Electrician in the house
Encyclopedia about electricity from A to Z
Masters catalog
Find the best master or company in your city
DC motor
Despite the fact that alternating current is actively used by people in everyday life and in various industries, direct current machines, despite some limitations, are still actively used in various fields of human activity. The essence of the operation of these units is the same - the conversion of mechanical energy into electrical energy, and vice versa.
Today we will tell you a lot of interesting things about these units, which were invented a long time ago, which have still changed practically nothing.
- Features of DC motors How machines operating on DC are designed
- Classification of DC machines
- Operating principle using the example of a DC motor
- Start and reverse mode
DC machines: what is it?
The use of electric current mainly consists of converting it into other types of energy, in particular mechanical.
Mechanical energy can also be converted into electrical energy. These transformations are carried out by direct and alternating current machines. In the first, direct current is supplied to the excitation winding.
Direct current machines (DCMs) that convert mechanical energy into electricity are called generators. Those performing the reverse conversion are engines.
Reversibility principle
From the above it follows that each DC machine can operate both in generator mode and in motor mode. This property is inherent in all types of rotating electrical machines and is called reversibility .
To transition a DC machine from generator mode to motor mode and back, with the polarity of the poles and brushes unchanged and the direction of rotation unchanged, only a change in the direction of the current in the armature winding is required.
Therefore, such a transition can be carried out quite simply and, under certain conditions, even automatically.
In a similar way, a change in operating mode can also occur in AC machines.
Device
MPT consists of two parts:
- inductor : stationary part;
- armature : rotates inside the inductor.
In AC machines, the inductor and armature are usually called stator and rotor, respectively. The inductor creates a primary magnetic field that acts on the armature in order to induce an EMF in it (generator) or force it to rotate (motor).
In low-power MPTs, the inductor is sometimes a permanent magnet, but more often, in order to achieve a uniform magnetic flux, an electromagnet is used, that is, a system of coils that creates a magnetic field (excitation winding) when a direct current flows through them.
Design of a DC machine
Each coil is wound on a core, together they form a magnetic pole. For proper distribution of magnetic flux, the core is equipped with a special tip. There can be several main poles. In addition to them, additional ones are used to ensure spark-free operation of the collector. The latter is an important element of MPT; its function will be discussed below.
The inductor yoke is also the MPT frame, which is why it is usually called that. Magnetic poles and bearing shields are attached to it (the armature shaft rotates). In essence, the yoke is only a part of the frame along which the magnetic fluxes of the main and additional poles are closed.
The armature is a core with grooves containing a wire laid in a certain order - a winding. The core is mounted on a shaft rotating in bearings. The collector is also fixed here.
The collector provides the ability to supply power to the rotating armature winding. It is a moving part of the so-called sliding commutator contact, and consists of several segment-shaped copper plates isolated from each other, mounted in the form of a cylinder on the armature shaft. The fixed part of the contact is represented by graphite or copper-graphite brushes fixed in brush holders. They are pressed against the collector plates by springs.
Generator mode
Let us first consider the operation of the machine in generator mode.
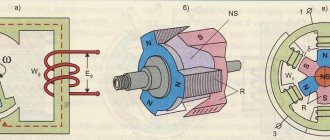
| Figure 1. The simplest DC machine | Figure 2. Operation of the simplest DC machine in generator (a) and motor (b) mode |
Let's assume that the machine's anchor (Figures 1 and 2, a) is rotated clockwise. Then e is induced in the conductors of the armature winding. d.s., the direction of which can be determined by the right-hand rule (Figure 3, a) and is shown in Figures 1 and 2, a. Since the flux of the poles is assumed to be constant, this e.g. d.s. is induced only due to the rotation of the armature and is called e. d.s. rotation _
Figure 3. Rules for the right (a) and left (b) hands
Values of the armature winding induced in the conductor e. d.s.
epr = B × l × v,
where B is the magnetic induction in the air gap between the pole and the armature at the location of the conductor; l is the active length of the conductor, that is, the length over which it is located in the magnetic field; v – linear speed of conductor movement.
Due to symmetry, the same em are induced in both conductors. d.s., which add up along the contour of the coil, and therefore the total e. d.s. anchors of the machine in question
| Eа = 2 × epr = 2 × B × l × v. | (1) |
E.m.f. Ea is variable, since the conductors of the armature winding pass alternately under the north and south poles, resulting in the direction of e. d.s. changes in the conductors. The shape of the curve is e. d.s. The conductor, depending on time t, repeats the distribution curve of induction B along the air gap (Figure 4, a).
