Basic parameters of the electric motor
- Motor power
- Rated speed
- Efficiency
- Motor torque
- Rotor moment of inertia
- Rated voltage
- Electrical time constant
Motor power
Motor power is the useful mechanical power at the motor shaft.
Mechanical power
Power is a physical quantity that shows how much work a mechanism does per unit of time.
- where P
– power,
W
, - A
– work,
J
, - t
—time,
s
Work is a scalar physical quantity equal to the product of the projection of force and direction F
and the path
s
traversed by the point of application of the force.
- where s
– distance,
m
For rotational movement
- where θ – angle, rad
- where ω – angular frequency, rad/s
,
In this way, you can calculate the value of mechanical power on the shaft of a rotating electric motor
Reference: Nominal value is the value of a parameter of an electrical product (device), specified by the manufacturer, at which it should operate, which is the initial value for calculating deviations.
Rotation frequency
- where n
is the rotation speed of the electric motor,
rpm
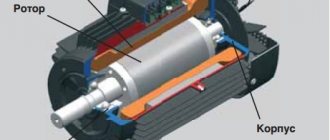
Rotor moment of inertia
The moment of inertia is a scalar physical quantity, which is a measure of the inertia of a body in rotational motion around an axis, equal to the sum of the products of the masses of material points by the squares of their distances from the axis
- where J
is the moment of inertia,
kg∙m2
, - m
—mass,
kg
Reference: In the English system of measures, the moment of inertia is measured in ounce-force-inch (oz∙in∙s2) 1 oz∙in∙s2 = 0.007062 kg∙m2 (kg∙m2)
The moment of inertia is related to the moment of force by the following relation
- where ε – angular acceleration, s-2
Reference: Determination of the moment of inertia of the rotating part of the electric motor is described in GOST 11828-86
Electric motor efficiency
The efficiency of an electric motor is a characteristic of the machine’s efficiency in converting electrical energy into mechanical energy.
- where η is the efficiency of the electric motor,
- P1
- supplied power (electric),
W
, - P2
- useful power (mechanical),
W
- Wherein
losses in electric motors
- due to:
- electrical losses - in the form of heat as a result of heating current-carrying conductors;
- magnetic losses - losses due to magnetization reversal of the core: losses due to eddy currents, hysteresis and magnetic aftereffects;
- mechanical losses - friction losses in bearings, ventilation, brushes (if any);
- additional losses - losses caused by higher harmonics of magnetic fields arising due to the gear structure of the stator, rotor and the presence of higher harmonics of the magnetomotive force of the windings.
Electric motor efficiency can vary from 10 to 99% depending on the type and design.
The International Electrotechnical Commission defines the efficiency requirements for electric motors. According to the IEC 60034-31:2010 standard, four efficiency classes are defined for synchronous and asynchronous motors: IE1, IE2, IE3 and IE4.
Rated voltage
Rated voltage is the voltage for which the network or equipment is designed and to which their operating characteristics are related.
Electrical time constant
The electrical time constant is the time, counted from the moment a direct voltage is applied to the electric motor, during which the current reaches a level of 63.21% (1-1/e) of its final value.
- where is the time constant, s
Motor torque
Torque (synonyms: torque, torque, moment of force) is a vector physical quantity equal to the product of the radius of the vector drawn from the axis of rotation to the point of application of the force and the vector of this force.
- where M
– torque,
Nm
; - F
– force,
N
; - r
– radius vector,
m
Help: Nominal torque Mnom, Nm, is determined by the formula
- where Pnom
is the rated power of the engine,
W
, - nnom
- rated speed,
min-1
Initial starting torque is the torque of the electric motor at start-up.
Help: In the English system of measures, force is measured in ounce-force (oz, ozf, ounce-force) or pound-force (lb, lbf, pound-force) 1 oz = 1/16 lb = 0.2780139 N (N) 1 lb = 4.448222 N (N)
torque is measured in ounce-force per inch (oz∙in) or pound-force per inch (lb∙in)
1 oz∙in = 0.007062 Nm (Nm) 1 lb∙in = 0.112985 Nm (Nm)
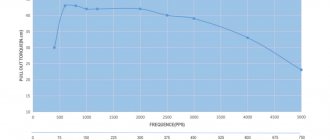
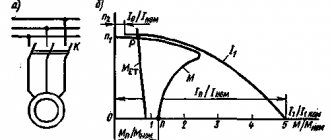
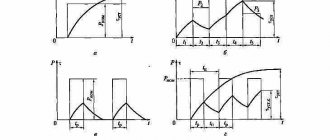
Mechanical characteristics
The mechanical characteristic of the engine is a graphically expressed dependence of the shaft speed on the electromagnetic torque at a constant supply voltage.
