Electric motors appeared quite a long time ago, but great interest in them arose when they began to represent an alternative to internal combustion engines. Of particular interest is the issue of electric motor efficiency, which is one of its main characteristics.
Each system has a certain efficiency factor, which characterizes the efficiency of its operation as a whole. That is, it determines how well a system or device delivers or converts energy. Efficiency has no value, and most often it is presented as a percentage or a number from zero to one.
Efficiency parameters in electric motors
The main task of an electric motor is to convert electrical energy into mechanical energy. Efficiency determines the effectiveness of a given function. The formula for electric motor efficiency is as follows:
- n = p2/p1
In this formula, p1 is the supplied electrical power, p2 is the useful mechanical power that is generated directly by the engine. Electrical power is determined by the formula: p1=UI (voltage multiplied by current), and the value of mechanical power by the formula P=A/t (ratio of work per unit time). This is how the calculation of the efficiency of an electric motor looks like. However, this is the simplest part of it. Depending on the purpose of the engine and the scope of its application, the calculation will differ and take into account many other parameters. In fact, the formula for electric motor efficiency includes many more variables. The simplest example was given above.
Determination by dimensions
Another way is to carry out measurements and calculations. Many of those who are interested in how to find out the power of a three-phase motor prefer it. You will need the following data:
Core diameter in centimeters (D). It is measured from the inside of the stator. The length of the core is also required, taking into account the ventilation holes.
Gross rotation frequency (n) and mains frequency (f).
Using them, calculate the polar division index. D multiplied by n and by Pi - let's call this reading A. 120 multiplied by f - this is B. Divide A by B.
As you can see, to calculate the value, it is enough to remember the school mathematics course.
Decrease in efficiency
The mechanical efficiency of an electric motor must be taken into account when choosing a motor. Losses associated with engine heating, power reduction, and reactive currents play a very important role. Most often, a drop in efficiency is associated with the release of heat, which naturally occurs during engine operation. The reasons for the release of heat can be different: the engine can heat up due to friction, as well as for electrical and even magnetic reasons. As the simplest example, we can cite a situation where 1,000 rubles were spent on electrical energy, and work was done for 700 rubles. In this case, the efficiency will be equal to 70%.
To cool electric motors, fans are used that drive air through the gaps created. Depending on the class of engines, heating can be carried out to a certain temperature. For example, class A engines can heat up to 85-90 degrees, class B - up to 110 degrees. In the case when the temperature exceeds the permissible limit, this may indicate a short circuit in the stator.
Energy loss when the engine heats up
An important role in the operation of an electric motor is played by energy losses when the engine heats up. Most often, a drop in efficiency occurs from natural heat transfer during operation of the mechanism.
An electric motor usually heats up due to friction and also due to the electrical and magnetic forces acting on it during operation. For example, the energy consumption of the motor was 100 rubles, and mechanical energy was estimated at 80 rubles. In this case, the efficiency of the electric motor will be 80%.
To cool the electric motor, there are special fans that circulate air through the running motor and thereby create a more optimal temperature for its operation.
The degree of load has a huge impact on the operation of the electric motor. Without load, the motor operates with an efficiency of 0%. If the engine is loaded at 25%, the efficiency will be 83%. At 100% load, the efficiency will be 87%.
Average efficiency of electric motors
It is worth noting that the efficiency of a DC electric motor (and alternating current too) varies depending on the load:
- At idle, the efficiency is 0%.
- At a load of 25%, the efficiency is 83%.
- At 50% load the efficiency is 87%.
- At 75% load the efficiency is 88%.
- At 100% load the efficiency is 87%.
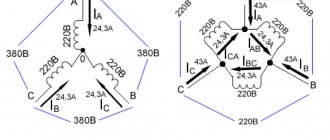
One of the reasons for the drop in efficiency is current asymmetry, when a different voltage is applied to each of the three phases. If, for example, the voltage in the first phase is 410 V, in the second - 403 V, and in the third - 390 V, then the average value will be equal to 401 V. The asymmetry in this case will be equal to the difference between the maximum and minimum voltage on the phases (410 -390), that is, 20 V. The formula for the efficiency of an electric motor for calculating losses will look like this in our situation: 20/401*100 = 4.98%. This means that we lose 5% efficiency during operation due to the voltage difference between the phases.
