HYSTERESIS
HYSTERESIS (from the Greek ὑστέρησις - lag, delay), delay in physical changes. quantities characterizing the state of a substance from changes in other physical. quantity that determines external conditions. G. occurs in those cases when the state of the body at a given moment in time is determined by external conditions not only at the same time, but also at previous points in time. As a result, for cyclic process (increase and decrease in external influence), a loop-shaped (ambiguous) diagram is obtained, which is called a hysteresis loop. G. arises in decomposition. substances and with different physical processes. Of greatest interest are magnetic, ferroelectric and elastic hysteresis.
Magnetic geometry is an ambiguous dependence of the magnetization $\boldsymbol M$ of a magnetically ordered substance (magnet, for example, ferro- or ferrimagnet) on the external magnetic field $\boldsymbol H$ when it is cyclic. change (increase and decrease). The reason for the existence of magnetic geometry is the presence, in a certain interval, of changes in $\boldsymbol H$ among the states of the magnet that correspond to the thermodynamic minimum. potential, metastable states (along with stable ones) and irreversible transitions between them. Magnetic hysteresis can also be considered as a manifestation of magnetic orientational phase transitions of the 1st order, for which direct and reverse transitions between phases depending on $\boldsymbol H$ occur, due to the indicated metastability of states, at decomp. values of $\boldsymbol H$.
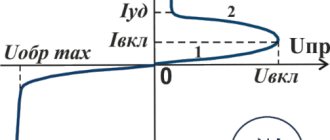
Rice. 1. Magnetic hysteresis loops: 1 – maximum, 2 – partial; a – magnetization curve, b and c – magnetization reversal curves; МR – residual magnetization, Нс – coercive force, Ms – magnetized...
In Fig. Figure 1 schematically shows the typical dependence of $M$ on $H$ in a ferromagnet; from the state $M=0$ at $H=0$, with increasing $H$ the value of $M$ increases (main magnetization curve, $\it a$) and in a sufficiently strong field $H⩾H_{\text m}$ $M$ becomes practically constant and equal to the saturation magnetization $M_{\text s}$. As $H$ decreases from the value of $H_{\text m}$, the magnetization changes along the branch $\it b$ and at $H=0$ takes the value $M=M_{\text R}$ (residual magnetization). To demagnetize a substance ($M=0$), it is necessary to apply a reverse field $H= –H_{\text c}$, called coercive force. Then, at $H=–H_{\text m}$, the sample is magnetized to saturation ($M=–M_{\text s}$) in the opposite direction. As $H$ changes from $–H_{\text m}$ to $+H_{\text m}$, the magnetization changes along the $\it in$ curve. The branches $\it b$ and $\it c$, resulting from changing $H$ from $+H_{\text m}$ to $–H_{\text m}$ and back, form a closed curve called maximal (or limit) loop G. The branches $\it b$ and $\it c$ are called, respectively, the descending and ascending branches of the loop G. When $H$ changes on the segment $[–H_1, H_1]$ with $H_1$, the dependence of $M (H)$ is described by a closed curve (partial loop of G.), entirely lying inside the max. hysteresis loops.
The described magnetic loops are characteristic of fairly slow (quasi-static) magnetization reversal processes. The lag of $M$ from $H$ during magnetization and demagnetization leads to the fact that the energy acquired by the magnet during magnetization is not completely released during demagnetization. The energy lost in one cycle is determined by the area of the loop G. These energy losses are called hysteresis. With dynamic When a sample is remagnetized by an alternating magnetic field $\boldsymbol H_{\sim}$, the hysteresis loop turns out to be wider than the static one due to the fact that dynamic losses are added to the quasi-equilibrium hysteresis losses, which can be associated with eddy currents (in conductors) and relaxation phenomena.
The shape of the magnetic loop and the most important characteristics of the magnetic magnetic resonance (hysteresis losses, $H_с$, $M_{\text R}$, etc.) depend on the chemical. the composition of the substance, its structural state and temperature, on the nature and distribution of defects in the sample, and, consequently, on the technology of its preparation and subsequent physical. treatments (thermal, mechanical, thermomagnetic, etc.). The hysteretic behavior of a number of other physical systems is associated with magnetic hysteresis. properties, eg. G. magnetostriction, G. galvanomagnetic and magneto-optical. phenomena, etc.
Ferroelectric G. - an ambiguous dependence of the magnitude of the electrical vector. polarization $\boldsymbol P$ of ferroelectrics on the strength $\boldsymbol E$ of the external electric. fields at cyclic changing the latter. Ferroelectrics have a spontaneous (i.e., spontaneous, arising in the absence of an external field) polarization $\boldsymbol P_{sp}$ in a certain temperature range. The direction of polarization can be changed electrically. field, while the value of $\boldsymbol P$ for a given $\boldsymbol E$ depends on the prehistory, i.e., on what the electric power was like. field at previous times. Ferroelectric G. has the appearance of a characteristic loop (G.'s loop), main. the parameters of which are the residual polarization $\boldsymbol P_{res}$ at $\boldsymbol E=0$ and the coercive field $\boldsymbol E_к$, at which the direction (switching) of the vector $\boldsymbol P_{cn}$ changes. For perfect single crystals, the G. loop has a shape close to rectangular, and $\boldsymbol P_{ost}=\boldsymbol P_{sp}$. In real crystals, the residual polarization is less than spontaneous due to the division of the crystal into domains.
