CHARACTERISTICS STARTING METHODS
Synchronous motors are alternating current machines that convert electrical energy into mechanical rotation of a drive shaft.
Their peculiarity is manifested in the synchronous interaction of the rotating EMF of a stationary stator with the electromagnetic field of a moving rotor.
To understand the principle of this interaction, it is important to familiarize yourself with the existing types of synchronous units and their structure.
DEVICE AND PRINCIPLE OF OPERATION OF A SYNCHRONOUS MOTOR
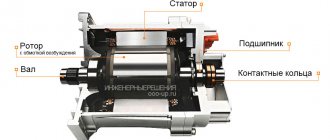
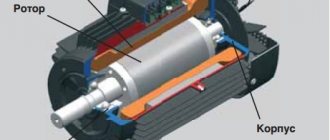
When considering the design of synchronous type motors, the following main parts are distinguished:
- cast unit body;
- fixed stator with a set of windings;
- movable rotor with drive shaft;
- contact-brush assembly.
The stator or armature of an electric motor is made of sheets of electrical steel, which makes it possible to enhance the magnetic fluxes created in it.
Working windings are placed in special grooves, creating a rotating magnetic field. In addition, the electric motor rotor is equipped with an excitation winding, which provides electromagnetic interaction with the rotating field of the stator.
When voltage is applied, its own electric field is formed in the moving unit, leading to rotation of the rotor with the drive shaft. Slip rings with a set of brushes are necessary to supply power to its windings.
The contact unit is not used in all models of synchronous electric motors (permanent magnets are installed on some rotors).
Rotor windings have two designs. The first is represented by samples with pronounced poles, and the second has coils of the distributed type (in this version they fit into the slots of the rotor). In addition, the described unit can be made in the form of a short-circuited turn (the so-called “squirrel cage”).
The difference – briefly in simple words
To put it briefly and in simple words, synchronous and asynchronous motors differ in the design of their rotors. From the outside, it is almost impossible to understand which electric motor is in front of you, except for the presence of additional cooling fins for asynchronous electric motors.
In a device operating on the synchronous principle, a winding with an independent voltage supply is provided on the rotor.
In an asynchronous motor, current is not supplied to the rotor, but is generated using a magnetic stator field. At the same time, the stators of both units are identical in design and have a similar function - creating a magnetic field.
Additionally, in a synchronous motor, the magnetic fields of the stator and rotor interact with each other and have equal speed.
Asynchronous units have short-circuited metal plates or contact rings in the rotor slots, which ensure a difference in the magnetic field of the rotor and stator mechanism by the amount of sliding.
Despite its apparent simplicity, it is unlikely that it will be possible to deal with this issue right away, so we will consider the issue in more detail. Let's talk about the features and differences between asynchronous and synchronous machines.
Motor protection at start
The synchronous motor delay protection system is designed to reduce the negative impact of excessively high torque that occurs when the motor starts up. The reason for the occurrence of large torque values is insufficient excitation or its absence in the electric motor during start. The protection scheme provides for the use of:
- zero current relay, which controls the current load during excitation;
- a time relay that counts the duration of a normal start.
The protection system for a synchronous motor against prolonged starting is triggered when the excitation current in the electric motor has not reached a sufficient level within the time corresponding to a normal start. In this case, the protective system against a delayed start interrupts the switching process by turning off the power to the stator. Such a protection circuit belongs to the category of special functions of electric drives, simultaneously with protection against electrical winding breakage, overspeed, overvoltage, etc.
Synchronous motor (SM)
A synchronous motor is a unit with an individual rotor design and a permanent magnet inductor. It features improved characteristics of power, torque and inertia. It has a number of design features and operating principles.
Device
Structurally, it consists of two elements: a rotor (rotates) and a stator (fixed mechanism). The rotor assembly is located inside the stator, but there are designs where the rotor is located on top of the stator.
The rotor contains permanent magnets characterized by increased coercive force.
Structurally, LEDs are divided into two types according to their poles:
- Implicitly expressed. They differ in the same inductance along the transverse and longitudinal axes.
