Electric motor power calculation
Calculation of electric motor power by current can be done using our online calculator:
The result obtained can be rounded to the nearest standard power value.
Standard values of electric motor power : 0.25; 0.37; 0.55; 0.75; 1.1; 1.5; 2.2; 3.0; 4.0; 5.5; 7.5; eleven; 15; 18.5; 22; thirty; 37; 45; 55; 75 kW, etc.
Engine power is calculated using the following formula:
P=√3UIcosφη
- U - Rated voltage (voltage to which the electric motor is connected);
- I - Rated current of the electric motor (taken from the passport data of the electric motor , and in their absence is determined by calculation);
- cosφ - Power factor - the ratio of active power to total power (taken from 0.75 to 0.9 depending on the power of the electric motor);
- η - Efficiency factor - the ratio of the electrical power consumed by the electric motor from the network to the mechanical power on the motor shaft (taken from 0.7 to 0.85 depending on the power of the electric motor);
AIS250M8 electric motor 30 kW 740 rpm (three-phase 380/660) Elmash Russia
AIS250M8 asynchronous three-phase electric motor 30 kW 740 rpm squirrel-cage rotor, with power tied to overall dimensions according to the European DIN standard (Cenelec), designed for connection to a three-phase alternating current network with a voltage of 380V or 660V Russia. The warranty period is 2 years.
Send by email
AIS250M8 electric motor 30 kW 740 rpm (three-phase 380/660) Elmash Russia
AIS250M8 asynchronous three-phase electric motor 30 kW 740 rpm squirrel-cage rotor, with power tied to overall dimensions according to the European DIN standard (Cenelec), designed for connection to a three-phase alternating current network with a voltage of 380V or 660V Russia. The warranty period is 2 years.
Name of your friend * :
Email address of your friend *:
Description
AIS250M8 is a three-phase electric motor 30 kW 740 rpm , asynchronous for general purpose, widely used in industrial facilities and in agricultural units. Suitable for replacing imported engines of the same power and overall connection dimensions. ELMASH motors are developed and produced by Voronezh Electromechanical Plant CJSC together with other manufacturers in Russia and foreign countries.
Explanation of markings
AIS 250 8 U2 IM xxxx IP 55
AIS
—
asynchronous electric motor , European standard “DIN (cenelec)” ; 250
— engine size (distance from the axis of rotation to the mounting plane in mm);
M
—installation dimension along the length of the frame;
8
— the number of poles is responsible for the number of rotor revolutions up to 750 rpm;
U2
- climatic version 2 - placement category according to GOST 15150-69;
IM xxxx
- designation of mounting bracket;
IP 55
- degree of protection against dust and water splashes;
Motor current calculation
The rated and starting current of an electric motor can be calculated by power using our online calculator:
The rated motor current is calculated using the following formula:
Inom=P/√3Ucosφη
- P - Rated power of the electric motor (taken from the motor’s passport data or determined by calculation);
- U - Rated voltage (voltage to which the electric motor is connected);
- cosφ - Power factor - the ratio of active power to total power (taken from 0.75 to 0.9 depending on the power of the electric motor);
- η - Efficiency factor - the ratio of the electrical power consumed by the electric motor from the network to the mechanical power on the motor shaft (taken from 0.7 to 0.85 depending on the power of the electric motor);
The starting current of the electric motor is calculated using the formula:
Istart=Inom* K
- K - Starting current multiplicity, this value is taken from the electric motor passport, or from catalog data (in the above online calculators, the starting current multiplicity is determined approximately based on the other specified characteristics of the electric motor).
Operating modes of electric motors
The operating mode determines the load on the electric motor. In some cases it remains virtually unchanged, in others it may change. The nature of the expected load must be taken into account when choosing an engine. Current standards provide for the following operating modes:
Mode S1 (long-term). In this operating mode, the load remains constant for the entire time until the temperature of the electric motor reaches the required value. Drive power is calculated using the formulas given above.
Calculation of electric motor power factor
Online calculation of power factor (cosφ) of an electric motor
Calculation of cosφ (cosine phi) of the engine is carried out using the following formula:
cosφ=P/√3UIη
- P - Rated power of the electric motor (taken from the motor’s passport data or determined by calculation);
- U - Rated voltage (voltage to which the electric motor is connected);
- I - Rated current of the electric motor (taken from the passport data of the electric motor , and in their absence is determined by calculation);
- η - Efficiency factor - the ratio of the electrical power consumed by the electric motor from the network to the mechanical power on the motor shaft (taken from 0.7 to 0.85 depending on the power of the electric motor);
Main characteristics of electric motors
The nominal mode of the electric motor corresponds to the data indicated on its plate (passport). In this mode, the engine must meet the requirements established by GOST.