The existence of ferroelectric G. follows from phenomenological. ferroelectric theory phenomena, according to which the equilibrium values of $\boldsymbol P_{sp}$ at any temperature below the ferroelectric temperature. phase transition corresponds to two symmetrical thermodynamic minima. potentials separated by a potential barrier. At $E=±E_к$ one of the minima disappears, and the crystal finds itself in a state with a certain direction of the vector $\boldsymbol P_{sp}$. When cyclic switching spontaneous polarization, the area of the G. loop determines the hysteresis losses - the amount of electrical energy. field turning into heat. The magnitude of the coercive field is also associated with the processes of nucleation and evolution in electricity. ferroelectric field domains - areas of the crystal with a dedicated electrical field in the direction of the spontaneous polarization vector.
Rice. 2. Elastic hysteresis loop.
Elastic g. - an ambiguous dependence of mechanical stress on the deformation of an elastic body during cyclic. application and removal of load. The graph of stress $σ$ versus strain $ε$ differs from a straight line segment corresponding to Hooke’s law and represents a G. loop (Fig. 2). The area of this loop is proportional to the mechanical energy that was dissipated (converted to heat) during the cycle.
The appearance of elastic stress in metals is due to the fact that in some polycrystal grains microstresses significantly exceed the average stress. stress in the sample, which leads to the appearance of plastic. deformations and thereby to the dissipation of mechanical. energy. In some cases, electromagnetic phenomena make a contribution to elastic gravity.
Elastic fluidity, as a manifestation of the difference between a real elastic body and an ideally elastic one, is observed in all solids, even at very low temperatures. Elastic vibration is the reason for the damping of free vibrations of elastic bodies, the damping of sound in them, and a decrease in the coefficient. recovery during an inelastic impact, etc. In the general case, the deviation of elasticity from ideal is included in the concept of internal friction.
General concepts of hysteresis
Hysteresis can be observed at those moments when a body in a specific period of time is dependent on external conditions. This state of the body is also considered at the previous time, after which a comparison is made and a certain relationship is derived.
A similar dependence is clearly visible in the example of the human body. To change his condition, you will need some period of time for relaxation. Therefore, the body’s reaction will always lag behind the reasons that caused the altered state. This lag is significantly reduced if changes in external conditions also slow down. However, in some cases, backlog reduction may not occur. As a result, an ambiguous dependence of quantities arises, known as hysteresis, and the phenomenon itself is called hysteresis.
This physical quantity can occur in a variety of substances and processes, but the concepts of dielectric, magnetic and elastic hysteresis are most often considered. Magnetic hysteresis usually appears in magnetic substances, such as ferromagnets. A characteristic feature of these materials is spontaneous or spontaneous inhomogeneous magnetization, which clearly demonstrates this physical phenomenon.
Magnetic hysteresis
Magnetic hysteresis is the phenomenon of dependence of the magnetization vector and the magnetic induction vector in a substance not only on the applied external field, but also on the history of a given sample. Magnetic hysteresis usually manifests itself in ferromagnets - Fe, Co, Ni and alloys based on them. It is magnetic hysteresis that explains the existence of permanent magnets.
The theory of the hysteresis phenomenon takes into account the specific magnetic domain structure of the sample and its changes during magnetization and magnetization reversal. These changes are due to the displacement of domain boundaries and the growth of some domains at the expense of others, as well as the rotation of the magnetization vector in domains under the influence of an external magnetic field. When all domains are fully oriented in the direction of the external field (the ferromagnet becomes “single-domain”), a saturation state . When the external field is turned off, there is a slight decrease in magnetization due to thermal motion in the crystal, but the ferromagnet remains magnetized, since at low temperatures the energy of thermal motion is relatively small and is not enough to completely misorient the domains.
These processes require large energy costs and are nonlinear. The demagnetization curve of a ferromagnet does not coincide with the magnetization curve. The change in the magnetization of the ferromagnet (and the field induction in it) lags behind the change in the external field strength. This phenomenon is called hysteresis. When the external field strength decreases to zero, the field induction in the magnet is not equal to zero, its value is called the residual induction Bo. To completely demagnetize a magnet, you need to change the direction of the external field to the opposite and increase it. At a certain value of the “reverse” field strength Hc, called coercive force, the magnet is completely demagnetized. A closed curve reflecting the process of magnetization reversal of ferromagnets is called a hysteresis loop (Fig. 1).