Determining the power of an electric motor without a tag
If there is no technical certificate or tag on the engine, the question arises: how to find out the power of an electric motor without a plate or technical documentation? The most common and fastest methods, which we will discuss in the article:
- According to shaft diameter and length
- By dimensions and mounting dimensions
- By winding resistance
- By no-load current
- By current in the terminal box
- Using an induction meter (for household electric motors)
Determining engine power by shaft diameter and length
The simplest ways to determine the power and brand of an engine are the overall dimensions - shaft or mounting holes. The table shows the lengths and diameters of the shafts (D1) and length (L1) for each model of an asynchronous industrial three-phase motor. Go to detailed overall dimensions of AIR electric motors
When replacing a broken Soviet electric motor with a new one, it often turns out that there is no nameplate on it. We are often asked questions: how to find out the power of an electric motor? How to determine engine speed? In this article we will look at how to determine the parameters of an electric motor without a tag - by shaft diameter, dimensions, current. Order a new electric motor by phone
General losses and drop in efficiency
There are a lot of negative factors that influence the decrease in the efficiency of an electric motor. There are certain techniques that allow you to determine them. For example, you can determine whether there is a gap through which power is partially transferred from the network to the stator and then to the rotor.
Starter losses also occur and they consist of several values. First of all, these may be losses related to eddy currents and magnetization reversal of the stator cores.
If the motor is asynchronous, then additional losses occur due to teeth in the rotor and stator. Eddy currents can also occur in individual engine components. All this in total reduces the efficiency of the electric motor by 0.5%. In asynchronous motors, all losses that may occur during operation are taken into account. Therefore, the efficiency range can vary from 80 to 90%.
Mechanical type of losses. Brush friction
The mechanical type is the costs that occur in the bearings, and brush friction occurs in all asynchronous electric motors whose rotor is wound. When the machine starts, they are zero. As the operating speed of the unit increases, they also grow. In a three-phase engine, the speed takes a certain value and does not change throughout the entire operating cycle. Therefore, these losses in it will always be constant.
Another name is copper costs. They appear due to the fact that electric current flows through the stator and rotor windings. When the load on the engine changes, the electric current also changes its value, which leads to a change in the amount of copper loss. This was the source of their name. You can get them by testing a three-phase unit with the rotor locked.
The main task of an asynchronous machine is to convert electrical energy into mechanical force. While this transformation is taking place, one energy becomes another, it goes through several different stages. This energy undergoing transformation stages can be depicted using a diagram.
Engine energy diagram
The engine uses it in part to maintain stator costs: steel and copper. The part that remains intact goes to the armature as an input to the rotor.
It follows that the input to the rotor is equal to the stator losses (P2 = Pin). Now the retained input energy must undergo transformation and become mechanical. However, it cannot become a mechanical solution, since it supports losses.
As we have already understood, rotor losses can be divided into two groups: copper and iron. The latter are negligible, so much so that they can be neglected. This is due to the fact that they depend on the rotor frequency, which is approximately 1.5 Hz.
Following from the above, we can safely say that the rotor has only copper losses. So, after its support, the unconverted part of the electricity that remains becomes mechanical. It is designated as Pm.
After all this, the newly converted force is sent to the load, which is helped by the shaft. But at this stage, mechanical costs are inevitable. These include friction and resistance in the air. Therefore, the total mechanical energy that is reproduced in the electric motor is necessarily lost to maintain these losses.
So the resulting energy is sent to the motor shaft. It is eventually supplied to the load. This is designated as Pout. It is called shaft energy or, in other words, useful.
Pout is the mechanical loss Pm. They are associated with resistance in the air and friction.
So, losses in the motor can be mechanical, magnetic or electrical.
Power P1 is supplied from the supply network to the stator winding. One part of it is consumed to cover the magnetic losses in the stator core PC1. It is also used in the stator winding to support electrical losses due to heated winding.
All the power that remains is supplied to the rotor by magnetic flux. Because of this, it is called electromagnetic. This remaining electromagnetic power is converted into mechanical power. The latter is called the total “mechanical power of the electric drive”.
The power of rotor electrical losses is directly dependent on slip, so an asynchronous machine will operate more economically, the lower the slip value.
Last, but not least, is the occurrence of magnetic losses. They also arise in the moving element of the electric motor, but the low electric current frequency (f2 = f1s) makes them so small that they can also be neglected.
The friction of the rotating parts of the system against the air, as well as the friction occurring in the bearing, causes the appearance of mechanical flow.
Stray fields, along with pulsations in the stator and armature, cause an additional type of loss.
From everything said above, you can put together a formula for total losses. It is given below:
∑р = рс1 + ре1 + ре2+ рмех + рд
Car engines
The history of the development of electric motors begins with the discovery of the law of electromagnetic induction. According to him, the induced current always moves in such a way as to counteract the cause that causes it. It was this theory that formed the basis for the creation of the first electric motor.
Modern models are based on the same principle, but are radically different from the first copies. Electric motors have become much more powerful, more compact, but most importantly, their efficiency has increased significantly. We have already written above about the efficiency of an electric motor, and compared to an internal combustion engine this is an amazing result. For example, the maximum efficiency of an internal combustion engine reaches 45%.
Advantages of an electric motor
High efficiency is the main advantage of such a motor. And if an internal combustion engine spends more than 50% of energy on heating, then in an electric motor a small part of the energy is spent on heating.
