There are several ways to control a frequency converter. During the operation of the inverter, the following functions are monitored operationally:
Start - Stop
(Start – Stop).
Control of the start of rotation and braking of the connected motor. Setting the speed.
Setting the operating speed of the drive.
Emergency Stop.
Emergency removal of power supply, work permission signal.
These changes in the operation of the inverter are made by sending signals from external devices or from the control panel. The remaining parameters can be controlled exclusively from the control panel, some of which are only active when the engine is switched off.
Control methods can be as follows
:
- control using the keyboard (control panel) of the frequency converter
- control via remote control
- analog input (change the current engine speed)
- discrete inputs (changing various states and parameters of the converter)
- serial interface RS-485 or its equivalent
Let's look at converter control using the Prostar PR6000 inverter as an example.
Control via analog input
The PR6000 frequency converter has two analogue inputs – AI1 and AI2. This sets it apart from other models with one analog input.
Input AI1 can be used for voltage control with an input impedance of 47 kOhm. Input AI2 has a choice, which is made by a switch: current input with an input resistance of 500 Ohms, or voltage input.
How to choose
For manufacturers of frequency converters and other electronic equipment, the main tool for conquering the market is price. In order to reduce it, they create devices with a minimum set of functions. Accordingly, the more versatile a particular model, the higher its price. For us, this is of great importance for the reason that for efficient and long-term operation of the engine, an inverter with certain functions may be required. Let's look at the main criteria you should pay attention to.
Control
According to the control method, frequency converters are divided into vector and scalar. The former are much more common today, but have a higher price compared to the latter. The advantage of vector control is its high control accuracy. Scalar control is very simple, it can only keep the ratio of output voltage and frequency at a given value. It is advisable to install such a converter on a small device without a high load on the motor, for example, a fan.
Power
Of course, the higher this value, the better. By the way, in this matter the numbers are not so important. Pay more attention to the company - your equipment to each other, the more efficiently it will work. In addition, the use of multiple converters from the same brand supports the principle of interchangeability and ease of maintenance. Consider whether there is an appropriate service center in your city.
Mains voltage
In this case, the same principle applies as in the previous section - the wider the operating voltage range, the better for us. Domestic electrical networks, unfortunately, are poorly familiar with the concept of “standard”, so it is better to protect the equipment as much as possible from possible surges. A voltage drop is unlikely to lead to serious consequences (the converter will most likely simply turn off), but a large increase is dangerous - it can damage the device as a result of the explosion of electrolytic network capacitors.
Frequency adjustment range
In this case, you should rely solely on the requirements of production and specific devices. For example, for equipment such as grinding machines, the maximum frequency value (from 1000 Hz) is important. The standard lower limit is considered to be a ratio of 1 to 10 relative to the upper limit. In practice, converters with a range from 10 to 100 Hz are most often used. Please note that only converter models with vector control have a wide adjustment range.
Control inputs
Discrete inputs are used to transmit control commands in converters. They are used to start the engine, stop it, brake it, reverse it, etc. Analog inputs are used for feedback signals that monitor and adjust the drive directly during operation. And digital ones are used to transmit high-frequency signals generated by encoders (rotation angle sensors).
In fact, the more inputs, the better, but a large number of them not only makes setting up the device difficult, but also increases its cost.
Number of output signals
The discrete outputs of the converter are necessary to output signals indicating the occurrence of problems, such as overheating of the device, deviation of the input voltage from the norm, accident, error, etc. Analog outputs are needed to provide feedback in complex systems. The principle of choice is the same: look for a balance between the number of signals and the cost of the device.
Control bus
The connection diagram for the frequency converter will help in finding a suitable control bus - the number of outputs and inputs should be at least equal, but it is better to buy a bus with a small margin - this will make it much easier for you to further improve the device.