Great Encyclopedia of Oil and Gas
Attitude - maximum moment
The coefficient I, which characterizes the ratio of the maximum torque to the nominal torque, is called the overload capacity of the engine.
For asynchronous motors with a squirrel-cage rotor, usually I. [17] Kp is the overload factor equal to the ratio of the maximum motor torque to its rated value (if there is a safety device, Ki depends on the moment at which this device operates); am—yield strength of the material; [ sj is the permissible safety factor for the yield strength. [18]
Here UIN is the rated torque of the engine; § — ratio of maximum torque to nominal; / s - network frequency (usually 50 Hz); SK—critical slip; Od is the nominal angular speed of the motor. [19]
At what rotational speed does an asynchronous motor develop maximum torque, if the ratio of the maximum torque to the rated torque is Mt / Mn 2 2, and the rated rotational speed of a six-pole motor at a network frequency of 50 Hz is 983 rpm. [20]
On lifting machines, crane electric motors are installed that have a significant overload capacity - the ratio of the maximum torque to the nominal one. At low powers, electric motors of general industrial types are sometimes used. [21]
The resulting formula for calculating the maximum torque allows you to roughly estimate the size of the electric motor in relation to the maximum torque, without resorting to a full calculation, since 2R] and 22 included in the formula change relatively within small limits. When moving from one number of poles to another, the dissipation coefficient changes somewhat more, which increases with the number of poles. An increase in the dissipation coefficient with an increase in the number of poles causes an increase in the induction in the stator teeth with a larger number of poles with the same induction in the air gap. [22]
The three-phase synchronous electric motor of the SDN series, type SDN 14 - 49 - 6, has the following nominal data: active power on the shaft PZHOM 100 kW, number of pole pairs p 3, ratio of the maximum torque to the rated torque Mmax / L (io 2 0, rotation speed pyaop 1000 rpm / min, supply voltage frequency / 50 Hz [23]
As a result, the maximum torque in the motor and generator modes is not the same. The ratio of the maximum torque to the nominal Mmax is called the overload capacity. [25]
In this regard, the largest moment Mmall is called overturning. One of the important performance characteristics of an asynchronous motor is the ratio of the maximum torque to the rated torque kmax Afmax / MHOM, which is called the overload capacity. [26]
Asynchronous electric motors with a phase rotor are used to drive mechanisms with a high starting torque or when the starting current is limited. The ratio of the maximum torque to the nominal torque is 1 8 - 3 0 Electric motors with a phase rotor are manufactured with brushes raised after starting; in the presence of starting rheostats and with permanently adjacent brushes. [27]
The most complex oscillatory processes occur in the suspension and transmission of a car. For example, the load mode of a car transmission depends on both the rigidity of the system and the gear ratios. Let us introduce the concept of the dynamic coefficient & dyne, which is the ratio of the maximum torque arising on the axle shafts of the car to the torque L1calc defined above, calculated from the maximum engine torque Metax according to the speed characteristic. [28]
Asynchronous motors with a wound rotor are used to drive winches, pumps and rotors. These motors are controlled using special stations that smoothly start the motor with a low starting current. Technical characteristics of asynchronous motors of the winch, pumps and rotor of domestic drilling rigs are given in Table. 23.5. The rated power indicated in the table corresponds to continuous operation, in which the engine does not overheat above the set temperature. The moment Mn corresponding to the nominal mode is called the nominal moment. The ratio of the maximum torque Mm to the nominal Mn characterizes the overload capacity of the engine. The starting torque multiplicity is determined by the ratio of the torque developed by the engine at a standstill to the rated torque. [29]
If the engine continues to be overloaded further, then, as can be seen from the characteristics, the torque developed by the engine will already decrease and become less than the load resistance moment. The engine will not be able to overcome the load, it will quickly slow down and stop. Allowing such an overload is dangerous for the engine. It follows that the overload properties of the engine are determined by the maximum torque, and they are usually characterized by the ratio of the maximum torque to the nominal one. [thirty]
Application areas of electric motors
Electric motors are the largest consumers of electricity in the world, accounting for about 45% of all electricity consumed.
- Electric motors are used everywhere, the main areas of application are:
- industry: pumps, fans, compressors, conveyors, driving force for other machines, etc.
- construction: pumps, fans, conveyors, elevators, heating, ventilation and air conditioning systems, etc.