- Explicitly expressed. Transverse and longitudinal inductance have different parameters.
Structurally, rotors come in different designs and designs.
In particular, magnets are:
- Outdoor installation.
- Built-in.
The stator conventionally consists of two components:
- Casing.
- Core with wires.
The winding of the stator mechanism is of two types:
- Distributed. Its difference lies in the number of slots per pole and phase. It ranges from two or more.
- Focused. There is only one number of grooves per pole and phase, and the grooves themselves are distributed evenly over the surface of the stator part. The pair of coils that form the winding can be connected in parallel or in series. The disadvantage of such windings is the impossibility of influencing the EMF line.
The form of electromotive force of an electric synchronous motor is in the form:
- Trapeze. Characteristic of devices with a pronounced pole.
- Sinusoids. It is formed by bevelling the tips on the poles.
Generally speaking, a synchronous motor consists of the following elements:
- assembly with bearings;
- core;
- sleeve;
- magnets;
- armature with winding;
- sleeve;
- “plate” made of steel.
Principle of operation
First, direct current is supplied to the field windings. It creates a magnetic field in the rotor part. The stator of the device contains a winding to create a magnetic field.
As soon as a variable current is applied to the stator winding, a torque is created according to Ampere's law, and the rotor begins to rotate at a frequency equal to the frequency of the current in the stator assembly. In this case, both parameters are identical, which is why the motor is called synchronous.
Rotary EMF is formed thanks to an independent power source, which allows you to change the speed and not be tied to the power of connected consumers.
Taking into account the peculiarities of operation, a synchronous electric motor cannot start on its own when connected to a three-phase current source.
Scope of application
The synchronous type electric motor has a wide range of applications due to its constant rotation speed.
This feature expands the scope of its application:
- energy: sources of reactive power to maintain voltage, maintaining network stability during emergency sags;
- mechanical engineering, for example, in the manufacture of guillotine shears with high impact loads;
- other areas - rotation of powerful compressors or fans, generators at power plants, ensuring stable operation of pumping equipment, etc.
Frequency switching
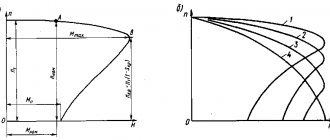
Frequency starting of a synchronous motor is performed using reduced voltage with a low current frequency. This is possible if there is a power source capable of adjusting the frequency to the required parameters. In this case, the speed of the magnetic flux will also be low, and the poles of the rotor assembly will rotate with it.
As the speeds become the same, the starting frequency of the supply current is gradually increased, accelerating the rotor to the nominal value. This starting method is considered soft, providing a smooth start. Its disadvantage is the need for a power source of adjustable frequency and voltage.
Modern frequency starting of a synchronous motor is implemented on the basis of circuits based on semiconductor elements - thyristor converters. They reduce the nature of the voltage change, practically without changing the effective value. This method of starting in automation systems provides a reduction in acceleration time, which has a positive effect on the performance of automated systems, but at the same time requires a more complex switching circuit.
Asynchronous motor (IM)
An asynchronous (induction) electric motor having a different frequency of rotation of the magnetic field in the stator and rotor speed. Depending on the type and settings, it can operate in motor or generator mode, XX mode or electromagnetic brake.
Design features
Structurally, asynchronous mechanisms are difficult to distinguish from synchronous ones. They also consist of two main units: a stator and a rotor. In this case, the rotor assembly can be phase or short-circuited. But there are still minor design differences.
Let's look at what an asynchronous motor consists of:
- core;
- fan with housing;
- bearing;
- terminal box;
- triple winding;
- slip rings.
With this in mind, one of the main differences is the absence of windings on the armature (the exception is phase IM). Instead of a winding, the rotor contains rods short-circuited with each other.
Self-excitation conditions
Auto-excitation of a synchronous motor with parallel field windings can occur if:
- There is a residual magnetic flux of the poles.
- Correct connection of the ends of the exciter winding or the correct direction of rotation.