Overload capabilities
It is considered normal if the power of the frequency converter is 10-15% higher than the engine power. The current should also be slightly higher than the motor rating. However, such selection “by eye” is recommended only in cases where there is no necessary technical documentation for the engine. If available, carefully read the requirements and select the appropriate converter. If shock loads are important, the peak current of the inverter should be 10% greater than the specified value.
Control via digital inputs
The PR6000 converter has 8 discrete (digital) inputs: FWD (forward/stop), REW (reverse/stop) and 6 inputs DI1…DI6.
The FWD and REW inputs can operate in two- and three-wire mode, with the third wire being programmed on one of the inputs DI1…DI6. The speed control mode selection is set in parameter P077.
Digital inputs DI1...DI6 are multifunctional; they are programmed for different functions, which are launched when the corresponding input is activated.
Possible functions: multi-speed selection, acceleration/deceleration selection, forward/reverse JOG operation, stop control, frequency increase/decrease, fault alarm input, start pause, three-wire start/stop control, DC braking , error/message reset, sweep frequency operation, counter enable/reset/input. In total, you can select up to 20 different parameters, which are set in parameters P071...P076 for each input. Activation of discrete inputs occurs by short-circuiting the desired input to the COM terminal. Moreover, this can be done in different ways - via the controller output, relay contacts, sensor or manual button. The digital and analog inputs are shown below.
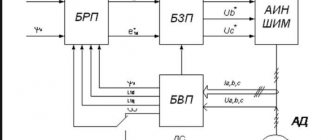
Serial control
When operating via the RS-485 interface, the frequency converter is controlled by a controller or a personal computer through a special RS-485/RS-232 converter adapter.
Through this interface, the converter can not only receive commands to change parameters and state, but also provide information about its current state to other devices. Also, communication with other converters can be supported via the RS-485 interface.
Next, we’ll talk about methods for operational control of inverter modes.
Are losses inevitable?
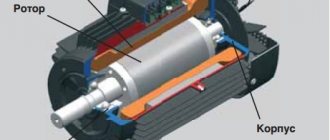
Let us dwell in more detail on the electrical losses that occur in an asynchronous electric motor.
The operation of an electric drive is characterized by a number of electrical and mechanical quantities.
Electrical quantities include:
- mains voltage,
- motor current,
- magnetic flux,
- electromotive force (EMF).
The main mechanical quantities are:
- rotation speed n (rpm),
- rotating torque M (N•m) of the engine,
- mechanical power of the electric motor P (W), determined by the product of torque and rotational speed: P=(M•n)/(9.55).
To denote the speed of rotational motion, along with the rotation frequency n, another quantity known from physics is used - the angular velocity ω, which is expressed in radians per second (rad/s).
There is the following relationship between the angular velocity ω and the rotation frequency n: when taken into account, the formula takes the form:
The dependence of the engine torque M on the rotational speed of its rotor n is called the mechanical characteristic of the electric motor. Note that when an asynchronous machine operates, the so-called electromagnetic power is transmitted from the stator to the rotor through the air gap using an electromagnetic field: Part of this power is transmitted to the rotor shaft in the form of mechanical power according to expression (2), and the rest is released in the form of losses in active resistances of all three phases of the rotor circuit.
These losses, called electrical, are equal to:
Thus, electrical losses are determined by the square of the current passing through the windings.
They are largely determined by the load of the asynchronous motor. All other types of losses, except electrical ones, change less significantly with load.
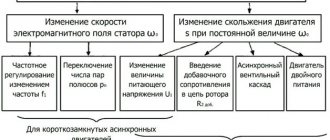
Therefore, let us consider how the electrical losses of an asynchronous motor change when the rotation speed is controlled.
Electrical losses directly in the rotor winding of an electric motor are released in the form of heat inside the machine and therefore determine its heating. Obviously, the greater the electrical losses in the rotor circuit, the lower the efficiency of the engine, the less economical its operation.
Considering that stator losses are approximately proportional to rotor losses, the desire to reduce electrical losses in the rotor is even more understandable. That method of regulating the engine speed is economical, in which the electrical losses in the rotor are relatively small.