There are eight different operating modes, of which the main ones can be considered:
· long-term nominal mode;
· short-term nominal mode with a working period of 10, 30 and 90 minutes;
· intermittent and short-term nominal mode with on-time (ON) 15, 25, 40, 60%, with a duration of one cycle of no more than 10 minutes.
Rated power P
n of an electric motor is the useful mechanical power on the shaft indicated on the plate at rated operating mode. Rated power is expressed in W or kW.
Rated speed nн
The motor shaft is called the number of revolutions per minute indicated on the plate, corresponding to the nominal mode.
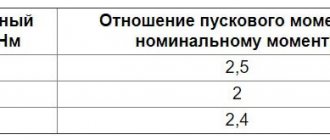
Nominal torque
— torque developed by the engine on the shaft at rated power and rated speed:
M
n - nominal torque, N m (1 kgf m = 9.81 N m ≈ 10 N m);
R
n — rated power, kW;
n
n - rated rotation speed, rpm.
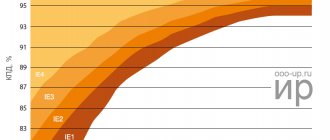
Nominal efficiency
hn of an electric motor - the ratio of its nominal
power to the power consumed by it from the network at rated voltage:
R
n — rated power, kW;
U
n - rated (linear) voltage, V;
I
n - rated current, A;
cosφн - rated power factor.
Rated current
of an electric motor is the current strength corresponding to the rated mode. The actual current value at rated mode may differ from that indicated on the motor panel within the established tolerances for efficiency. and power factor.
Maximum torque
electric motor - the greatest torque developed during the working connection of the windings and a gradual increase in the moment of resistance on the shaft above the nominal, provided that the voltage at the motor terminals and the frequency of the alternating current remain unchanged and equal to the nominal values.
Initial starting torque
electric motor - its torque with a stationary rotor, rated values of voltage and frequency of alternating current and working connection of the windings.
Minimum torque
of an electric motor during the starting process is called the smallest torque developed by the motor with the working connection of the windings and the rotation speed ranging from zero to the value corresponding to the maximum torque (the voltage at the motor terminals and the frequency of the alternating current must remain unchanged and equal to their nominal values).
Rated speed
The electric motor shaft is the next parameter after power, on which the design, dimensions, cost and efficiency of the electric drive largely depend. The most acceptable speeds in the power range from 0.6 to 100 kW are 3000, 1500 and 1000 rpm (synchronous). Electric motors with a rotation speed of 750 rpm (eight-pole) of low power have low energy performance. For the same power, electric motors with higher rotation speeds have higher efficiency values. and cosφ, as well as smaller dimensions and weight, which determines their lower cost.
No-load current I
is largely determined by the strength of the magnetizing current
I
0Р.
approximately we can assume I
=
I
0P. For cars
main version relative value of no-load current
I
= (0.2—0.6)
I
n (the lower the rated speed and power of the electric motor, the greater it is). The dependence of the no-load current on the motor speed is given in Table 2.1.
Table 2.1. No-load currents for basic motors
Average value of no-load currents
(in fractions of the rated current) at synchronous speed, rpm
Source: eti.su
Calculation of electric motor efficiency
Online calculation of efficiency (efficiency) of an electric motor
The efficiency of the electric motor is calculated using the following formula:
η=P/√3UIcosφ
- P - Rated power of the electric motor (taken from the motor’s passport data or determined by calculation);
- U - Rated voltage (voltage to which the electric motor is connected);
- I - Rated current of the electric motor (taken from the passport data of the electric motor , and in their absence is determined by calculation);
- cosφ - Power factor - the ratio of active power to total power (taken from 0.75 to 0.9 depending on the power of the electric motor);
Did you find these online calculators useful? Or maybe you still have questions ? Write to us in the comments!
Didn’t find an article on the website on a topic that interests you regarding electrical engineering? Write to us here. We will definitely answer you.