The second advantage is light weight and compact dimensions. For example, Yasa Motors has created a motor that weighs only 25 kg. It is capable of producing 650 Nm, which is a very decent result. Also, such motors are durable and do not require a gearbox. Many electric car owners talk about the efficiency of electric engines, which is logical to some extent. After all, during operation, the electric motor does not emit any combustion products. However, many drivers forget that coal, gas or enriched uranium must be used to produce electricity. All these elements pollute the environment, so the environmental friendliness of electric motors is a very controversial issue. Yes, they do not pollute the air during operation. Power plants do this for them when producing electricity.
Increasing the efficiency of electric motors
Electric motors have some disadvantages that have a negative impact on operating efficiency. These are a weak starting torque, a high starting current and a mismatch between the mechanical torque of the shaft and the mechanical load. This leads to the device's efficiency decreasing.
To increase efficiency, they try to ensure the engine load is up to 75% or higher and increase power factors. There are also special devices for regulating the frequency of the supplied current and voltage, which also leads to increased efficiency and increased efficiency.
One of the most popular devices for increasing the efficiency of an electric motor is a soft starter, which limits the rate of increase in the starting current. It is also appropriate to use frequency converters to change the rotation speed of the motor by changing the voltage frequency. This leads to a reduction in energy consumption and ensures smooth engine starting and high control accuracy. The starting torque also increases, and under variable load the rotation speed is stabilized. As a result, the efficiency of the electric motor increases.
Principle of operation
Let there be a frame that is placed in a magnetic field. It can be connected to a power source. In this case, assume that charge carriers move counterclockwise. To do this, the positive pole of the generator must be connected to the right, and the negative to the left. This frame can rotate around a horizontal axis. It is placed in a magnetic field whose lines are directed perpendicular to the axis of rotation.
Magnetism will affect each side of the frame differently. To determine how the forces will act, you need to use the gimlet rule: if the palm is positioned in such a way that the magnetic flux lines enter it, and the fingers coincide with the direction of the current, then the bent thumb will indicate the direction of the influence. Thus it turns out:
- north side - the force is directed upward (F1);
- south side - down (F2);
- western and eastern sections - the force does not act.
As a result, the current-carrying frame begins to rotate. But as soon as it changes its position by 90 degrees, it will immediately freeze. The acting forces will change their position. This will cause them to stretch the frame. It turns out that in a magnetic field the conductor tends to turn so that its plane becomes perpendicular to the direction of the field.
This effect is used in the operation of an electric motor. By changing the direction of the current, you can achieve constant rotation of the frame . This is done using a cylinder cut into two parts. One wire of the frame is connected from the inside to the right half-ring, and the other to the left. From the external sides, using sliding contacts, voltage is supplied from the current source.
With this scheme, the moment the frame rotates 90 degrees, the cuts in the cylinder will change their position. Having accelerated, the structure will pass this position by inertia, that is, it will complete half a revolution. Two oppositely directed Ampere forces will again act on its sides. The frame will begin to unfold again, tending to rotate clockwise. This phenomenon will occur continuously in such a system.
The result is a device that always rotates the frame in one direction. In fact, this is a primitive electric motor or, as it is called in physics, a rotating electric machine. Its fundamental difference from an internal combustion engine (ICE) is that it uses electrical energy rather than thermal energy for rotation.
Maximum motor efficiency
Depending on the type of design, the efficiency of electric motors can vary from 10 to 99%. It all depends on what kind of engine it will be. For example, the efficiency of a piston-type pump electric motor is 70-90%. The final result depends on the manufacturer, the structure of the device, etc. The same can be said about the efficiency of the electric motor of a crane. If it is equal to 90%, then this means that 90% of the electricity consumed will go to performing mechanical work, the remaining 10% will go to heating the parts. Still, there are the most successful models of electric motors, the efficiency of which approaches 100%, but is not equal to this value.
Is efficiency above 100% possible?
It's no secret that electric motors whose efficiency exceeds 100% cannot exist in nature, since this contradicts the basic law of conservation of energy. The fact is that energy cannot come from nowhere and disappear in the same way. Any engine needs an energy source: gasoline, electricity. However, gasoline does not last forever, just like electricity, because their reserves have to be replenished. But if there was an energy source that did not need replenishment, then it would be quite possible to create a motor with an efficiency of over 100%. Russian inventor Vladimir Chernyshov showed a description of a motor that is based on a permanent magnet, and its efficiency, as the inventor himself assures, is more than 100%.
Hydroelectric power station as an example of a perpetual motion machine
For example, let's take a hydroelectric power station, where energy is generated by falling water from a great height. Water turns a turbine, which produces electricity. The fall of water is carried out under the influence of Earth's gravity. And although the work to produce electricity is done, the Earth's gravity does not become weaker, that is, the force of attraction does not decrease. Then the water evaporates under the influence of sunlight and returns to the reservoir. This completes the cycle. As a result, electricity has been generated and costs for its production have been resumed.