- consumer devices: refrigerators, air conditioners, personal computers and laptops (hard drives, fans), vacuum cleaners, washing machines, mixers, etc.
| ED1 | Functions | Areas of use |
| Rotating electric motors | Pumps | Water supply and wastewater systems |
| Chilled or heated water pumping systems, heating systems, HVAC2, irrigation systems | ||
| Sewage systems | ||
| Pumping of petroleum products | ||
| Fans | Supply and exhaust ventilation, HVAC2, fans | |
| Compressors | Ventilation systems, refrigeration and freezing units, HVAC2 | |
| Accumulation and distribution of compressed air, pneumatic systems | ||
| Gas liquefaction systems, natural gas pumping systems | ||
| Rotate, blend, move | Rolling mill, machines: processing of metal, stone, plastic | |
| Pressing equipment: processing of aluminum, plastics | ||
| Textile processing: weaving, washing, drying | ||
| Mixing, shaking: food, paints, plastics | ||
| Transport | Passenger elevators, escalators, conveyors | |
| Freight elevators, cranes, hoists, conveyors, winches | ||
| Transport means: trains, trams, trolleybuses, cars, electric cars, buses, motorcycles, bicycles, rack railway, cable car | ||
| Angular movements (stepper motors, servo motors) | Valves (open/close) | |
| Servo (position setting) | ||
| Linear motors | Open close | Valves |
| Sorting | Production | |
| Grab and move | Robots |
Note:
- ED - electric motor
- HVAC - heating, ventilation and air conditioning systems
Torque, what is it and why is it needed?
Each internal combustion engine is designed to produce a certain maximum power that it can produce at a certain number of crankshaft revolutions. However, in addition to maximum power, there is also such a value in the engine characteristics as maximum torque, achieved at speeds other than maximum power speed.
What does the concept of torque mean?
Scientifically speaking, torque is equal to the product of force and the arm of its application and is measured in Newton meters. This means that if we apply a force of 1 Newton (perpendicular to the end of the wrench) to a wrench 1 meter long (arm), we will obtain a torque equal to 1 Nm.
For clarity. If the nut is tightened with a force of 3 kgf, then to unscrew it you will have to apply a force of 3 kg to a wrench with an arm length of 1 meter. However, if you put an additional 2-meter piece of pipe on a 1-meter long wrench, thereby increasing the lever to 3 meters, then to unscrew this nut you will only need a force of 1 kg. This is what many car enthusiasts do when unscrewing wheel bolts: either they add a piece of pipe, and in the absence of one, they simply press the key with their foot, thereby increasing the force applied to the wheel key.
Also, if you hang a load equal to 10 kg on a meter-long lever, then a torque equal to 10 kgm will appear. In the SI system, this value (multiplied by the acceleration of gravity - 9.81 m/cm2) will correspond to 98.1 Nm.
The result is always the same - torque is the product of force and the length of the lever, therefore, you need either a longer lever or a greater amount of applied force.
This is all well and good, but what is torque needed in a car and how does its magnitude affect its behavior on the road?
Engine power only indirectly reflects the traction capabilities of the motor, and its maximum value appears, as a rule, at maximum engine speed. In real life, almost no one drives in such modes, but the engine always requires acceleration, preferably from the moment you press the gas pedal. In practice, some cars behave quite quickly even from low speeds (from the bottom), while others, on the contrary, prefer only high speeds, and show sluggish dynamics at the bottom.
So, many people have a lot of questions when they drive a car with a gasoline engine with a power of 105-120 hp. change to 70-80 - a strong diesel engine, then the latter easily outperforms a car with a gasoline engine. How can this be?
This is due to the amount of traction on the drive wheels, which is different for these two cars. The amount of traction directly depends on the product of such indicators as the magnitude of torque, transmission gear ratio, its efficiency and the rolling radius of the wheel.
How is torque created in an engine?
The engine does not have meter-long levers and weights, and they are replaced by a crank mechanism with pistons. The torque in the engine is generated due to the combustion of the fuel - air mixture, which, expanding in volume, forcefully pushes the piston down. The piston, in turn, transmits pressure through the connecting rod to the crankshaft journal. In the engine characteristics there is no shoulder value, but there is a piston stroke value (double the radius of the crankshaft crank).
For any motor, torque is calculated as follows. When a piston with a force of 200 kg moves the connecting rod to a shoulder of 5 cm, a torque of 10 kgf or 98.1 Nm appears. In this case, to increase torque, you need to either increase the radius of the crank, or increase the pressure of expanding gases on the piston.
It is possible to increase the radius of the crank up to a certain amount, but the dimensions of the cylinder block will also increase, both in width and in height, and it is impossible to increase the radius indefinitely. And the engine structure will have to be significantly strengthened, as inertial forces and other negative factors will increase. Consequently, engine developers are left with a second option - to increase the force with which the piston transmits force to rotate the crankshaft. For these purposes, it is necessary to burn more combustible mixture in the combustion chamber and, moreover, of better quality. To do this, they change the size and configuration of the combustion chamber, make “displacers” on the piston heads and increase the compression ratio.