Calculation of electric current by power: formulas, online calculation, selection of machine
When designing electrical wiring in a room, you need to start by calculating the current strength in the circuits. An error in this calculation can be costly later. An electrical outlet can melt if exposed to too much current. If the current in the cable is greater than the calculated current for a given material and core cross-section, the wiring will overheat, which can lead to melting of the wire, a break or short circuit in the network with unpleasant consequences, among which the need to completely replace the electrical wiring is not the worst thing.
It is also necessary to know the current strength in the circuit to select circuit breakers, which should provide adequate protection against network overload. If the machine is set with a large margin at its nominal value, by the time it is triggered, the equipment may already be out of order. But if the rated current of the circuit breaker is less than the current that appears in the network during peak loads, the circuit breaker will drive you crazy, constantly cutting off power to the room when you turn on the iron or kettle.
Climatic versions of electric motors
When choosing an electric motor, not only its technical characteristics are taken into account, but also the environmental conditions in which it will be operated.
Modern electric drives are available in different climatic versions. Categories are marked with corresponding letters and numbers:
- U - models for use in temperate climates;
- HL - electric motors adapted to cold climates;
- TS - versions for dry tropical climates;
- TV - versions for humid tropical climates;
- T - universal versions for tropical climates;
- О - electric motors for operation on land;
- M - engines for operation in marine climates (cold and temperate);
- B - models that can be used in any area on land and at sea.
The numbers in the model nomenclature indicate the type of its placement:
- 1 — possibility of operation in open areas;
- 2 — installation in rooms with free access of air;
- 3 — operation in closed workshops and premises;
- 4 — use in industrial and other premises with the ability to regulate climatic conditions (availability of ventilation, heating);
- 5 — versions designed for operation in areas of high humidity, with high condensation formation.
Selecting the rating of the circuit breaker
Applying the formula I = P/209, we find that with a load with a power of 1 kW, the current in a single-phase network will be 4.78 A. The voltage in our networks is not always exactly 220 V, so it would not be a big mistake to calculate the current strength with a small margin like 5 A for every kilowatt of load. It is immediately clear that it is not recommended to connect an iron with a power of 1.5 kW to an extension cord marked “5 A”, since the current will be one and a half times higher than the rated value. You can also immediately “graduate” the standard ratings of the machines and determine what load they are designed for:
- 6 A – 1.2 kW;
- 8 A – 1.6 kW;
- 10 A – 2 kW;
- 16 A – 3.2 kW;
- 20 A – 4 kW;
- 25 A – 5 kW;
- 32 A – 6.4 kW;
- 40 A – 8 kW;
- 50 A – 10 kW;
- 63 A – 12.6 kW;
- 80 A – 16 kW;
- 100 A – 20 kW.
Using the “5 amperes per kilowatt” technique, you can estimate the current strength that appears in the network when connecting household devices. You are interested in peak loads on the network, so for the calculation you should use the maximum power consumption, not the average. This information is contained in the product documentation. It is hardly worth calculating this indicator yourself by summing up the rated powers of the compressors, electric motors and heating elements included in the device, since there is also such an indicator as the efficiency factor, which will have to be assessed speculatively with the risk of making a big mistake.
When designing electrical wiring in an apartment or country house, the composition and passport data of the electrical equipment that will be connected are not always known for certain, but you can use the approximate data of electrical appliances common in our everyday life:
- electric sauna (12 kW) – 60 A;
- electric stove (10 kW) – 50 A;
- hob (8 kW) – 40 A;
- instantaneous electric water heater (6 kW) – 30 A;
- dishwasher (2.5 kW) - 12.5 A;
- washing machine (2.5 kW) - 12.5 A;
- Jacuzzi (2.5 kW) – 12.5 A;
- air conditioner (2.4 kW) – 12 A;
- Microwave oven (2.2 kW) – 11 A;
- storage electric water heater (2 kW) – 10 A;
- electric kettle (1.8 kW) – 9 A;
- iron (1.6 kW) – 8 A;
- solarium (1.5 kW) – 7.5 A;
- vacuum cleaner (1.4 kW) – 7 A;
- meat grinder (1.1 kW) – 5.5 A;
- toaster (1 kW) – 5 A;
- coffee maker (1 kW) – 5 A;
- hair dryer (1 kW) – 5 A;
- desktop computer (0.5 kW) – 2.5 A;
- refrigerator (0.4 kW) – 2 A.
The power consumption of lighting devices and consumer electronics is small; in general, the total power of lighting devices can be estimated at 1.5 kW and a 10 A circuit breaker is sufficient for a lighting group. Consumer electronics are connected to the same outlets as irons; it is not practical to reserve additional power for them.
