительность переднего фронта импульса тока коллектора зависит от амплитуды импульса прямого тока эмиттера и от частотных свойств транзистора.
| Выбор / у Доп в импульсном режиме эксплуатации. |
Влияние длительности переднего фронта импульса управления 1ф сказывается в той степени, в какой она соизмерима с длительностью нарастания анодного тока. Если к моменту / рег ( рис. 3.47, а) ток управления не достиг необходимого значения, то площадь ОНВ S0 будет малой и тиристор может выйти из строя. Таким образом, ток / у ДОп должен достигаться за время фф.
Согласно определению длительностью переднего фронта импульса ( / ф) называется время, в течение которого напряжение изменяется от 0 1 до 0 9 своего установившегося значения.
Остается вывести аналитическое выражение для длительности переднего фронта импульса.
Отсюда видно, что чем меньше длительность переднего фронта импульса и чем больше запас коэффициента усиления, тем меньше погрешность измерения времени распространения упругих волн.
| Схема сигнала при расчете временной ошибки от затухания. |
Экспериментально установлено, что наиболее заметное изменение длительности переднего фронта импульса наблюдается при его распространении в среде, причем чем выше поглощающие свойства среды, тем больше это изменение. При распространении упругого импульса в стеклопластиках изменение его крутизны происходит пропорционально коэффициенту затухания и расстоянию, на которое он распространяется.
Из выражений (4.185) и (4.190) видно, что длительность переднего фронта импульса тока коллектора зависит не только от параметров прибора, но также и от сопротивления нагрузки. При этом в схеме с общим эмиттером переходный процесс имеет большую длительность, чем в схеме с общей базой.
Время, в течение которого происходит нарастание импульса, называется длительностью переднего фронта импульса Тф. Часто длительность переднего и заднего фронтов импульса выражают в процентах от длительности всего импульса.
Огибающая высокочастотного импульса, так же как и форма импульса тока магнетрона, определяется длительностью переднего фронта импульса, заднего фронта импульса, величинами выброса в начале импульса и завала верхушки импульса.
| Блок-схема для наблюдения огибающей высокочастотного импульса. |
Огибающая высокочастотного импульса, так же как и форма импульса тока магнетрона, определяется длительностью переднего фронта импульса, длительностью заднего фронта импульса, величинами выброса в начале импульса и завала верхушки импульса.
Параметры кодовых и стробирующего импульсов: амплитуда напряжения 4 в ( при нагрузке 40 ом), длительность переднего фронта импульса 1 мсек, длительность импульса 2 — 8 мсек.
Виды сигналов
Протон импульс
Существует несколько типов классификации имеющихся сигналов. Рассмотрим, какие бывают виды.
- По физической среде носителя данных разделяют электрический сигнал, оптический, акустический и электромагнитный. Имеется еще несколько видов, однако они малоизвестны.
- По способу задания сигналы делятся на регулярные и нерегулярные. Первые представляют собой детерминированные методы передачи данных, которые задаются аналитической функцией. Случайные же формулируются за счет теории вероятности, а также они принимают любые значения в различные промежутки времени.
- В зависимости от функций, которые описывают все параметры сигнала, методы передачи данных могут быть аналоговыми, дискретными, цифровыми (способ, который является квантованным по уровню). Они используются для обеспечения работы многих электрических приборов.
Теперь читателю известны все виды передачи сигналов. Разобраться в них не составит труда любому человеку, главное — немного подумать и вспомнить школьный курс физики.
Сигнал
Сигнал представляет собой специальный код, который передается в пространство одной или несколькими системами. Эта формулировка является общей.
В сфере информации и связи сигналом назван специальный носитель каких-либо данных, который используется для передачи сообщений. Он может быть создан, но не принят, последнее условие не обязательно. Если же сигнал является сообщением, то его «ловля» считается необходимой.
Описываемый код передачи данных задается математической функцией. Она характеризует все возможные изменения параметров. В радиотехнической теории эта модель считается базовой. В ней же аналогом сигнала был назван шум. Он представляет собой функцию времени, которая свободно взаимодействует с переданным кодом и искажает его.
В статье охарактеризованы виды сигналов: дискретный, аналоговый и цифровой. Также коротко дана основная теория по описываемой теме.
Дискретный сигнал
Сейчас каждый человек пользуется мобильным телефоном или какой-то «звонилкой» на своем компьютере. Одна из задач приборов или программного обеспечения – это передача сигнала, в данном случае голосового потока. Для переноса непрерывной волны необходим канал, который имел бы пропускную способность высшего уровня. Именно поэтому было предпринято решение использовать дискретный сигнал. Он создает не саму волну, а ее цифровой вид. Почему же? Потому что передача идет от техники (например, телефона или компьютера). В чем плюсы такого вида переноса информации? С его помощью уменьшается общее количество передаваемых данных, а также легче организуется пакетная отправка.
Понятие «дискретизация» уже давно стабильно используется в работе вычислительной техники. Благодаря такому сигналу передается не непрерывная информация, которая полностью закодирована специальными символами и буквами, а данные, собранные в особенные блоки. Они являются отдельными и законченными частицами. Такой метод кодировки уже давно отодвинулся на второй план, однако не исчез полностью. С помощью него можно легко передавать небольшие куски информации.
3.6. Модуляция шумовой несущей
В качестве переносчика можно использовать не только периодические колебания, но и узкополосный случайный процесс. Такие переносчики также находят практическое применение. Например, в оптических системах связи, в которых используется некогерентное излучение, сигнал, по существу, представляет собой узкополосный гауссов шум.
Согласно (2.36) узкополосный случайный процесс можно представить как квазигармоническое колебание
с медленно изменяющимися огибающей и фазой .
При амплитудной модуляции в соответствии с передаваемым сообщением изменяется огибающая
U(t),
при фазовой модуляции — фаза и при частотной — мгновенная частота .
Рассмотрим амплитудную модуляцию шумовой несущей. Выражение для модулированной несущей в этом случае можно записать в виде
y(t) =
[1 + ти(t)]f(t),
(3.57)
где f(t)
— переносчик,
u(t)
— модулирующая функция (видеосигнал),
m
— коэффициент модуляции.
Предполагается, что модулирующий процесс u(t)
также представляет собой стационарный нормальный процесс со средним значением, равным нулю
u(t) = 0.
Процессы
f(t)
и
u(t)
независимы. При этих ограничениях функция корреляции модулированной по амплитуде шумовой несущей будет
(3.58)
Теперь находим энергетический спектр
Первый интеграл дает энергетический спектр шумовой несущей . Для второго интеграла на основании теоремы о спектре произведения имеем
Окончательно спектр модулированной несущей будет равен:
(3.59)
Таким образом, спектр модулированной по амплитуде шумовой несущей получается суперпозицией спектра несущей и свертки этого спектра со спектром передаваемого сообщения, сдвинутого в область высоких частот на величину .Аналогично определяются функция корреляции и энергетический спектр при ФМ и ЧМ.
Применение «шумовых» сигналов позволяет ослабить влияние замираний в каналах с многолучевым распространением радиоволн. Поясним это на простейшем примере. Пусть на вход приемника поступают сигналы двух лучей и сдвигом на τ
. время т. Мощность результирующего сигнала, определяемая за достаточно большое время
Т,
где — функция корреляции сигнала, Р0
— его средняя мощность. Функция корреляции шума быстро убывает с увеличением т и тем быстрее, чем шире его спектр. Следовательно, при достаточно большой ширине спектра можно считать 0 и
,
т. е. средняя мощность принятого сигнала, несмотря на замирания, остается примерно постоянной.