Frequency e. d.s. f in a two-pole machine is equal to the speed of rotation of the armature n, expressed in revolutions per second:
f = n,
and in the general case, when the machine has p pairs of poles with alternating polarity,
| f = p×n | (2) |
If the armature winding with the help of brushes is closed through an external circuit, then a current Ia arises in this circuit, as well as in the armature winding. In the armature winding this current will be alternating, and its curve is similar in shape to the e curve. d.s. (Figure 4, a). However, in the external circuit the direction of the current will be constant, which is explained by the action of the collector. Indeed, when the armature and collector (Figure 1) are rotated by 90° and the direction of e.g. d.s. In the conductors, the collector plates under the brushes are also changed at the same time. As a result, under the upper brush there will always be a plate connected to the conductor located under the north pole, and under the lower brush there will always be a plate connected to the conductor located under the south pole. As a result, the polarity of the brushes and the direction of the current in the external circuit remain unchanged.
Figure 4. E curves. d.s. and the current of the simplest machine in the armature (a) and in the external circuit (b)
Thus, in a generator, the commutator is a mechanical rectifier that converts the alternating current of the armature winding into direct current in the external circuit.
By changing the sign of the second half-cycle of the curve in Figure 4, a, we obtain the shape of the current and voltage curve of the external circuit (Figure 4, b). The pulsating current generated in the external circuit is of little use for practical purposes. To obtain practically free current and voltage from ripples, a more complex armature winding and collector are used. However, the basic properties of a direct current machine can be established using the example of the simplest machine considered here.
The DC voltage at the generator armature terminals will be less than Ea by the amount of voltage drop in the armature winding resistance rа:
| Uа = Eа – Iа × rа. | (3) |
The conductors of the armature winding Ia with current are in a magnetic field, and therefore electromagnetic forces will act on them (Figure 2, a)
| Fpr = B × l × Iа, | (4) |
the direction of which is determined by the left-hand rule (Figure 3, b). These forces create a mechanical moment, which is called the electromagnetic moment and in Figure 2, a is equal to
| Mem = Fpr × Da = B × l × Da × Ia, | (5) |
where Da is the diameter of the armature. As can be seen from Figure 2, a, in generator mode this moment acts against the direction of rotation of the armature and is braking.
Operating principle
The operating features of the MPT depend on the mode in which it operates - generator or engine. Both options are discussed in detail below.
Generator
The operating principle of a direct current generator is based on the phenomenon of electromagnetic induction. It consists in the fact that when the magnetic flux crossing the conductor changes, an emf is induced in the latter.
Operating principle of a DC generator
To achieve a change in the magnetic flux, the field parameters are changed or the conductor is moved in a constant field. The second option is how the DC generator works: the armature winding is driven into rotation by an external mechanical force.
Obviously, after rotating the winding turns by 180 degrees, the EMF will be directed in the opposite direction. The collector helps keep the current in the circuit connected to the generator constant, that is, unidirectional: at the right moment, it reconnects the ends of the armature winding to the opposite contacts of the circuit (brushes). That is, in this machine the collector plays the role of a mechanical rectifier.
If there are only two main poles, the current will be pulsating. Increasing the number of poles leads to smoothing of the pulsations.
Engine
The operation of the MPT in motor mode is due to the appearance of the so-called ampere force. It acts on a conductor placed in a magnetic field when current flows through it. The direction of the ampere force is determined by the left-hand rule.
The Ampere force appears due to the following mechanism:
- when current flows around a conductor, a magnetic field arises with lines of force concentrically surrounding the conductor (circular field);
- the vector of its induction on one side of the conductor is co-directed with the induction vector of the primary magnetic field in which the conductor is placed. On this side the primary field is intensified;
- on the other side, the vector of the field induced by the electric current is directed opposite to the induction vector of the primary field, respectively, here it is extinguished;
- the difference in field induction on both sides of the conductor activates the occurrence of this force. It is determined by the formula: F = B * I * L, where: B is the magnetic induction of the primary field, I is the current strength in the conductor, L is the length of the conductor.
As in the case of a generator, after turning the armature winding to a certain position, switching contacts is required to change the direction of the current in it or the polarity of the inductor. Therefore, in engine mode, a commutator is also necessary.
Commutator motors have advantages:
- simplicity and wide range of adjustment;
- rigid mechanical characteristics (torque remains stable).