Fig.1. Hysteresis loop
On this graph, points B and C characterize the state of saturation. The magnitude of the residual induction is characterized by the segment B0.
The coercive force is determined by the point of intersection of the hysteresis loop with the axis of the magnetic field strength. Based on the magnitude of the coercive force, ferromagnets are divided into soft and hard magnetic materials.
Hard ferromagnets are used for permanent magnets; they have a large residual magnetization and a wide hysteresis loop.
Soft ferromagnets are used in devices and installations operating with alternating electromagnetic fields, where frequent magnetization reversal with minimal energy losses is required (for example, in transformer cores). They are characterized by a small residual magnetization and a narrow hysteresis loop.
Terminology
Hysteresis comes from the Greek and means lag or retardation. This concept is used in various branches of scientific and technical knowledge. The most general meaning of this word implies the different manner of behavior of systems in opposing influences.
This can be explained in detail as follows. Hysteresis is a condition that arises as a result of the influence of one physical quantity, magnetization, on another physical quantity from the external environment, a magnetic field.
Such a condition can be observed if the state of an object changes under the pressure of external conditions in the same and previous period of time.
The ambiguity in the dependence of such values can be observed in different processes because in order for the state of the body to undergo a change, it needs a certain period of time. And the slower the change in the external environment, the smaller the lag. This is hysteresis. It has magnetic, dielectric and elastic conditions.
We are interested in this magnetic phenomenon that occurs in electrical engineering. It is an important characteristic for the metal from which the core of an electrical machine or apparatus is made. Let's look at this process using a graph.
Shown here is the initial magnetization curve of a ferromagnetic material. It can be described in detail as follows.
Initially, having magnetized the core up to saturation in the segment “induction Bs, intensity Hs” and reducing the intensity from +Hs to 0, the induction will not change along curve 3, but will go along the higher section ABr of curve I. The magnetization of the material will remain at H = 0, and the field will acquire the characteristic of residual induction Br.
As H increases from 0 to the value H=-Hs, the direction of the current in the coil and the sign of the magnetic field strength H will change. When the induction reaches zero values when indicating the field strength H=Hs, which is the coercive force, the sign will change and saturation induction B will be achieved =-Bs at H=-Hs.
Having been magnetized, during a full cycle the dependence B (H) describes loop I, which is called the limit loop of magnetic hysteresis. Based on the value of Pc in the limit loop, there are soft and hard ferromagnets.
For practical purposes, this can be described as follows. Conductors carry current and contribute to the creation of magnetic and electric fields around it. An electromagnet is produced by winding a wire into a coil and passing current. The inductance of the coil will increase when a core is placed inside it with increasing forces generated on it.
Hysteresis depends on the metal from which the core is made; it is its type that determines the properties and work indicated by the magnetization curves.
When using hard magnetic metals such as steel, we will notice an expansion of the hysteresis. If our choice stops at soft materials, we will observe a narrowing of the graph.
Through a coil in a circuit with alternating current, current movements will be observed in different opposite directions.
As a result, the poles will always be flipped over. This process is simultaneous in the case of a coil that does not have a core.
However, if it is available, everything will change a little. Gradual magnetization will occur, magnetic induction will increase, and the horizontal section of the graph, designated as the saturation section, will be reached.
If you purposefully change the direction of the current and magnetic field, the core will be remagnetized. Even if you simply turn off the current and exclude the magnetic field, the core will remain magnetized, but will undergo some changes.
To demagnetize it to its original characteristics, it is necessary to create a minus magnetic field strength. This means that the coil with current should work in the opposite direction.
Here we should again mention the concept of coercive force and give it a clear definition based on practice. It shows how difficult the magnetization process is when the core is completely demagnetized. It's better if it's small.
Reverse magnetization reversal also occurs, but with the participation of the lower branch.
This means that the core will magnetize due to part of the energy in the alternating current circuit, which will lead to a decrease in the efficiency of the electric motor, transformer and heating of parts.
In order for losses due to core magnetization reversal to be minimal, the hysteresis and coercive force indicators must be small.
This phenomenon occurs in the operation of relays, in other electromagnetic devices and in the switching and closing current.
The relay will also work in the off state if a little current is applied. When turned on, the capping current will be higher than the holding current. A trip will occur if these values change to exactly the opposite values.
Hysteresis loop
On the graph of M versus H you can see:
- From the zero state, at which M = 0 and H = 0, with increasing H, M also increases.
- When the field increases, the magnetization becomes almost constant and is equal to the saturation value.
- As H decreases, the opposite change occurs, but when H = 0, the magnetization M will not be zero. This change can be seen in the demagnetization curve. And when H=0, M takes on a value equal to the residual magnetization.
- As H increases in the range –Ht… +Ht, the magnetization changes along the third curve.
- All three curves describing the processes are connected and form a kind of loop. It describes the phenomenon of hysteresis - the processes of magnetization and demagnetization.