For automatic stimulation to occur, it is enough that the residual flow is 2-3% of the nominal one. An atavistic stream with such indicators is always present in an already activated mechanism. But if magnetization has stopped, then you need to pass current from an external source through the excitation winding.
When the necessary rules have already been met, a small EMF, which is induced in the stator by a flow of magnetic particles, causes a small current to appear in the exciting winding, causing an increase in the movement of the poles. This process continues until the electrical power of the generator reaches a certain value.
To achieve normal functioning of electrical appliances, it is necessary to have a stable electrical voltage at the compensator terminals, which does not depend on changes in the overall traction. This can be solved by adjusting the settings.
Rheostats may well close the winding, but if this does not happen, then the electromotive force of self-induction increases, which may well damage the insulating material. During a short circuit, the energy spreads as heat, and then the generator is not destroyed.
Here it is not worth using external power, since the electromagnet contained in the core self-excites the parallel windings. To increase the residual magnetism in the exciter coils, the cores are made of cast steel.
In the process of sequential self-excitation, a current is generated that does not differ from the power of the directed particles of the generator. At idle, the load is zero and there is no excitation. It is impossible to remove or adjust these parameters.
To start stimulation, you need to connect an external load source to the clamps of the device. This is precisely the drawback of the series-connected windings. This is only used for devices that have a constant load.
With mixed self-excitation, the voltage vibration at the designated traction force is softened. This is the main advantage of such devices, but the design is quite complex, and as a result, a bit expensive. Engines of this type cannot tolerate short circuits.
Comparison of synchronous and asynchronous motors
In conclusion, we can summarize what are the main differences between asynchronous (AM) and synchronous (SD) motors.
Let's highlight the basic points:
- The rotor of asynchronous motors does not require current supply, and the induction at the poles depends on the stator magnetic field.
- The IM revolutions under load lag by 1-8% from the rotation speed of the stator field. In SD, the number of revolutions is the same.
- The “synchronizer” has an excitation winding.
- Structurally, the rotor of an SD is a magnet: permanent, electric. In IM, the magnetic field in the rotor mechanism is induced using induction.
- A synchronous machine does not have a starting torque, so an asynchronous start is needed to achieve synchronization.
- “Synchronizers” are used in cases where it is necessary to ensure continuity of the production process and there is no need for frequent restarts. IMs are needed where high starting torque is required and frequent stops occur.
- The LED needs an additional current source.
- “Asynchronous” wear out more slowly, because in their design there are no slip rings with brushes.
- As a rule, blood pressure is characterized by a non-round number of revolutions, while SD is characterized by a rounded number.
Inclusion methods
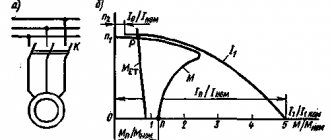
Based on the fact that direct starting is impossible, the inclusion of a synchronous motor in the work process is carried out with the implementation of additional measures. Regardless of the methods of starting an electric drive, the essence of each is to first set the moving part in motion at speeds close to the frequency of the main field.
When starting, the flux moves so slowly relative to the magnetic centers of the rotating shaft that when the exciting electrical winding is connected to the power source, a magnetic connection is established between the rotor poles and the stator field. It is this that ensures the occurrence of the same electromagnetic moment. Under its action, the electric motor shaft is pulled into synchronism.
There are several ways to start synchronous motors. Three of them have received practical application:
- through auxiliary electrical equipment;
- asynchronous, including autotransformer and reactor starting;
- frequency starting of a synchronous motor.
Each synchronous motor starting scheme has its own advantages and disadvantages regarding the complexity of the design and technical design, financial costs, and dimensions of the drive units. Therefore, where, for example, a reactor start-up would be optimal, it would be wiser not to use the more expensive frequency start-up. Which method is optimal depends on many factors.
Starting and stopping a synchronous motor must be carried out in compliance with a certain sequence of actions and conditions. Therefore, to reduce the risk of failure of the electric drive at the start, a system is provided to protect the synchronous motor from prolonged activation. And at the stopping stage, the following algorithm is observed:
- reduce the excitation current to a value equal to the minimum current parameters of the stator;
- turn off the stator assembly;
- open the exciting electrical circuit.