The disadvantage is the low reliability of the collector and its complexity, which negatively affects the cost of the engine.
Here are the undesirable phenomena that accompany the operation of the node:
- sparking;
- clogging with conductive graphite dust (brushes are made of this material);
- the appearance of interference in the network;
- under significant load - annular sparking (“all-round fire”), leading to burnout of the collector plates.
In order to combat shortcomings in some modern direct current motors (DCMs), the following solutions have been applied:
- The armature and inductor windings are swapped: the first is placed on the stationary part (stator), the second on the rotating part (rotor). The sliding contact remains, but due to the low load in the excitation winding, it is much simpler and more reliable than the commutator-brush contact;
- switching between the windings of the armature, now located in the stationary part, is carried out using semiconductor switches, triggered by a signal from the rotor position sensor. That is, the mechanical switch (collector) is replaced by an electronic one.
Such motors are called brushless motors, or BLDC motors abroad.
Working moments
Let's look at some characteristics and features of DC machines.
Start and reverse mode
A speed controller is connected to the electric motor
At the moment when the engine starts, the armature is in a stationary position, which means that the emf in it is zero. Due to the fact that the resistance of the armature winding is very small, the inrush current of the armature is much higher than the rated current. If you imagine starting an engine like this, it would definitely fail.
- To prevent this from happening, the starting current in DC motors with parallel excitation is limited due to the starting rheostat included in the circuit.
- In this case, the start must be carried out at the rated value of the magnetic flux, due to which the starting torque increases and the EMF in the armature winding quickly increases. As a result, the motor accelerates faster, and the time when a large starting current passes through the winding is reduced.
- When engine acceleration is completed, the rheostat is removed from the circuit - this is done either smoothly or stepwise.
- In order to stop the engine, it is enough to turn off the power supply to it.
- For any electric motor, a rotation mode in the opposite direction is available - reverse. To do this, you just need to change the direction of the current either in the armature winding or in the stator winding.
Interesting to know! Changing the direction of currents at the same time will lead to nothing; the motor will continue to rotate in the same direction.
Power loss and efficiency
Even the most technically advanced DC motor cannot operate without loss of power
Any DC motor or generator operates with power losses. They are divided into two types: basic and additional.
- The first include magnetic, electrical and mechanical.
- Magnetic losses occurring in steel are designated ΔРс. They occur due to the fact that during rotation the core on the armature is constantly remagnetized, so losses due to hysteresis and eddy currents occur.
- Electrical losses (ΔRel) occur due to the active resistance of the windings, as well as the resistance of the brush contact, that is, this value is presented as the sum of the specified losses.
- Mechanical (ΔРmech) include friction losses of bearings, friction of brushes on the commutator, friction of a rotating armature on air (and there is such a thing) and ventilation losses.
- All other losses are called incremental and they are mainly associated with the interaction of various parts of the unit with the magnetic field.
Losses are negligible when there is no load
Interesting to know! Power losses when operating in idle mode, that is, without load, are extremely small.
To calculate each type of loss, special formulas are used. We will not go into the essence so deeply, but will only say that the efficiency of a DC machine is determined by the ratio of the output power to the consumed one. This value is usually expressed as a percentage.
Modern DC machines have become very efficient. Their efficiency usually varies between 75-90%.
Performance characteristics
Performance characteristics of DPT
The performance characteristics are as follows:
- Rotation speed, current consumption and motor power;
- Efficiency from useful power, provided that the supply voltage remains constant.
- Excitation winding current and the absence of additional resistance in the armature circuit.
All these parameters allow us to talk about the properties of engines in operating mode, as well as to find optimal and economical modes of their operation.
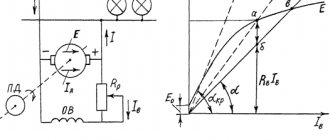
Adjusting the engine speed
Schematic diagram of the rotation speed controller
You can regulate the rotation speed of a DC machine in three ways: changing the network voltage, rheostatic regulation, changing the magnetic flux. Let's talk about everything in order.
- The voltage change is carried out by devices that can, in fact, change the voltage value.
- Rheostat control, as we already mentioned throughout the article, requires the introduction of additional active-type resistors into the armature circuit, that is, those that change their characteristics under certain conditions.
- The magnetic flux is regulated by reducing the excitation current.
Of course, we have not named all the characteristics of DC machines, but only the main ones, but this is quite enough to get acquainted with these units.
The video in this article will demonstrate how these devices work.