From the analysis of the expressions it follows that the most economical way to control motors is at a rotor speed close to synchronous.
Engine start/stop
Starting and stopping the engine can be done in the following ways.
- From the control panel of the frequency converter. To do this, use the RUN, STOP/RESET buttons. If a short-term start is needed, the JOG button is used.
- By supplying a signal to the discrete inputs FWD, REW with two-wire control. For three-wire control, you need to enable one of the discrete inputs DI1...DI6 and program it accordingly. The mode is selected by parameter P077. Any of these inputs can also be used for pulse triggering (JOG command). With two-wire control, a constant signal is required at the appropriate inputs for the motor to operate. With a three-wire, a short-term signal is sufficient.
- Via a serial interface using commands from the controller. The source of the Start/Stop command in the Prostar PR6000 inverter is selected in parameter P006.
Two wire start/stop control
Three wire start/stop control
Frequency control
The inverter can control speed in several ways depending on the specific equipment.
- Speed control using a variable resistor installed on the keyboard (control panel) of the inverter.
- Discrete change using the Up/Down control panel keys.
- Discrete change using contacts (any two) connected to inputs DI1…DI6. When the corresponding discrete input is activated, the speed decreases or increases within specified limits with a specified step. Note. In options 2 and 3, when the power is turned on, the engine starts at the frequency set in parameter P005. During operation, the frequency can be quickly changed. If the changed frequency value needs to be remembered, parameter P155 is used.
- Speed setting using analog voltage or current signals supplied to inputs AI1, AI2. Analog signals can be combined in different ways.
- Setting in accordance with the pulse frequency at input DI6.
- Via RS-485 interface from the controller. The frequency control channel is selected using parameter P004. The upper and lower operating frequencies are set in parameters P009 and P010. The speed of the engine in pulse (jog) mode JOG is set by parameter P052.
A frequency converter
- GOST R 50369-92 Electric drives. Terms and Definitions.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.: International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, “High-Performance Motor Drives,” IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.
Phase voltage of a three-level converter with a fixed neutral point
A fixed neutral point converter can be scaled to achieve more than three output levels by dividing the DC link voltage by more than two values using capacitors. Each of these divided voltages can be connected to a load using an extended set of switches and clamping diodes. Along with increased power, the advantages of a multilevel converter are better power quality, lower voltage slew rate (dv/dt) and associated electromagnetic interference. However, when a converter with a coupled neutral point has more than three levels, other problems arise. From a circuit design point of view, in this case, clamping diodes require a higher maximum operating voltage than the main switches, which requires the use of different technologies or several clamping diodes connected in series. In addition, the uneven use of power elements in the circuit becomes critical. As a result, due to an increase in the number of elements, reliability decreases. These disadvantages limit the use of fixed neutral point converters with more than three levels in industrial applications.
Multilevel converters
Cascade converters based on modular H-bridge (CHB) power cells and flying capacitor converters have been proposed to provide more output voltage levels than fixed-neutral point converters.
Cascade H-bridge converter
Cascade converter
is a highly modular inverter consisting of several single-phase inverters, usually called power cells, connected in series to form a phase. Each power cell is made of standard low-voltage components, which ensures easy and cheap replacement in case of failure.
Cascade converter circuit
The main advantage of this converter is the use of only low-voltage components, while it makes it possible to control powerful loads in the medium voltage range. Although the switching frequency in each cell is low, the equivalent switching frequency applied to the load is high, which reduces switching losses, gives low voltage slew rate (dv/dt) and helps to avoid resonances.
Phase voltage of cascade converter
Floating Capacitor Converter
The output voltage of a floating capacitor converter is obtained by directly connecting the phase output to the positive, negative bus or connecting through capacitors. The number of output voltage levels depends on the number of pad capacitors and the relationship between the different voltages.