If you sum up all these currents, the figure turns out to be impressive. In practice, the possibility of connecting the load is limited by the amount of allocated electrical power; for apartments with an electric stove in modern houses it is 10 -12 kW and at the apartment input there is a machine with a nominal value of 50 A. And these 12 kW must be distributed, taking into account the fact that the most powerful consumers concentrated in the kitchen and bathroom. Wiring will cause less cause for concern if it is divided into a sufficient number of groups, each with its own machine. For the electric stove (hob), a separate input with a 40 A automatic circuit breaker is made and a power outlet with a rated current of 40 A is installed; nothing else needs to be connected there. A separate group is made for the washing machine and other bathroom equipment, with a machine of the appropriate rating. This group is usually protected by an RCD with a rated current 15% greater than the rating of the circuit breaker. Separate groups are allocated for lighting and for wall sockets in each room.
What current does the motor consume from the network during startup and operation?
The passport of the electric motor indicates the current at the rated load on the shaft.
If, for example, 13.8/8 A is indicated, then this means that when the engine is connected to a 220 V network and at a rated load, the current consumed from the network will be equal to 13.8 A. When connected to a 380 V network, there will be a current of 8 A is consumed, that is, the power equality is valid: √ 3 x 380 x 8 = √ 3 x 220 x 13.8. Knowing the rated power of the motor (from the passport), you can determine its rated current. When the motor is connected to a three-phase 380 V network, the rated current can be calculated using the following formula:
I n = P n/ ( √3 U n x η x s osφ),
where P n is the rated power of the engine in kW, U n is the network voltage, in kV (0.38 kV). Efficiency factor (η) and power factor (with osφ) are the motor’s nameplate values, which are written on the shield in the form of a metal plate. See also - What passport data are indicated on the shield of an asynchronous motor.
Rice. 1. Electric motor passport. Rated power 1.5 kV, rated current at voltage 380 V – 3.4 A.
If the efficiency is not known. and the power factor of the engine, for example, if there is no passport plate on the engine, then its rated current with a small error can be determined by the ratio “two amperes per kilowatt”, i.e. If the rated power of the motor is 10 kW, then the current consumed by it will be approximately 20 A.
For the motor shown in the figure, this ratio also holds (3.4 A ≈ 2 x 1.5). More accurate current values when using this ratio are obtained with motor powers of 3 kW and above.
When the electric motor is idling, a small current is consumed from the network (no-load current). As the load increases, the current consumption also increases. As the current increases, the heating of the windings increases. Large overload leads to the fact that the increased current causes overheating of the motor windings, and there is a danger of charring of the insulation (burning out of the electric motor).
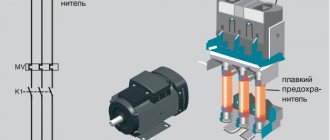
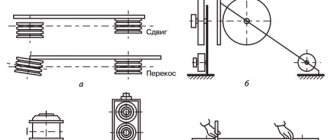
At the moment of starting from the network, the electric motor consumes the so-called starting current, which can be 3 to 8 times more than the rated current. The nature of the current change is presented on the graph (Fig. 2, a).
Rice. 2. The nature of the change in the current consumed by the motor from the network (a), and the effect of high current on voltage fluctuations in the network (b)
The exact value of the starting current for each specific engine can be determined by knowing the value of the starting current multiplicity - I start / I nom. The starting current multiplicity is one of the technical characteristics of the motor, which can be found in catalogs. The starting current is determined by the following formula: I start = I n x (I start / I nom). For example, with a rated motor current of 20 A and a starting current multiple of 6, the starting current is 20 x 6 = 120 A.
Knowing the actual value of the starting current is necessary for selecting fuses, checking the operation of electromagnetic releases during engine starting when selecting circuit breakers, and for determining the amount of voltage reduction in the network during startup.
The process of selecting fuses is discussed in detail in this article: Selecting fuses to protect asynchronous electric motors
A large starting current, for which the network is usually not designed, causes significant voltage drops in the network (Fig. 2, b).
If we take the resistance of the wires going from the source to the engine equal to 0.5 Ohm, the rated current I n = 15 A, and the starting current equal to five times the rated current, then the voltage loss in the wires at the time of starting will be 0.5 x 75 + 0, 5 x 75 = 75 V.
At the motor terminals, as well as at the terminals of nearby operating electric motors, there will be 220 - 75 = 145 V. Such a decrease in voltage can cause braking of operating motors, which will lead to an even greater increase in the current in the network and blown fuses.