Classification of MPT according to the method of powering the inductor and armature windings
Based on this feature, MPTs are divided into 4 types.
With independent excitation
The inductor and armature windings have no electrical connection. In generators of this type, the excitation winding is powered by a direct current network, a battery, or a generator specially designed for this purpose - an exciter. The power of the latter is several hundredths of the power of the main generator.
Scope of application of generators with independent excitation:
- systems of significant power, where the voltage on the excitation winding differs significantly from the generated one;
- systems for regulating the rotation speed of engines powered by generators.
For motors with independent excitation, the armature winding is also energized. Basically these are also high-power units.
The independence of the inductor winding makes it more convenient and economical to regulate the excitation current. Another feature of such motors is the constancy of the excitation magnetic flux under any load on the shaft.
With parallel excitation
The inductor and armature windings are connected in one circuit parallel to each other. Generators of this type are usually used for medium power. In a parallel connection, the voltage generated by the device is applied to the excitation winding. When the inductor and armature windings are connected into one circuit, they speak of a self-excited generator.
In motors with parallel excitation, the inductor is supplied with the same voltage and from the same power source as the armature.
In terms of their characteristics, they are identical to motors with independent excitation and have the following features:
- when the load changes, the rotation speed is practically not transformed: the deceleration is no more than 8% when transferring from idle to rated load;
- it is possible to regulate the rotation speed with minimal losses, and within a wide range - 2 times, and for specially designed motors, 6 times.
The inductor of a rotating parallel-wound motor cannot be disconnected from the armature circuit, even if it is already disconnected. This will lead to the induction of a significant EMF in the excitation winding with subsequent failure of the motor. Personnel nearby may be injured.
With sequential excitation
The windings are connected in series to each other. The armature current flows through the field winding. Generators of this type are almost never used, since the process of self-excitation occurs quite rapidly and the device is not able to provide the constant voltage required by most consumers. They are used only in special installations.
Series excitation circuit
Motors of this type are widely used as traction motors (electric locomotives, trolleybuses, cranes, etc.): compared with parallel excitation analogues, when loaded they produce a higher torque with a simultaneous decrease in rotation speed. The starting torque is also high.
Starting the engine with a load below 25% of the rated load, and even more so at idle, is unacceptable: the rotation speed will be too high and the unit will fail.
With parallel-series (mixed) excitation
There are two types of scheme:
- the main winding of the inductor is connected in parallel with the armature winding, the auxiliary winding is connected in series;
- The main winding of the inductor is connected in series with the armature winding, the auxiliary winding is connected in parallel.
Schemes of MPT excitation systems
Connecting a parallel winding before a series winding is called a “short shunt”, and after a series winding - a “long shunt”. Generators of this type are used extremely rarely.
The engines combine the advantages of analogues with parallel and series excitation: they are able to operate at idle speed and at the same time develop significant traction force. But they are almost never used today.
Engine mode
The simplest machine under consideration can also operate as a motor if its armature winding is supplied with direct current from an external source. In this case, electromagnetic forces Fpr will act on the conductors of the armature winding and an electromagnetic moment Mem will arise. The quantities Fpr and Mem, as for the generator, are determined by equalities (4) and (5). With a sufficient value of Mem, the armature of the machine will begin to rotate and will develop mechanical power. The moment Mem is driving and acts in the direction of rotation.
If we want the direction of rotation of the generator (Figure 2, a) and the engine (Figure 2, b) to be the same with the same pole polarity, then the direction of action , and therefore the direction of the current Ia of the engine should be reversed compared to the generator (Figure 2, b).
In motor mode, the commutator converts the direct current consumed from the external circuit into alternating current in the armature winding and thus works as a current inverter.
The conductors of the motor armature winding also rotate in the magnetic field, and therefore e is also induced in the motor armature winding. d.s. Eа, the value of which is determined by equality (1).
The direction of this e. d.s. in the engine (Figure 2, b) is the same as in the generator (Figure 2, a). Thus, in the engine e. d.s. armature Ea is directed against the current Ia and the voltage Ua applied to the armature terminals. Therefore e. d.s. The motor armature is also called counter-electromotive force .
The voltage applied to the motor armature is balanced by e. d.s. Eа and voltage drop in the armature winding:
| Uа = Eа + Iа × rа. | (6) |
From a comparison of equalities (3) and (6) it is clear that in the generator Ua < Ea, and in the engine Ua > Ea.