Of course, we can say that the Sun is not eternal, this is true, but it will last a couple of billion years. As for gravity, it constantly does work, pulling moisture from the atmosphere. To broadly generalize, a hydroelectric power plant is an engine that converts mechanical energy into electrical energy, and its efficiency is more than 100%. This makes it clear that we should not stop looking for ways to create an electric motor whose efficiency can be more than 100%. After all, not only gravity can be used as an inexhaustible source of energy.
Determination of shaft speed
Three-phase asynchronous motors are divided into 4 types based on rotor speed: 3000, 1500, 1000 and 750 rpm. min. Here is an example of marking based on AIR 180:
- AIR 180 M2 – where 2 is 3000 rpm.
- AIR 180 M4 - 4 is 1500 rpm. min.
- AIR 180 M6 – 6 indicates a rotation speed of 1000 rpm.
- AIR 180 M8 - 8 means that the output shaft rotation speed is 750 rpm.
The easiest way to determine the number of revolutions of a three-phase asynchronous electric motor is to remove the rear casing and look at the stator winding.
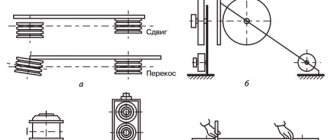
For a 3000 rpm engine, the stator winding coil occupies half a circle - 180 °, that is, the beginning and end of the section are parallel to each other and perpendicular to the center. For electric motors at 1500 rpm the angle is 120°, at 1000 rpm it is 90°. A schematic view of the coils is shown in the drawing. See the table for all motor winding data.
Find out the rotation speed using an ammeter
You can find out the motor shaft speed by counting the number of poles. To do this, we need a milliammeter - we connect the measuring device to the stator winding. When the motor shaft rotates, the ammeter needle will deviate. The number of needle deflections per revolution is equal to the number of poles.
- 2 poles – 3000 rpm
- 4 poles – 1500 rpm
- 6 poles – 2000 rpm
- 8 poles – 750 rpm
Permanent magnets as energy sources for motors
The second interesting source is a permanent magnet, which does not receive energy from anywhere, and the magnetic field is not consumed even when doing work. For example, if a magnet attracts something to itself, it will do the work, and its magnetic field will not become weaker. They have tried to use this property more than once to create a so-called perpetual motion machine, but so far nothing more or less normal has come of it. Any mechanism will wear out sooner or later, but the source itself, which is a permanent magnet, is practically eternal.
However, there are experts who claim that over time, permanent magnets lose their strength as a result of aging. This is not true, but even if it were true, it could be brought back to life with just one electromagnetic pulse. An engine that would require recharging once every 10-20 years, although it cannot claim to be eternal, comes very close to this.
There have already been many attempts to create a perpetual motion machine based on permanent magnets. So far there have been no successful solutions, unfortunately. But given the fact that there is a demand for such engines (it simply cannot but exist), it is quite possible that in the near future we will see something that comes very close to the model of a perpetual motor that will run on renewable energy.
Compare dimensions
If there is no plate or it is difficult to read something on it, then you can determine the power of an asynchronous electric motor without a passport by its dimensions, namely by the diameter of the shaft.
This method of determination is used in practice more often than others, since you only need to measure the shaft with a caliper and do not need a network connection. After measuring the diameter, the obtained values are compared with the table and the approximate power is determined. This method allows you to obtain fairly accurate characteristics without a tag. The table for this is given below.
This method of determining the power of an electric motor by dimensions (by rotor) is suitable for both three-phase and single-phase asynchronous motors
Please note “P” is indicated in kW (kilowatts), as is customary in electrical engineering, and not as in physics - in watts
If for some reason the data from this table does not suit you, then there is another way to find out the power of an electric motor by its overall dimensions, you need to measure:
- shaft diameter;
- its rotation frequency (number of pole pairs);
- mounting dimensions;
- flange diameter or width of mounting feet;
- height to the center of the shaft;
- motor length (without protruding shaft part).
And compare these data with the sizes of electric machines of a single series 4A, AIR, A, AO. They can be found in various directories or catalogs of companies that produce them.
To determine the engine power of the common AIR series based on the mounting holes on the feet, use this table.
To determine the motor power based on the flange diameter (D20) and the diameter of the flange mounting holes (D22), use the following data:
With time and practice, you will learn to approximately determine the engine power by appearance, mentally comparing with those that you have encountered before, but for this you need to know a number of standard ratings of electric motors: 0.25; 0.37; 0.55; 0.75; 1.1; 1.5; 2.2; 3.0; 4.0; 5.5; 7.5; eleven; 15; 18.5; 22; thirty; 37; 45; 55; 75 kW.