In electric lamps, when the engines start, the heat decreases (the lamps “blink”). Therefore, when starting electric motors, they strive to reduce the starting currents.
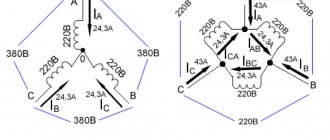
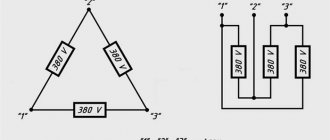
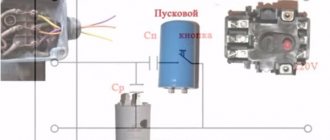
To reduce the starting current, a motor starting circuit can be used with switching the stator windings from star to delta. In this case, the phase voltage will decrease by √ 3 times and the inrush current will be limited accordingly. After the rotor reaches a certain speed, the stator windings switch to a delta circuit and the voltage on them becomes equal to the rated one. Switching is usually done automatically using a time or current relay.
Rice. 3. Scheme for starting an electric motor with switching the stator windings from star to triangle
It is important to understand that not every engine can be connected according to this scheme. The most common asynchronous motors with an operating voltage of 380/200 V, including the motor shown in Figure 1, will fail when switched on according to this circuit. Read more about this here: Selecting a motor phase connection diagram
Currently, to reduce the starting current of electric motors, special microprocessor-based soft start devices (soft starters) are actively used. For more information about the purpose of this type of device, read the article Why a soft start of an asynchronous motor is needed.
Source: electricalschool.info
DC motors
Based on Newton's principle of mechanics, which states that all motion is relative, a DC electric motor can be called a synchronous machine. Although the magnetic fields of the stator and rotor are stationary in it, the rotation of the shaft occurs due to the effect of repulsion of like poles of magnets and attraction of unlike poles.
Their position relative to each other is synchronized by a special device - a collector located on the rotor shaft. This is a copper ring divided into sectors by a dielectric. The ends of the rotor windings are connected to these sectors and create contact pairs.
They are supplied with direct current through carbon brushes. As the shaft rotates, poles switch between pairs. The stator magnetic field can be created by metals with residual magnetism or by the passage of current through the windings. The latter are used in high-power electric machines.
Their advantage is a high efficiency, up to 98%, as well as consistently high torque and low dependence on overloads. DC motors are excellent for driving lifting mechanisms, as well as for traction in electric vehicles.
They are very easy to control: to reduce the rotation speed, you just need to reduce the amount of applied voltage, and to reverse it, just change the polarity. The disadvantage is the complexity of the device and the low reliability of the brush assembly, its tendency to spark and be noisy. In addition, DC voltage is difficult to transmit over long distances, which is why there are no main lines of this type. You will have to create the power yourself, using rectifier or inverter circuits. You can also read about DC motors here.
Brushed motors
They are similar in design to DC motors. However, they are powered by single-phase alternating current. Their stator field winding is connected in series with the armature winding. The rotation of the shaft occurs due to the synchronous change of poles of the magnetic field in the stator and rotor windings.
The advantages listed above - high torque, insensitivity to overloads - also include the fact that this is the only AC electric machine that can be controlled without problems.
To change the shaft rotation speed, it is enough to reduce the supply voltage, and to reverse it, swap the connection points of the collector unit with the stator winding. Therefore, commutator motors are widely used in household electrical appliances.
For example, in washing machines, drills and other electrified tools. The disadvantages, the main of which is the complexity and low reliability of the brush assembly, include the inability to connect three-phase voltage. Simply because in this case there should be six brushes. This limits the maximum power of the motors: for single-phase machines at a voltage of 220 volts, this value does not exceed 2.5 kilowatts.
Asynchronous electrical machines
In them, the magnetic field of the rotor is a product of the rotating magnetic field of the stator. Since there is an air gap between these machine parts, energy transfer between them occurs with losses. Therefore, the phase of the current in the rotor lags behind the phase of the current in the stator by a small angle (no more than 100), which determines the value of the power factor cosφ. This lag is the reason why an electric machine of this type is called asynchronous.
Squirrel-cage motors
Their rotor winding is a set of metal rods that connect two rings. The resulting figure is called a “squirrel wheel”. At the moment voltage is applied to the stator winding, a short circuit current arises in the rotor, the energy of which is spent on unwinding the shaft and is thereby extinguished. It has a slightly lower efficiency than synchronous machines, it does not exceed 80%.