Deviation from this sequence is fraught with a jump in current values in the stator, overvoltages and, as a result, a violation of the integrity of the insulation.
About reactive power
Synchronous electric motors generate and simultaneously consume reactive power. The features and parameters of the “reagent” depend on the current in the exciting winding. At full load, the cosine of Phi is equal to 1. In this mode, the LED does not consume “reagent” from the network, and the current in the stator winding is minimal.
It is important to understand here that reactive power degrades the parameters of the power system. A large parameter of inactive currents leads to increased fuel consumption, increased losses and decreased voltage.
In addition, the “reagent” loads electricity transmission lines, which leads to the need to increase the cross-section of cables and wires, and, accordingly, increase capital costs.
Today, one of the main tasks of power engineers is reactive power compensation. Its main consumers include IM, which consumes 40% of the “reagent,” electric furnaces, converters, power lines and power transformers.
Functional modes
The bulk of synchronous electric motors are equipped with a reversible option. They can be used for different purposes, and the existing two modes differ in different methods of transferring actions to the machine. A synchronous electric motor operates according to the following regulations:
- Generator mode
- Synchronous compensator
- Engine mode
In the first option, electric motors are used, equipped with phase windings located on the stator. This greatly simplifies the process of transferring performance to the power grid. Current generation is carried out under the action of the electromagnetic field of the excitatory winding of the generator with stator windings.
In the second case, when idling, the unit takes enormous power from the network. In practical implementation, this mode is used to improve the performance index or to stabilize the mains voltage parameters.
The third mode manifests itself when operating three-phase electrical voltage is transferred to the stator windings. Next, the armature electromagnetic field begins to push the magnetic field of the inductor, and the shaft begins to rotate. But in reality, the engine mode is not so simple, since powerful units fail to achieve speed indicators, then methods and connection diagrams were invented for starting.
How to choose: useful tips
Finding a synchronous electric motor on the market is not a problem, but often the operation of the device depends on the correct choice. Therefore, when purchasing a unit, you should adhere to the following rules:
- How to operate the motor. Based on this criterion, the type of engine is selected - open, closed, protected. Protection can be from moisture, temperature and the influence of an aggressive environment. But there are also special means with which you can avoid sparks in the motor.
- How is the motor connected to the consumer?
By paying attention to these points, you can choose a real synchronous electric motor without any problems.
Manufacturers
Companies that manufacture synchronous electric motors can be divided into:
- Russian
- Near abroad
- Far abroad.
Among the domestic manufacturers of such products are the Armavir Electrical Equipment Plant, the Baranchinsky Electromechanical Plant, the Vladimir Electric Motor Plant, VNITI EM, EVI, IOLLA, the Elektrodvigatel enterprise from Krasnogorsk, the Voronezh MEL and other production facilities located in Russian cities.
In the near abroad, electric motors with a synchronous circuit are produced at the Belarusian “Electrodvigatele” and Polesyeelectromash, the Ukrainian “Ukrelectromash”, “Elektromashina”, “Electromotor”, “Electrotyazhmash” and the Moldavian “Electromash”.
In foreign countries, the leading companies are the American Ametek, Emerson Electric Corporation, General Eletric, Johnson Electric Holdings Limited, Regal Beloit Corporation, the German Baumueller, Liebherr, Nord, Rexrot Bosch Group, Siemens AG, the Slovenian Domel, the Swiss ABB Limited, Maxon Motor, the Japanese Nidec Corporation and Brazilian WEG.
Where can I buy
Different types of synchronous motors are offered at different sites. These include specialized stores selling such products, and people who previously used these motors and decided to sell them as unnecessary.
It is worth paying special attention to online stores. These platforms have recently gained wide popularity and offer a fairly wide range of different engines with a synchronous interaction scheme.
But you can also point to sites that also have used motors purchased at various auctions abroad. Their quality is usually very good, despite some minor wear. But when choosing a product, it is better to use recommendations.