Converter circuit with floating capacitors
This converter, like the cascade converter, also has a modular topology, where each cell consists of a capacitor and two connected switches. However, unlike a cascade converter, adding additional power switches to a capacitor converter does not increase the rated power of the converter, but only reduces the voltage slew rate (dv/dt), improving the harmonic distortion of the output signal. Like a cascade converter, modularity reduces component replacement costs, makes it easier to support, and allows for fault-tolerant operation.
Phase voltage of converter with floating capacitors
A capacitor converter requires only one DC source to power all cells and phases. Therefore, an input transformer can be dispensed with, and the number of cells can be arbitrarily increased depending on the required output power. Similar to the fixed neutral point converter, this converter requires a special control algorithm to regulate the voltage across the capacitors.
Current inverter
To operate, a current inverter always requires a controlled rectifier to provide constant current to the DC link. The standard topology typically uses thyristor rectifiers. To reduce noise in the load, split inductance is used in the DC link. The current inverter has a power switch circuit similar to a voltage inverter, but uses integrated control thyristors (IGCTs) as the power switches. The output current is in the form of PWM and cannot be directly applied to an inductive load (motor), so the current inverter necessarily includes an output capacitive filter that smoothes the current and outputs a smooth voltage to the load. This converter can be implemented for medium voltage operation and, moreover, it has the ability to regenerate energy
.
Current inverter circuit with rectifier
Direct converters
Direct converters transfer energy directly from input to output without the use of energy storage elements. The main advantage of such converters is their smaller dimensions. The disadvantage is the need for a more complex control scheme.
Cycloconverter
belongs to the category of direct converters. This converter has been widely used in applications requiring high power. This converter consists of dual thyristor converters per phase, which can generate a variable DC voltage controlled to follow a reference sinusoidal signal. The input of each converter is powered by a phos-shifting transformer, where low-order harmonics of the input current are eliminated. The output voltage is the result of a combination of input voltage segments in which the fundamental follows the reference signal. By its nature, this converter is well suited for driving low-frequency, high-power loads.
Cycloconverter circuit
Matrix converter
in its direct and indirect versions also belongs to the category of direct transformers.
The basic operating principle of a direct matrix converter
is the ability to connect the output phase to any of the input voltages. The converter consists of nine bidirectional switches that can connect any input phase to any output phase, allowing current to flow in both directions. To improve the input current, a second-order inductive-capacitive filter is required. The output is directly connected to an inductive load. Not all available key combinations are possible, they are limited to only 27 valid switching states. As mentioned earlier, the main advantage of matrix converters is their smaller size, which is important for automotive and aviation applications.
Direct matrix converter circuit
Indirect matrix converter
(indirect matrix converter) consists of a bidirectional three-phase rectifier, a virtual DC link and a three-phase inverter.
The number of power semiconductors is the same as for direct matrix converters (if a bidirectional switch is treated as two unidirectional switches), but the number of possible turn-on states is different. Using the same indirect matrix converter configuration, it is possible to simplify its topology and reduce the number of elements by limiting its operation to positive voltage in the virtual DC link. The reduced topology is called matrix converter
.
Indirect matrix converter circuit
Sparse matrix converter circuit
Bibliography
Emergency stop of the inverter
In addition to a regular stop, the Stop function with a specified deceleration uses two methods of emergency stopping the engine and turning off the inverter.
- Emergency stop by power interruption. To do this, manufacturers recommend installing a three-phase linear contactor before powering the inverter, the power supply of the coil depends on the state of the emergency circuit of all equipment. When you press the “Emergency Stop” button or in another emergency, the power to the contactor is turned off and the voltage from the inverter is removed. This will ensure that the engine stops.
- The function of discrete input DI1…DI6 “External device fault alarm” is used. If you program the desired input for this function, the inverter will stop if an alarm occurs.
Other useful materials:
Subtleties of setting up a frequency converter FAQ on electric motors Setting up a frequency converter to operate on multiple motors Purpose and types of encoders