After gaining speed, it has a very stable torque on the shaft and can withstand overloads well. The main advantages of such engines are their simplicity and reliability, thanks to which they are very widespread. Disadvantages: complexity of management.
To change the rotation speed, it is necessary to change the frequency of the supply voltage or the number of stator windings, which determines the number of poles of the electromagnet - the more there are, the lower it is. Also, electric motors with a squirrel-cage rotor are characterized by a large starting current that overloads the network, as well as a sharp increase in torque when power is connected, which can cause damage to the drive gearbox.
Wound rotor motors
The start-up of high-power squirrel-cage asynchronous motors (more than 30 kW) is associated with extreme overload of the supply network. To eliminate this phenomenon, machines with a wound rotor are used, the winding of which consists of three coils connected by a star. Their ends are connected by carbon brushes to three slip rings located on the motor axis.
Unlike a DC motor commutator, they are not divided into sectors. When starting such a machine, a three-phase rheostat is used, the resistance of which is maximum at the moment of start-up. By gradually reducing the active resistance of the rotor, a smooth rotation of the electric motor shaft is achieved. When the nominal speed is reached, it is short-circuited.
By changing the rotor resistance, you can change the rotation speed. The advantage of a machine of this type is the absence of overload at the time of start-up and a smooth increase in torque. Therefore, it is used in lifting equipment. The disadvantage is the complexity of the device and lower efficiency than that of machines with a squirrel-cage rotor, it is no more than 60%.
In = Pн/(√3Uн x сosφ), kA
where Pn is the rated power of the engine, kW, Un is the network voltage, kV (0.38 kV). Power factor (cosφ) – engine nameplate values.
Rice. 1. Electric motor passport.
If the power factor of the motor is not known, then its rated current with a small error is determined by the ratio “two amperes per kilowatt,” i.e. If the rated power of the motor is 10 kW, then the current it consumes from the network will be approximately 20 A.
For the motor mentioned in the figure, this ratio also holds (3.4 A ≈ 2 x 1.5). More accurate current values when applying this ratio are obtained with electric motor powers of 3 kW and above.
When the electric motor is idling, a small current is consumed from the network (no-load current). As the load increases, the current also increases. As the current increases, the heating of the windings increases. Large overload leads to overheating of the motor windings, and there is a risk of failure of the electric motor.
When starting from the network, the electric motor consumes a starting current Istart, which is 3 to 8 times higher than the rated current. The characteristic of the current change is presented on the graph (Fig. 2, a).
Rice. 2. Characteristics of changes in the current consumed by the electric motor from the network (a), and the effect of high current on voltage fluctuations in the network (b)
actual value of the starting current for an electric motor is determined by knowing the magnitude of the starting current multiplicity - Istart/Inom. The starting current multiplicity is a technical characteristic of the engine, it is known from catalogs. The starting current is calculated according to the formula: I start = Ix. x (Istart/Inom).
Understanding the true value of the starting current is necessary for selecting fuses, checking the activation of electromagnetic releases during engine starting, when selecting circuit breakers, and for calculating the magnitude of the voltage drop in the network during start-up.
A large starting current causes a significant voltage drop in the network (Fig. 2, b).
If we take the electrical resistance of the wires laid from the source to the electric motor equal to 0.5 Ohm, the rated current Iн = 15 A, and the starting current Iп equal to five times the rated one, the voltage loss in the wires during starting will be 0.5 x 75 + 0.5 x 75 = 75 V.
At the terminals of the electric motor, as well as at the terminals of nearby operating electric motors, the voltage will be 220 - 75 = 145 V. This decrease in voltage causes braking of the operating electric motors, which entails an even greater increase in the current in the network and failure of the fuses.
In electric lamps, when electric motors start, the intensity decreases (the lamps “blink”). Therefore, when turning on electric motors, they strive to reduce starting currents .
To reduce the starting current, an electric motor starting circuit is used with switching the stator windings from star to delta.
Rice. 3. Scheme for starting an electric motor with switching the stator windings from star to delta.
It is of fundamental importance that not every engine can be switched on according to this scheme. Widespread asynchronous motors with an operating voltage of 220/380 V, including the motor shown in Figure 1, will fail when switched on according to this circuit.
To reduce the starting current of electric motors, special processor-based soft start devices (soft starters) are vigorously used.
Source: www.calc.ru