Classification of electrical machines according to the method of excitation
Open Joint Stock Company "Russian Railways"
Sverdlovsk Training Center for Professional Qualifications –
structural division of the Sverdlovsk Railway
ABSTRACT
ELECTRICAL MACHINES ELECTRIC LOCOMOTIVES VL11, VL11m
for training groups for electric locomotive drivers and assistant drivers
(project)
Ekaterinburg
2017
Electrical machines of electric locomotives
Electrical machines are divided according to their purpose into two main types: electric generators and electric motors.
Generators are designed to generate electrical energy and convert mechanical energy into electrical energy. To do this, you need to rotate its shaft with some kind of engine. On a diesel locomotive, for example, the generator is driven by a diesel engine; at a thermal station, by a steam turbine.
Electric motors convert electrical energy into mechanical energy and are designed to drive locomotive wheel sets and rotate the shafts of auxiliary machines (fans, compressors, etc.). Therefore, for the electric motor to operate, it must be connected by wires to a source of electrical energy, i.e. include in an electrical circuit.
The operation of an electric motor is based on the interaction of a conductor through which an electric current passes with a magnetic field. In this case, a mechanical force arises, which, depending on the direction of the magnetic field and the current in the conductor, causes the conductor to move in one direction or another.
The winding conductors are fixed to the armature. As a result of the interaction of the magnetic field with the winding connected to the source of electric current, the armature begins to rotate. The direction of rotation is determined by the left-hand rule.
Rice. 5.8. Interaction of magnetic fields of poles and armature wire:
a is the magnetic field of the poles;
b - magnetic field of one turn;
c - interaction of the magnetic field of the poles and the field of turn 1 ;
g - interaction of the magnetic field of the poles and the field of turn 2
In Fig. Figure 5.8 shows the interaction of the magnetic fields of the poles and the armature wires. As a result of the interaction of these fields, turn 1 together with the collector will begin to rotate in a clockwise direction (Fig. 5.8.c). When it takes the position shown in Fig. 5.8.d, a pair of collector plates (to which this turn is attached) will come out from under the brushes and the current will stop passing through this turn, but a second pair of plates will be under the brushes and the current will now flow along turn 2 .
Turn
2
will rotate in the same direction as turn
1 .
Main parts of electrical machines
The main parts of a DC machine are: frame (frame), poles, armature, brush apparatus and some auxiliary parts that serve for the design of the machine.
The frame (frame) is the stationary part of the machine, cast from steel, used for fastening poles and bearing shields and is part of the magnetic circuit.
Poles . In modern stationary and traction machines, main and additional poles are installed.
Main poles,
on which the excitation winding coils are located, serve to create a magnetic excitation flux in the machine.
The part of the main pole core on the side facing the armature is made wider and is called the pole piece
. This part serves to support the coil, as well as to better distribute the magnetic flux over the surface of the armature. Electrical machines can have two, four, or six main poles.
Additional poles provide a reduction in sparking (improved commutation) that occurs during machine operation. They are smaller in size than the main poles. The number of additional poles is usually equal to the number of main ones.
The anchor consists of:
· core (sheets of electrical steel insulated from each other), mounted on the armature shaft;
· windings (laid in the grooves of the armature);
· collector (wedge-shaped plates isolated from each other);
· shaft.
The brush apparatus is used to connect the commutator to the external circuit.
The frame, poles and armature make up the magnetic system of the machine ,
through which the magnetic flux created by the excitation winding closes. The air gap between the armature and the poles is also one of the participants in the magnetic circuit.
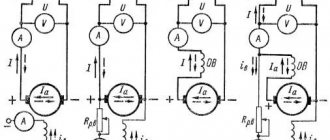
Classification of electrical machines according to the method of excitation
According to the methods of excitation, DC machines can be classified as follows:
· machines of independent excitation, in which the excitation winding (0V) is supplied with direct current from a source not electrically connected to the armature winding;
· parallel excitation machines, in which the field winding and the armature winding are connected in parallel;
· series excitation machines, in which the excitation winding and the armature winding are connected in series;
·
mixed excitation machines, in which there are two excitation windings - parallel OB1 and serial OB2;
Series-wound motors:
Advantages:
— wide limit of traction torque control;
— wide speed control limit;
— constancy of power consumed by the electric locomotive: M1×V1 = M2×V2
Flaws:
— the softness of the characteristics affects the presence of the space boxing mode;
—When voltage surges occur, surges in traction force and speed fluctuations appear.